Назначение
Эта серия инверторов используется для управления обычными асинхронными электродвигателями и асинхронными электродвигателями с переменной частотой, их нельзя использовать для однофазных электродвигателей и других целей.
Клеммы цепи управления
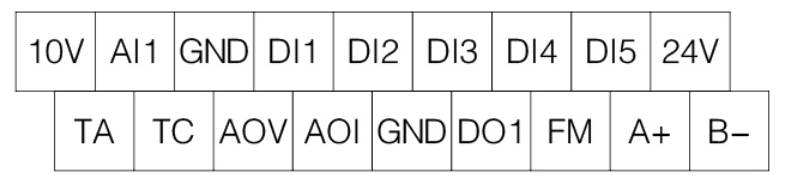
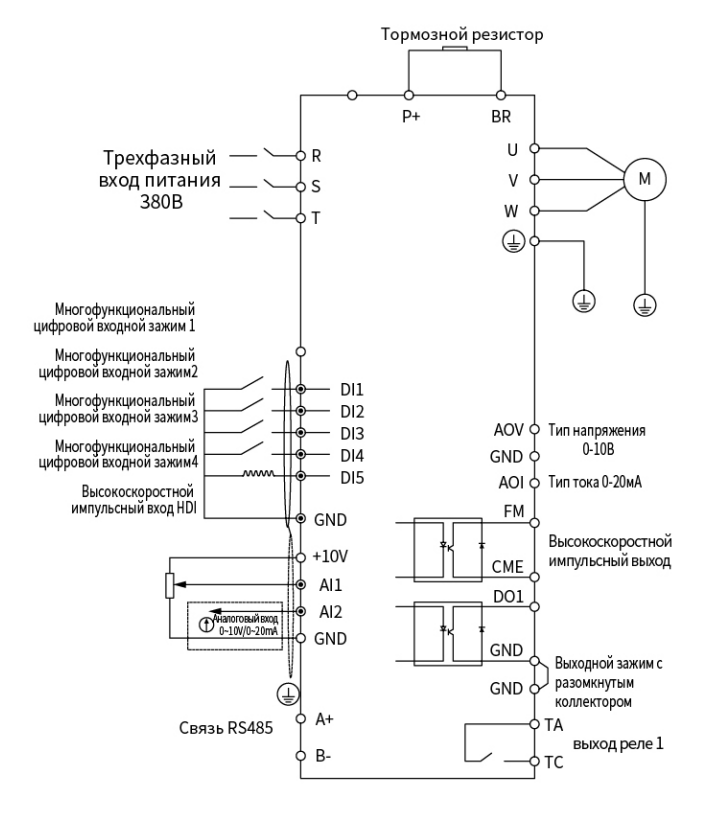
Схема подключения
Внешний вид и элементы индикации
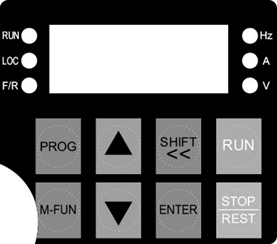
| Клавиша | Название клавиши | Функция клавиши |
| PROG | Клавиша программирования | Вход или выход из меню первого уровня |
| M-FUN | Многофункциональная клавиша выбора | Выберите переключение функций согласно Р7-01, которое может быть определено как источник команды или быстрое переключение направления . |
 |
Клавиша приращения | Увеличение данных или кода функции |
 |
Клавиша декремента | Уменьшение данных или кода функции |
| SHlFT | Клавиша сдвига | В интерфейсе дисплея выключения и в интерфейсе работающего дисплея параметры дисплея могут выбираться циклически, при изменении параметров можно выбирать биты изменения параметров. |
| ENTER | Клавиша подтверждения | Войдите в экран меню шаг за шагом и подтвердите заданные параметры |
| RUN | Клавиша запуска | В режиме работы с клавиатурой, используется для работы |
| STOP | Клавиша Стоп | В рабочем состоянии нажатие этой клавиши может использоваться для остановки рабочей операции, в состояние тревоги неисправности — для сброса операции. Характеристики этой клавиши ограничены функциональным кодом РТ02. |
Список доступных параметров
Если для РР-00 установлено ненулевое значение, устанавливается пароль защиты параметров. В режиме параметров функции и режиме изменения параметров пользователя меню параметров можно открыть только после правильного ввода пароля. Чтобы отменить пароль, РР-00 должен быть установлен на 0. Меню параметров в режиме пользовательских поставленных параметров не защищено паролем.
Группа Р и Группа А являются основными функциональными параметрами , а Группа U — параметрами функции мониторинга.
| Код функции | название | Диапазон установок | завод. значение |
| РО-О1 | Метод управления электродвигателем. | 0: Бессенсорный векторный контроль / F контроль | 2 |
Основные функциональные параметры
| Код функции | название | Диапазон установок | заводское значение |
| РО-О2 | Выбор источника команды | 0: Командный канал панели управления (светодиод не горит) 1: Командный канал зажима (светодиод включен) 2: Командный канал связи (светодиод мигает) |
0 |
| 90-03 | Выбор источника основной частоты Х | 0: Установить цифры (предварительно установленная частота РО-08, UP / DOWN может быть изменена, не запоминается после сбоя питания) 1: Установить цифры (можно установить предустановленную частоту РО-08, ИР / DOWN может быть изменена, память при отключении питания) 2 :A11 З: Панельный потенциометр 4: Потенциометр внешней панели 5: HDl установка импульса (D15) 6: Многосегментная инструкция 7: Простой PLC 8: plD 9: Сообщение дано |
| РО-О4 | Выбор источника вспомогательной частоты У | То же, что РО-0З,выбор источника основной частоты Х | 0 |
| 90-05 | При наложении он помогает выбрать диапазон У источника частоты. | 0: Относительно максимальной частоты 1: Относительно частоты источника Х |
0 |
| РО-О6 | Диапазон вспомогательного источника частоты У при наложении | 00/0 150% | 100% |
| РО-О7 | Выбор наложения источника частоты | Разряд единиц: выбор источника частоты 0: Основной источник частоты Х 1: Первичные и вторичные результаты операции (отношение операции определяется разрядами десятков) 2: Переключение между источником основной частоты Х и источником вспомогательной частоты У З: Переключение между источником основной частоты Х и результатами основного и вспомогательного расчета 4: Переключение между источником вспомогательной частоты У и результатами основного и вспомогательного расчета Разряд десятков: отношение основного и вспомогательного операции источника частоты 0: основный + вспомогательный 1: основный вспомогательный 2: Максимум обоих З: Минимум обоих |
00 |
| РО-О8 | Предустановленная частота | 0,00 Гц до максимальной частоты (РО-10) | 50.00Hz |
| 90-09 | Направление движения | 0: Одинаковое направление 1: Противоположное направление |
0 |
| РО-1О | Максимальная частота | 5.00Hz 500.00Hz | 50.00Hz |
| РО-11 | Верхний источник частоты | 0: (Настройка РО-12) 2: Местный потенциометр З: Потенциометр панели и потенциометр внешней клавиатуры 4: установка импульса 5: Сообщение дано |
0 |
| 90-12 | Верхняя граничная частота | Нижняя граничная частота РО-14- Максимальная частота 90-10 | 50.00Hz |
| 90-13 | Сдвиг верхней частоты | 0.00Hz Максимальная частота РО-10 | 0.00Hz |
| РО-14 | Нижняя граничная частота | 0.00Hz верхняя граничная частота РО-12 | 0.00Hz |
| 90-15 | несущая частота | 2.0kHz 8.0kHz | Определение модели |
| И-16 | Несущая частота регулируется в зависимости от температуры | О: да 1: нет |
1 |
| 90-17 | (Время ускорения 1) | 0-650 | Определение модели |
| РО-18 | (Время замедления 1) | 0-650 | Определение модели |
| 90-19 | Единица времени ускорения / замедления | 0: 1 секунда 1: 0,1 секунды 2: 0,01 секунды |
1 |
| ро-21 | Помогите источнику частоты сместить частоту при наложении | 0.00Hz (Максимальная частота РО-10 | 0.00Hz |
| ро-22 | Разрешение команды частоты | 2: 0.01Hz | 2 |
| 90-23 | Цифровая установка частоты и выбор памяти отключения | 0: не сохранять в памяти 1: сохранять в памяти |
0 |
| 90-25 | Опорная частота времени разгона / замедления | 0: Максимальная частота(Р0-10) 1: Установить частоту |
0 |
| 90-26 | Частота команды во время выполнения UP/DOWN (основной критерий) | 0: Рабочая частота 1: Установить частоту |
0 |
| 90-27 | Источник команд и связанный источник частоты | Разряд единиц: Команды панели управления, выбор источника частоты привязки 0: нет привязки 1: Цифровая установка частоты 2: АП 4: Панельный потенциометр 5: HDl установка импульса (D15) б: Многоскоростной 7: Простой PLC 9: Сообщение дано Разряд десятков: выбор источника частоты привязки команды зажима разряд сотен: выбор источника частоты связи команды связи |
0000 |
| 91-00 | Выбор типа электродвигателя. | 0: Обычный асинхронный электродвигателя. 2: Постоянный магнит синхронный электродвигателя |
0 |
| Р1-О1 | Номинальная мощность электродвигателя. | 0.1kW 1000.0kW | Определение модели |
| Р1-О2 | Номинальное напряжение электродвигателя. | 1-2000В | Определение модели |
| Р1-ОЗ | Номинальный ток электродвигателя . | 0.01А 10.00А Мощность конвертора 2.2kW | Определение модели |
| Р1-О4 | Номинальная частота электродвигателя. | 0.01HZ Максимальная частота | Определение модели |
| Р1-О5 | Номинальная скорость электродвигателя. | 1rpm 65535rpm | Определение модели |
| Р1-1О | Ток холостого хода асинхронного электродвигателя. | 0.01А РЫЗ | Определение модели |
| Р1-З7 | Выбор настройки | 0: Нет операции 1: Статическая настройка асинхронной машины 2: Динамическая настройка асинхронной машины | 0 |
| Р2-ОО | Коэффициент пропорциональности усиления контура скорости 1 | 1 100 | |
| 92-01 | Время интеграции контура скорости 1 | 0.01s 10.00s | 0.505 |
| Р2-О2 | Частота переключения 1 | 0.00 Р2-О5 | 5.00Hz |
| Р2-ОЗ | Коэффициент пропорциональности усиления контура скорости 2 | 1 100 | 20 |
| Р2-О4 | Время интеграции контура скорости 2 | 0.01s 10.00s | 1.00s |
| 92-05 | Частота переключения 2 | Р2-02 Максимальная частота | 10.00Hz |
| 92-06 | Векторное управление усиления скольжения | 200% | 100% |
| 92-07 | SVC время фильтра обратной связи по скорости | 0.ooos 1.ooos | 0.050s |
| 92-09 | Источник верхнего предела вращающего момента (электрический) в режиме управления скоростью | 0: Код функции Р2-1О установить 2: A12 З: Панельный потенциометр 4: установка импульса 5: Сообщение дано 6: MlN(A11, АП) 1-7 Вариант полной шкалы соответствует Р2-1О | 0 |
| 93-00 | VF Установка кривой | 0: прямая линия V/F 1: многоточечный V/F 2: квадрат V/F З: в степени 1,2 V/F 4: в степени 1,4 V/F 6: в степени V/F 8: в степени 1,8 V/F 9: оставлять 10: Режим полного разделения 11: Полуотдельный режим | 0 |
| 93-01 | Усиление вращающего момента | 0.0%: (Автоматическое повышение вращающего момента) 0.1% 30.0% | Определение модели |
| РЗ-О2 | Частота отсечки повышения вращающего момента | 0.00Hz Максимальная частота | 50.00Hz |
| РЗ-ОЗ | Многоточечный VF Частота точка 1 | 0.00Hz РЗ-О5 | 0.00Hz |
| Р5-О9 | FMP Максимальная выходная частота | 0.01kHz 100.00kHz | 50.00kHz |
| Р5-1О | АО1 коэффициент нулевого отклонения | -100.0% +100.0% | |
| 95-11 | АО1 приращение | -10.oo +10.oo | 1.00 |
| 95-17 | FMR Время задержки на выходе | 0.0s 3600.0s | |
| 95-18 | RELAY1 время задержки на выходе | 0.0s 3600.0s | |
| RELAY2 время задержки на выходе | 0.05 3600.0s | ||
| Р5-2О | 001 Время задержки на выходе | 0.0s 3600.0s |
| Р6-ОО | способ запуска | 0: прямой запуск 1: Перезапуск отслеживания скорости 2: Пуск с предварительным возбуждением (асинхронная машина переменного тока) |
0 |
| Рб-О1 | Режим отслеживания скорости вращения | 0: Начиная с частоты останова 1: Начиная с рабочей частоты 2: Начиная с максимальной частоты | 0 |
| Рб-О2 | Скорость отслеживания скорости вращения | 1-100 | 20 |
| 96-03 | Частота запуска | 10.00Hz | 0.00Hz |
| рб-04 | Время удержания частоты запуска | 100.0s | |
| 96-05 | Пусковой постоянный ток торможения / ток предварительного возбуждения | 00/0 100% | |
| 96-06 | Время торможения запуском постоянным током /время предварительного возбуждения. | 100.0s |
| Р6-О7 | Метод ускорения и замедления | 0: Прямолинейное ускорение и замедление 1: Статическое 2: Динамическая |
0 |
| Р6-О8 | Пропорция времени начального участка кривой S | 0.0% (100%-P6-09) | ЗО.О% |
| 96-09 | Пропорция времени окончательного участка кривой S | 0.0% (100%-P6-08) | ЗО.О% |
| Рб-1О | Режим остановки | 0: Остановка замедления 1: (Свободная парковка | 0 |
| 96-11 | Стартовая частота при остановке постоянного торможения. | 0.00Hz Максимальная выходная частота | 0.00Hz |
| 96-12 | Время ожидания торможения постоянным током при остановке. | 0.0s 100.0s | |
| Рб-1З | Постоянный ток торможения при остановке | 100% | |
| 96-14 | Время торможения постоянным током при останове | 0.05 100.0s | |
| 96-15 | коэффициент использования торможения | 100% | 100% |
Примечание: Полный список параметров доступен в файле в конце страницы.
Ошибки преобразователя
| Название неисправности | Дисплей панели управления | Проверка причины отказа | Контрмеры для обработки неисправности |
| защита инверторного элемента | Errm | 1. Короткое замыкание в выходном контуре конвертора. 2.Слишком длинная проводка электродвигателя и инвертора. З. Модуль перегревается. 4. Внутренняя проводка конвертора ослаблена. 5.0сновная плата управления неисправна 6.Плата водителя ненормальная 7. Инверторный модуль неисправен. |
1.Устранение периферийных неполадок. 2.Установить реактор или выходной фильтр. З. Проверить засорение воздухозаборника, нормальную работу вентилятора и устранить проблемы. 4. Вставить все соединительные линии 5,06ратиться за технической поддержкой. 6,06ратиться за технической поддержкой. 7.06ратиться за технической поддержкой. |
| Ток ускорялся | Err02 | 1.3аземление или короткое замыкание в выходном контуре конвертора. 2.Метод управления — векторный и не выполняет идентификацию параметра. З. Время разгона слишком мало 4. ручное повышение вращающего момента или кривая М / F не подходит. 5.Низкое напряжение 6.3апуск вращающегося электродвигателя. 7.Внезапная нагрузка во время ускорения. 8.Лектотип конвертора слишком мал. | 1.Устранение периферийных неполадок. 2.Проводить идентификацию параметров электродвигателя. З. Увеличить время разгона. 4.0трегулируйте ручной подъемный вращающий момент или кривую М / F. 5.0трегулируЙте напряжение до нормального диапазона. 6.Выберите запуск с отслеживанием скорости вращения или запуск после остановки электродвигателя. 7. Снять внезапную нагрузку 8.Выберите конвертор с более высоким уровнем мощности. |
| Ток замедлялся | Err0З | Заземление или короткое замыкание в выходном контуре инвертора. Метод управления — векторный и не выполняет идентификацию параметра. З. Время замедления слишком короткое. 4.Низкое напряжение 5.Внезапная нагрузка в процессе замедления 6.Тормозной блок и тормозной резистор не установлены. | 1.Устранение периферийных неполадок. 2.Проводить идентификацию параметров электродвигателя . З. Увеличить время замедления. 4.0трегулируйте напряжение до нормального диапазона. 5. Снять внезапную на грузку 6.Установка тормозного блока и резистора. |
| Ток был с постоянной скоростью | Err04 | Заземление или короткое замыкание в выходном контуре инвертора. Метод управления — векторный и не выполняет идентификацию параметра. З. Низкое напряжение 4. Есть ли внезапная нагрузка во время работы. 5.Лектотип конвертора слишком мал. | 1.Устранение периферийных неполадок. 2.Проводить идентификацию параметров электродвигателя . 3.0трегулируйте напряжение до нормального диапазона. 4. Снять внезапную на грузку 5.Выберите конвертор с более высоким уровнем мощности. |
| Напряжение ускорялось | Err05 | 1.Высокое входное напряжение. 2.Внешняя сила затягивает электродвигатель во время ускорения. З. Время ускорения слишком короткое. 4.тормозной блок и тормозной резистор не установлены. | 1.0трегулируйте напряжение до нормального диапазона. 20тменить внешнее усилие или установить тормозной резистор. З. Увеличить время разгона. 4..Установка тормозного блока и резистора. |
| Напряжение замедлялось | Err06 | 1.Высокое входное напряжение. 2.Внешняя сила затягивает электродвигатель во время замедления. З. Время замедления слишком короткое. 4.Тормозной блок и тормозной резистор не установлены. | 1.0трегулируЙте напряжение до нормального диапазона. 2.0тменить внешнее усилие или установить тормозной резистор. 3.Увеличить время замедления. 4. .Установка тормозного блока и резистора. |
| Напряжение было с постоянной скоростью | Err07 | 1.1.Высокое входное напряжение. 2.Внешняя сила затягивает электродвигатель во время работы. | 1.0трегулируйте напряжение до нормального диапазона. 2.0тменить внешнее усилие или установить тормозной резистор. |
| Неисправность управления питанием. | Err08 | 1. Входное напряжение не находится в пределах, указанных в спецификации. | 1.0трегулируйте напряжение до нормального диапазона. |
| Неисправность пониженного напряжения. | Err09 | 1.Мгновенный перерыв в подаче энергии. 2.Входное напряжение конвертора не находится в диапазоне, требуемом спецификацией. З. Ненормальное напряжение шины. 4. Ненормальный выпрямительный мост и буферное сопротивление. 5.Плата водителя ненормальная. 6.Плата управления ненормальная. | 1.(сброс неисправности) 2.0трегулируйте напряжение до нормального диапазона. З.(Обратиться за технической поддержкой) 4.(Обратиться за технической поддержкой.) 5.(Обратиться за технической поддержкой.) 6.(Обратиться за технической поддержкой.) |
| перегрузка инвертора | Err10 | 1.Имеет ли нагрузка слишком большой или происходит заторможенный ротор электродвигателя. 2.Лектотип конвертора слишком мал. | 1.Уменьшите нагрузку и проверьте состояние электродвигателя и машины. 2. Выберите конвертор с более высоким уровнем мощности. |
| Перегрузка электродвигателя | Err11 | 1.Правильно ли настроен параметр защиты электродвигателя Р901. 2.Имеет ли нагрузка слишком большой или происходит заторможенный ротор электродвигателя. З. Лектотип конвертора слишком мал. | 1. Установите этот параметр правильно. 2. Уменьшите нагрузку и проверьте состояние электродвигателя и машины. З. Выберите конвертор с более высоким уровнем мощности. |
| Потеря входной фазы | Err12 | 1.Трехфазная входная мощность является ненормальной 2. Плата водителя ненормальная З. Аномалия противоминной доски . 4.0сновная плата управления неисправна | Проверьте и устраните проблемы в периферийных цепях Обратиться за технической поддержкой Обратиться за технической поддержкой Обратиться за технической поддержкой |
| Потеря входной фазы | Err13 | Вывод от конвертора к электродвигателю ненормальный Несбалансированный трехфазный выход конвертора при работающем электродвигателе Плата водителя ненормальная модульная аномалия | Устранение неполадок периферии Проверьте, нормально ли работает трехфазная обмотка электродвигателя, и устраните неисправность. Обратиться за технической поддержкой Обратиться за технической поддержкой |
| Модуль перегревается. | Err14 | Температура окружающей среды слишком высокая Заблокирован воздуховод Вентилятор сломан Термистор модуля поврежден Инверторный модуль поврежден | Уменьшите температуру окружающей среды Очистить воздуховод З. Заменить вентилятор 4. Заменить термистор 5. Заменить модуль инвертора |
| Неисправность внешнего оборудования. | Err15 | Подайте сигнал о внешней неисправности через многофункциональную клемму Dl.Введите сигнал о внешней неисправности через виртуальную функцию 10 | 1.Сбросить операцию 2. Сбросить операцию |
| Чрезмерное отклонение скорости. | Err42 | Заторможенный ротор электродвигателя. Неправильное подключение выхода конвертора UVW к электродвигателю З.Р0-01 и другие параметры установлены неправильно | 1. Убедитесь, что машина неисправна 2. Проверьте, не нарушена ли проводка между конвертором и электродвигателем. З. Эта ошибка может быть сброшена с помощью РР-01 = 1 |
| Отказ электродвигателя от перегрева. | Err45 | 1. Проводка датчика температуры ослаблена 2.Слишком высокая температура электродвигателя. | 1.Проверьте проводку датчика температуры и устраните неисправности. 2.Уменьшите несущую частоту или примите другие меры для охлаждения электродвигателя. |
| Ошибка начального положения | Err51 | 1.Параметр электродвигателя слишком далек от фактического. | 1.Подтвердите правильность параметров электродвигателя и сфокусируйтесь на том, установлен ли слишком маленький номинальный ток |
Примечание: Полный список ошибок доступен в файле в конце страницы.
Скачать руководство по эксплуатации.

-
Уже зарегистрированы? Войти
Войти
-
Запомнить
Не рекомендуется для компьютеров с общим доступом -
Войти анонимно
-
Забыли пароль?
-
Регистрация
Изменение в правилах «Опознайки»
Один объект для опознания — одна тема.
Запрещается размещать групповые фотографии или несколько разных объектов для опознания.
Авторизация
Подписчики
4

Автор
Murka
- Найти другие файлы
1 изображение
Информация о файле
Sako SKI780W. Переведённый скан англоязычной инструкции инвертора. Описана минимальная конфигурация настроек для работы с асинхронным двигателем.

0
Предыдущий файл
BRAIT MIG-250QD, MIG-300QD, сварочный полуавтомат инверторного типа. Руководство по эксплуатации
Следующий файл
Аппаратура управления Констар
Эта серия инверторов используется для управления обычными асинхронными электродвигателями и асинхронными электродвигателями с переменной частотой, их нельзя использовать для однофазных электродвигателей и других целей.
Клеммы цепи управления
0
Предыдущий файл
BRAIT MIG-250QD, MIG-300QD, сварочный полуавтомат инверторного типа. Руководство по эксплуатации
Следующий файл
Аппаратура управления Констар

































 +
+ 
