Квадрокоптеры стали популярным развлечением для людей всех возрастов, но, чтобы получить полный контроль над устройством, необходимо настроить его с помощью 6-axis gyro. Это небольшой инструмент, который позволяет квадрокоптеру стабильно летать в воздухе и управлять им в воздухе. Но как его настроить и на что обратить внимание?
В этой статье вы найдете подробный гайд о том, как правильно настроить квадрокоптер с 6-axis gyro. Вы узнаете, как настроить датчики, стабилизаторы и другие элементы квадрокоптера, чтобы получить максимальную стабильность и управляемость при полете. Мы расскажем о простых шагах, которые нужно выполнить, чтобы начать полеты и наслаждаться ими в полной мере.
Пошаговая инструкция в данной статье позволит вам быстро и легко освоить настройку квадрокоптера с 6-axis gyro и получить максимум удовольствия от полетов. Кроме того, мы расскажем об основных ошибках, которые допускают начинающие пользователи, и как их избежать.
Содержание
- Как настроить квадрокоптер с 6 axis gyro: подробный гайд
- 1. Подключение
- 2. Калибровка датчиков
- 3. Настройка угла наклона
- 4. Настройка чувствительности джойстика
- 5. Тестирование
- Калибровка гироскопа
- Что такое калибровка гироскопа?
- Как провести калибровку гироскопа?
- Когда нужно проводить калибровку гироскопа?
- Настройка PID регуляторов
- Что такое PID регуляторы?
- Процесс настройки PID
- Что делать после настройки PID?
- Настройка системы стабилизации
- Настройка радиоаппаратуры
- Выбор радиоаппаратуры
- Подключение и настройка радиоаппаратуры
- Проверка радиоаппаратуры
- Калибровка аккумулятора
- Шаги калибровки аккумулятора:
- Важно помнить:
- Проверка работы системы
- Проверка соединения с пультом управления
- Проверка работы гироскопа
- Проверка работы моторов
- Проверка работы видеокамеры (при наличии)
- Проверка заряда батареи
- Рекомендации по безопасной эксплуатации
- 1. Будьте осторожны при полете
- 2. Обязательный контроль квадрокоптера
- 3. Следите за высотой полета и дистанцией от пилота
- 4. Будьте готовы к авариям
- Вопрос-ответ
Как настроить квадрокоптер с 6 axis gyro: подробный гайд
1. Подключение
Перед началом настройки, убедитесь что Ваш квадрокоптер находится в рабочем состоянии. Следующим шагом является подключение квадрокоптера к пульту управления. Для этого включите пульт и квадрокоптер, затем подключите их через кабель.
2. Калибровка датчиков
Настройка калибровки датчиков обеспечит точность и стабильность полета квадрокоптера. Для этого необходимо держать квадрокоптер в горизонтальном положении на несколько секунд, чтобы датчики получили точное сигналы об уровне. Затем поверните квадрокоптер на 90 градусов и опять подождите несколько секунд, чтобы датчики увидели изменения. Повторите этот процесс для всех сторон.
3. Настройка угла наклона
Угол наклона определяет наклон квадрокоптера при ускорении или торможении. Для настройки угла необходимо перейти в меню управления и выбрать соответствующий пункт. Рекомендуется начинать с установки низкого угла для более мягкого полета.
4. Настройка чувствительности джойстика
Чувствительность джойстика обеспечивает точность управления квадрокоптером. Для настройки перейдите в меню настроек и выберите пункт «чувствительность джойстика». Рекомендуется настройка на среднюю чувствительность для начинающих пилотов.
5. Тестирование
После настройки все настроенные параметры надо протестировать. Для этого летите на хорошо знакомом вам месте, проверяйте работу всех элементов. Если заметили какие-то недочеты, вернитесь к соответствующим настройкам и попробуйте изменить параметры.
Все эти шаги позволят Вам настроить Ваш квадрокоптер на оптимальные параметры для полета, получить более плавный, стабильный полет и наслаждаться управлением квадрокоптером.
Калибровка гироскопа
Что такое калибровка гироскопа?
Калибровка гироскопа — это процесс настройки квадрокоптера, при котором вы устанавливаете нулевую точку на гироскопе. Это позволяет улучшить стабильность и точность работы квадрокоптера, а также уменьшить риск случайных аварий и ошибок.
Как провести калибровку гироскопа?
Существует несколько способов калибровки гироскопа квадрокоптера, но самый распространенный — это автоматическая калибровка. Для нее нужно:
- Включить квадрокоптер и поставить его на ровную поверхность.
- Открыть приложение для управления квадрокоптером на смартфоне или планшете.
- Нажать на кнопку «калибровка гироскопа» или похожую на нее.
- Дождаться, пока калибровка завершится (обычно это занимает несколько секунд).
После завершения калибровки гироскопа рекомендуется перезапустить квадрокоптер и проверить его работу в воздухе, чтобы убедиться в ее стабильности.
Когда нужно проводить калибровку гироскопа?
Калибровку гироскопа рекомендуется проводить каждый раз, когда вы меняете место полетов или заменяете компоненты квадрокоптера. Также стоит проводить калибровку, если вы заметили, что квадрокоптер ведет себя нестабильно, когда вы пытаетесь его управлять.
Настройка PID регуляторов
Что такое PID регуляторы?
PID (proportional-integral-derivative) — это три алгоритма регулятора, используемые для управленияо скоростью и углом наклона квадрокоптера.
Алгоритмы определяют управление моторами двигателя, чтобы удерживать квадрокоптер устойчивым в воздухе и изменять направление полета.
Процесс настройки PID
Настройка PID регуляторов — это процесс, при котором вы должны изменять три параметра (P, I и D) для оптимизации регулирования каждого мотора квадрокоптера.
Метод настройки PID — это знание, опыт и терпение. При настройке PID регуляторов каждый параметр (P, I и D) настраивается так, чтобы у вас была лучшая скорость, устойчивость и повторяемость полета.
Что делать после настройки PID?
После настройки PID регуляторов, вы можете продолжить настройку других функций, таких как радиуправление, измерение и тестирование.
Применение, которое вы будете использовать квадрокоптер определяет функции, которые необходимы для полета: автономный полет, фотография или видео-съемка и другие.
Настройка системы стабилизации
Одной из важных функций квадрокоптера является система стабилизации. Она позволяет управлять дроном на высоких скоростях и удерживать его в воздухе, препятствуя его падению. Это осуществляется с помощью 6-axis gyro, который замеряет ускорения и угловые скорости и передает информацию контроллеру.
Настройка системы стабилизации квадрокоптера начинается с проверки корректной установки компонентов. Полетный контроллер, моторы и пропеллеры должны быть установлены правильно и жестко закреплены, чтобы избежать смещений и колебаний при полете.
Далее необходимо проверить калибровку 6-axis gyro. Для этого нужно зайти в настройки контроллера и запустить процесс калибровки, следуя инструкциям на экране. После успешной калибровки рекомендуется провести тестовый полет на низкой высоте для проверки стабильности и корректности работы системы стабилизации.
Важно также учитывать особенности полета квадрокоптера при настройке системы стабилизации. При полете на больших высотах и скоростях система стабилизации должна гарантировать устойчивость и точность управления. При маневре квадрокоптера, интенсивных поворотах и изменении высоты важно убедиться, что система стабилизации работает без сбоев и корректно реагирует на команды пилота.
Все настройки системы стабилизации квадрокоптера должны быть проведены аккуратно и тщательно, чтобы гарантировать безопасный и стабильный полет дрона на любых высотах и скоростях.
Настройка радиоаппаратуры
Выбор радиоаппаратуры
Перед началом настройки квадрокоптера с 6 axis gyro необходимо выбрать подходящую радиоаппаратуру. Рекомендуется использовать радиоаппаратуру с минимум четырьмя каналами, чтобы иметь возможность управлять летательным аппаратом во всех направлениях.
Подключение и настройка радиоаппаратуры
Для подключения радиоаппаратуры к квадрокоптеру необходимо выполнить следующие шаги:
1. Проверьте соответствие протокола связи радиоаппаратуры и квадрокоптера.
2. Подключите приемник радиоаппаратуры к контроллеру полета.
3. Установите все рычаги и переключатели на нулевые значения.
4. Включите радиоаппаратуру и проверьте, что приемник получает сигналы от передатчика.
5. Настройте каналы радиоаппаратуры по необходимости с помощью программного обеспечения контроллера полета.
Проверка радиоаппаратуры
После настройки радиоаппаратуры необходимо провести проверку ее работоспособности. Для этого выполните следующие шаги:
1. Проверьте, что все рычаги и переключатели работают корректно и передают сигналы квадрокоптеру.
2. Проверьте, что квадрокоптер реагирует на изменения положения рычагов и переключателей.
3. Проверьте, что настройки радиоаппаратуры соответствуют настройкам контроллера полета.
Следуя этим инструкциям, вы сможете настроить радиоаппаратуру квадрокоптера с 6 axis gyro и проверить ее работоспособность.
Калибровка аккумулятора
Калибровка аккумулятора — важный процесс, который необходимо выполнить перед полетом. Он позволяет корректно определить начальное зарядное состояние аккумулятора и измерить внутреннее сопротивление.
Шаги калибровки аккумулятора:
- Перед подключением аккумулятора убедитесь, что он полностью заряжен.
- Подключите аккумулятор к квадрокоптеру.
- Включите квадрокоптер и контроллер.
- Зайти в меню настройки, выбрать Calibration.
- Выбрать Battery Calibration и нажать старт.
- Дождаться, пока калибровка завершится. Это займет примерно 20-30 секунд.
- Выключите квадрокоптер и отсоедините аккумулятор.
Важно помнить:
- Калибровка аккумулятора следует выполнять каждый раз после замены аккумулятора на новый или если прошло более 10 зарядок.
- Не выполняйте калибровку аккумулятора при низкой температуре окружающей среды.
- Калибровка аккумулятора необходима, чтобы избежать некорректного отображения уровня заряда квадрокоптера и предотвратить возможные аварии во время полета.
Проверка работы системы
Проверка соединения с пультом управления
Перед запуском квадрокоптера необходимо проверить работу связи с пультом управления. Для этого нужно включить пульт и убедиться, что его светодиоды загораются. Затем нужно включить квадрокоптер и убедиться, что светодиоды на дроне мигают в ожидании соединения.
Если связь не установлена, необходимо проверить настройки на пульте управления и убедиться, что квадрокоптер находится в режиме ожидания связи.
Проверка работы гироскопа
Гироскоп — это датчик, который отвечает за стабилизацию и управление квадрокоптером во время полета. Для проверки его работы можно попробовать поднять дрон в воздух и убедиться, что он стабильно держится в воздухе. Также можно попробовать изменять направление движения и убедиться, что квадрокоптер откликается на команды с пульта управления.
Проверка работы моторов
Моторы квадрокоптера отвечают за его подъем и движение в воздухе. Чтобы проверить их работу, необходимо попробовать поднять дрон в воздух и убедиться, что все моторы работают и синхронизированы между собой. Также можно проверить работу моторов, меняя направление движения квадрокоптера с помощью пульта управления.
Проверка работы видеокамеры (при наличии)
Если на квадрокоптере установлена видеокамера, ее работу также необходимо проверить перед полетом. Для этого необходимо убедиться, что камера работает и передает изображение на пульт управления. Также нужно проверить качество видео и его устойчивость во время полета.
Проверка заряда батареи
Для успешного полета важно, чтобы батарея квадрокоптера была полностью заряжена. Перед запуском дрона необходимо проверить уровень заряда батареи с помощью индикатора на пульт управления. Если уровень заряда ниже 50%, рекомендуется зарядить батарею перед вылетом.
Рекомендации по безопасной эксплуатации
1. Будьте осторожны при полете
Перед полетом убедитесь, что батарея квадрокоптера полностью заряжена, совершайте полеты в безветренную погоду и избегайте полетов над многолюдными местами.
Полеты вблизи электроэнергетических линий, зданий, мостов и других сооружений могут привести к неисправности квадрокоптера. Избегайте также полетов вблизи аэродромов и аэропортов.
2. Обязательный контроль квадрокоптера
Перед каждым полетом проверьте квадрокоптер на наличие механических повреждений, убедитесь в исправности всех компонентов и деталей.
Контрольный список может включать следующие пункты: проверку кабелей и коннекторов, состояние объектива камеры, работоспособность аккумулятора.
3. Следите за высотой полета и дистанцией от пилота
Высота полета не должна превышать предельных значений, указанных в инструкции квадрокоптера. Также необходимо следить за дистанцией между квадрокоптером и оператором.
При полете на большую дистанцию рекомендуется использовать систему GPS для точного определения местоположения квадрокоптера.
4. Будьте готовы к авариям
Даже при соблюдении всех рекомендаций и правил эксплуатации, аварии могут произойти. Для минимизации возможных ущербов рекомендуется использовать защиту пропеллеров, а также иметь запасные части и аккумуляторы.
Помните, что безопасность во время полета зависит от правильной эксплуатации и внимательности оператора квадрокоптера.
Вопрос-ответ
![]()
![]()
![]()

NH525 www.neheme.com
www.neheme.com support@neheme.com
support@neheme.com
ЗАПРЕЩЕНО: Специальная конструкция для внутреннего и наружного использования, держите его подальше от препятствий. Этот продукт подходит для использования в помещении (степень ветра не должна превышать 4 балла), пожалуйста, выберите место без препятствий и держитесь подальше от толпы и домашних животных. Не играйте в небезопасных условиях, например, с источником тепла, проводом или источником электроэнергии, избегайте повреждений при столкновении, приземлении, запутывании, поражении электрическим током или неоправданной гибели людей и имущества.
ПРЕДУПРЕЖДЕНИЕ: Получите помощь опытного пилота. Продукты подходят для детей старше 14 лет, вначале у него будут определенные трудности в обучении, прежде чем играть, необходимы предложения или руководство со стороны опытного.
DRONE

Установка защиты пропеллера:
Разложите дрон, а затем подтолкните щитки пропеллера снизу вверх.
ЗАМЕНА НОЖЕЙ
Замена поврежденных лопастей: в вашем наборе есть 2 сменных ротора типа A и B.
Вы увидите буквы «A» и «B», напечатанные на лезвии. Соответственно установите ротор на двигатель.
* Если замена лопастей будет неправильной, дрон не сможет управлять.
- ВАЖНАЯ ИНФОРМАЦИЯ
• Этот продукт НЕ ИГРУШКА. Это может привести к повреждению при неправильном использовании.
Пожалуйста, используйте его, следуя этой инструкции. И не разбирайте этот продукт самостоятельно.
• Перед использованием этой летающей модели необходимо потренироваться.
Пожалуйста, следуйте этой инструкции и практикуйте терпеливо или под руководством опытного пилота.
В противном случае производитель не несет ответственности за любое повреждение продукта или травмы любого человека. - ЗАМЕЧАНИЯ ПО БЕЗОПАСНОСТИ
Летайте только в безопасных местах вдали от других людей. Не управляйте дроном с дистанционным управлением в непосредственной близости от толпы. Дрон с радиоуправлением подвержен авариям, сбоям или повреждению, а также травмам из-за ошибки в работе или радиопомех. Пилоты должны нести ответственность за свое поведение за возможные повреждения или травмы, которые могут произойти во время операции или стать причиной поломки моделей дронов с радиоуправлением.
ПРЕОБРАЗОВАТЕЛЬ
 ПРИМЕЧАНИЕ: Правая рука передатчика — это питание ВКЛ / ВЫКЛ. Если вы вытянете правую руку, контроллер автоматически включится и издаст звуковой сигнал. Индикатор питания загорится. Кроме того, закрытие правой руки контроллера выключит контроллер.
ПРИМЕЧАНИЕ: Правая рука передатчика — это питание ВКЛ / ВЫКЛ. Если вы вытянете правую руку, контроллер автоматически включится и издаст звуковой сигнал. Индикатор питания загорится. Кроме того, закрытие правой руки контроллера выключит контроллер.
СБОРНЫЙ ПУЛЬТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
- Откройте крышку батарейного отсека на задней панели пульта дистанционного управления.
- Вставьте 2 батарейки AAA в соответствии с инструкциями на батарейном отсеке.
(Батарею следует приобретать отдельно, нельзя смешивать старые и новые батареи или батареи разных типов.)

ИНСТРУКЦИЯ ПО БАТАРЕЯМ
- ЗАРЯДКА: Пока аккумулятор заряжается, на USB горит светодиодный индикатор; При полной зарядке светодиод гаснет.
Общее время перезарядки составит около 60 минут. - БЕЗОПАСНОСТЬ: Не следует смешивать батареи разных типов или старые и новые батареи.
- Для зарядки используйте только прилагаемую линию зарядного устройства.
- Соблюдайте полярность, правильно устанавливайте аккумуляторные батареи и следите за тем, чтобы клеммы не были закорочены.
- Аккумуляторы можно заряжать только под присмотром взрослых.
- Не используйте перезаряжаемый аккумулятор.
- Разряженные батарейки следует вынуть из пульта дистанционного управления.
- Используйте батареи в соответствии с требованиями агентства по охране окружающей среды.

ЭКСПЛУАТАЦИЯ И КОНТРОЛЬ
ГОТОВ К ПОЛЕТУ: Убедитесь, что пропеллер установлен правильно и закреплен.
- Поверните правую опору для ноги пульта дистанционного управления, чтобы включить пульт.

- Толкайте рычаг дроссельной заслонки вверх и вниз. Контроллер подключается к дрону.

СПОСОБ ВЗЛЕТА 1
- Поместите дрон в горизонтальное положение, нажмите два рычага вниз до 45 градусов на 2-3 секунды, как показано на рисунке, свет на дроне продолжает мигать, через 2-3 секунды свет остается включенным.

- Чтобы разблокировать дрон, одновременно нажмите на два рычага, как показано на рисунке, на 2-3 секунды.

- Медленно нажмите ручку газа, чтобы взлететь.

СПОСОБ ВЗЛЕТА 2
- Поместите дрон в горизонтальное положение, нажмите два рычага вниз до 45 градусов на 2-3 секунды, как показано на рисунке, свет на дроне продолжает мигать, через 2-3 секунды свет остается включенным.

- Нажмите кнопку взлета с одной кнопкой, дрон начинает взлет.

СПОСОБ ПОСАДКИ 1
 Медленно нажмите на дроссельную заслонку и удерживайте ее на кнопке в течение 2-3 секунд, пока лезвие не перестанет вращаться.
Медленно нажмите на дроссельную заслонку и удерживайте ее на кнопке в течение 2-3 секунд, пока лезвие не перестанет вращаться.
 Нажмите кнопку One Key Landing, дрон медленно приземлится.
Нажмите кнопку One Key Landing, дрон медленно приземлится.
 В случае возникновения нештатной ситуации нажмите кнопку аварийной остановки, и дрон сразу упадет. Это только для экстренных ситуаций.
В случае возникновения нештатной ситуации нажмите кнопку аварийной остановки, и дрон сразу упадет. Это только для экстренных ситуаций.
УПРАВЛЕНИЕ ПОЛЕТОМ И ТОНКАЯ НАСТРОЙКА
| Подъем / спуск | Нажмите левый стик вверх или вниз, чтобы дрон поднимался или опускался. |  |
| Поворот | Нажмите левый стик влево / вправо, дрон будет вращаться влево / вправо. |  |
| Вперед назад | Толкайте правый стик вверх и вниз, чтобы дрон летел вперед и назад. |  |
| Боковая муха | Сдвиньте правый стик влево / вправо, дрон полетит влево / вправо. |  |
| Боковая тонкая настройка | Опустите правый стик, вы услышите «би би» из дрона, нажмите правый стик влево / вправо для обрезки. |  |
| Прямая-обратная точная настройка | Опустите правый стик, вы услышите «би би» из дрона, нажмите правый стик вперед / назад для триммирования. |  |
Безголовый режим: Нажмите кнопку на контроллере, вы услышите звуковой сигнал, затем вы войдете в режим компаса. Когда дрон взлетает, направление, в котором он движется, будет передней стороной. Левая / правая / обратная сторона также распознается по географическому направлению. В режиме без головы светодиодный индикатор будет постоянно мигать.
Один ключ, вернись: Когда дрон взлетает, мы ставим дрон на пол, и задняя часть указывает на игрока. Во время полета нажимаем одну клавишу, чтобы вернуться, дрон прилетит обратно к игроку. Пожалуйста, убедитесь, что при использовании одной клавиши достаточно расстояния, чтобы вернуться к работе. В противном случае это может повредить игроку.
 НАСТРОЙКА КАМЕРЫ
НАСТРОЙКА КАМЕРЫ

Угол наклона камеры можно было отрегулировать вручную на 45 ° вверх и вниз перед полетом.
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ ПРИЛОЖЕНИЯ
- Установить клиент для мобильного телефона
Пожалуйста, отсканируйте соответствующий QR-код, чтобы загрузить приложение https://apps.apple.com/us/app/wifi-uav/id1471622385?l=zh&ls=1
https://apps.apple.com/us/app/wifi-uav/id1471622385?l=zh&ls=1 https://play.google.com/store/apps/details?id=com.lcfld.fldpublic
https://play.google.com/store/apps/details?id=com.lcfld.fldpublic - Добавить устройство
• Включите выключатель питания продукта.
• Войдите в «настройки» телефона и откройте WIFI.
• Найдите WIFI (WIFI_1080P **** / WIFI_4K **** / FLOW_4K _ ****) в списке WIFI, щелкните соединение напрямую без ввода пароля.
• Откройте приложение, щелкните значок запуска, чтобы войти в интерфейс в реальном времени.
• Щелкните значок «Альбом», чтобы войти в интерфейс в реальном времени. - Инструкция по эксплуатации
С помощью значков каждого рабочего интерфейса и интерфейса проигрывателя см. Ниже.

ОБЩАЯ ПРОБЛЕМА И ИНСТРУКЦИЯ ПО РЕШЕНИЮ
| Проблема | Вызывать | Решения |
| Не может взлететь | Аккумулятор квадрокоптера заряжен не полностью | Зарядите аккумулятор дрона |
| Основные лезвия вращаются слишком медленно | Поднимите ручку газа | |
| Основное лезвие не вращается | Основное лезвие слишком туго собрано с двигателем. | Поднимите основную лопасть и сделайте так, чтобы она оставалась в соответствующем состоянии от двигателя. |
| Основное лезвие вращается, но не может взлететь | Батарея дрона разряжена | Зарядите или замените полностью заряженным аккумулятором |
| Деформированные основные лопасти | Заменить основные лезвия | |
| AB лезвие установлено по ошибке | Правильно установите лезвие AB | |
| Моторы не реагируют на дроссельную заслонку. палка, светодиод приемника продолжает мигать |
Батарея дрона разряжена | Полностью зарядите аккумулятор или замените его полностью заряженным аккумулятором. |
| Мотор перестает работать | Застрять во внешних вещах | Вытащить вещи |
| Передатчик не может подключить дрон | Обновите дрон | |
| Двигатель поврежден или линия двигателя оборвана | Замените мотор или проверьте линию внутри | |
| Из-под контроля | Превышение эффективного контрольного расстояния | Расстояние управления более 80 метров |
| Ручка газа не была нажата до конца при завершении проверки частоты, и дрон автоматически поднимается. | Во время регулировки частоты ручку газа нужно тянуть до конца. | |
| Дрон сильно трясся или покачивался вбок | Основное лезвие не в форме | Заменить лезвие |
| Дрон вращается во время пируэта влево / вправо после обрезки | Смешайте триммер передатчика или дрона | Ручной триммер передатчика или Refresh Drone |
| Основное лезвие повреждено | Заменить основное лезвие | |
| Поврежденный мотор | Заменить мотор | |
| Основные лопасти продолжают вращаться после приземления | Триммер дроссельной заслонки случайно поднялся вверх во время полета. | Подтвердите триммер дроссельной заслонки в среднем месте или чуть ниже. |
| Дрон все еще движется вперед после регулировки триммера при зависании | Гироскоп не соответствует уровню | После включения Drone выполните точную настройку для возврата к нулю (Refresh Drone). |
ПРЕДОСТОРОЖНОСТИ
- Расстояние с дистанционным управлением будет сокращено, когда мощность (дрон или передатчик) недостаточна.
- При недостаточной мощности дрона сложно взлетать или высоко летать.
- Если дрон поврежден, пожалуйста, прекратите работу и вовремя отремонтируйте его, иначе это может привести к травме.
- Если вы не используете передатчик в течение длительного времени, извлеките батарейки, чтобы избежать утечки батареи.
- Не роняйте передатчик с большой высоты и не разбивайте его, иначе это сократит срок его службы.
АКСЕССУАРЫ

Документы / Ресурсы
Рекомендации

Официальный дрон NEHEME Webсайт — Никогда не определяй свое видение.
Eachine H8 mini 2.4GHz, 4Ch, 6 Axis Gyro, RC Quadcopter with Headless Mode (RTF) + Испытание водой
Всем доброго времени суток. Впервые обзор этого квадрика на Муське я увидел у товарища simavskij. В те времена он уже был у меня на руках, но обозревал РУ игрушки которые приехали еще раньше. Настал и мой черед рассказать про данный квадрокоптер. Испытывал, облётывал и умудрился его утопить  Об это я расскажу и покажу далее
Об это я расскажу и покажу далее
Итак… Поехали.
Покупал я его на Банггуде. Посылочка ехала где-то до 3х недель… Мне сейчас все посылки где-то так и едут, в трёхнедельный срок.
Скрин моего заказа

Квадрик и вся комплектуха поместилась вот в такой небольшой картонной коробочке с цветной полиграфией.
Длина: 14,5см
Ширина: 13,5см
Высота: 8см
Вес: 195г

Начинаем смотреть какая у него комплектация.
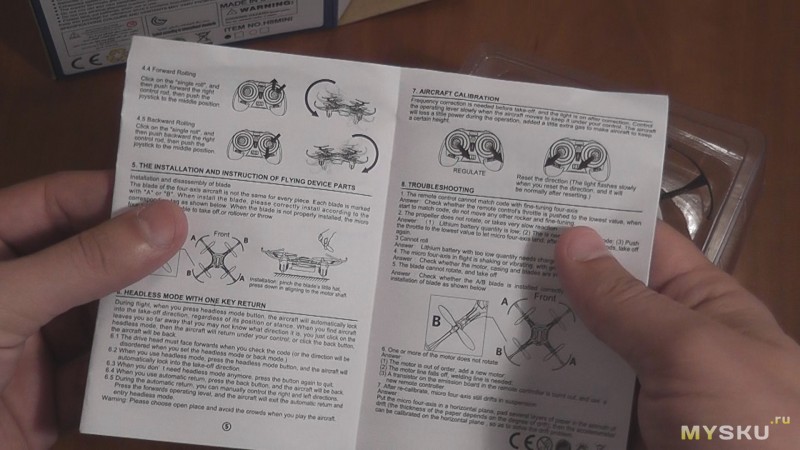
Первым я просмотрел инструкцию, т.к. она выпала из под прозрачного пластикового бокса (в котором находится всё остальное)
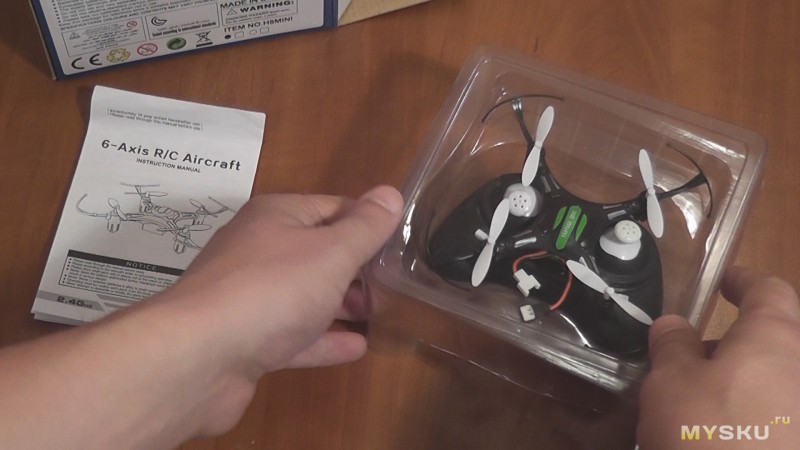
Достаём квадрокоптер Eachine H8 mini

Осмотрев квадрокоптер решил изучить родной аккумулятор

Это — Ли-По аккумулятор, 1S, 3.7В и ёмкостью 150мАч
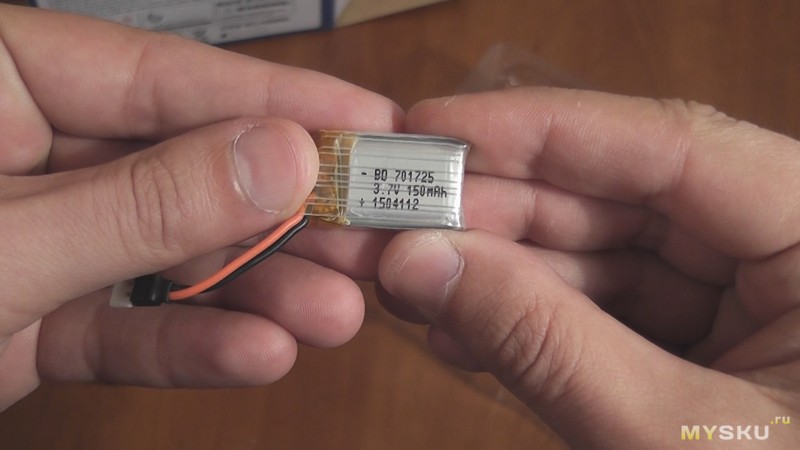
Сразу же кидаю его на весы и замеряю размеры
Длина: 28мм
Ширина: 12мм
Высота: 7мм
Вес: 5,60г

Далее достаю пульт ДУ на 2.4ГГц — пульт как у большинства квадриков подобного масштаба

На дне пластиковой коробки находим кулёчек с ЮСБ-кабелем для зарядки, двумя запасными пропеллерами, отверткой и четырьмя мягкими посадочными ножками

Т.е. полная комплектация выглядит так

Взвешиваем квадрик с установленным аккумулятором и замеряем размеры + замеряем полётное время
Длина: 11см
Ширина: 11см
Высота: 2,8см
Вес: 20,13г
Полётное время: 6мин

Теперь переходим к функционалу пульта ДУ

Пульт (Моде 2) имеет переключатель (Вкл./Выкл питания)
Под правым стиком расположена кнопка для триммирования элеронов (Roll)
Между левым и правым стиками расположена кнопка для триммирования элеватора (Pitch)
Под левым стиком тоже расположена кнопка (у многих пультов она отвечает за триммирование Yaw) но в этом пульте она отвечает за переключение расходов/скорости. Low и High.
Для того чтобы сделать Флип — необходимо нажать правый стик вовнутрь, после чего сдвинуть в ту сторону в которую необходимо сделать флип.
Если нажать левый стик вовнутрь — включится функция авто-возврата. Чтобы из неё выйти достаточно сдвинуть правый стик в любом направлении. После чего, квадрокоптер автоматически перейдет в Headless режим. Для выхода из Headless режима необходимо еще раз нажать левый стик вовнутрь.

Рекалибровка гироскопов — оба стика сдвинуть в правый-нижний угол
Сброс направления — оба стика сдвинуть в левый-нижний угол.
Для питания пульта ДУ необходимы 3 ААА батарейки

Квадрокоптер имеет довольно яркую светодиодную подсветку

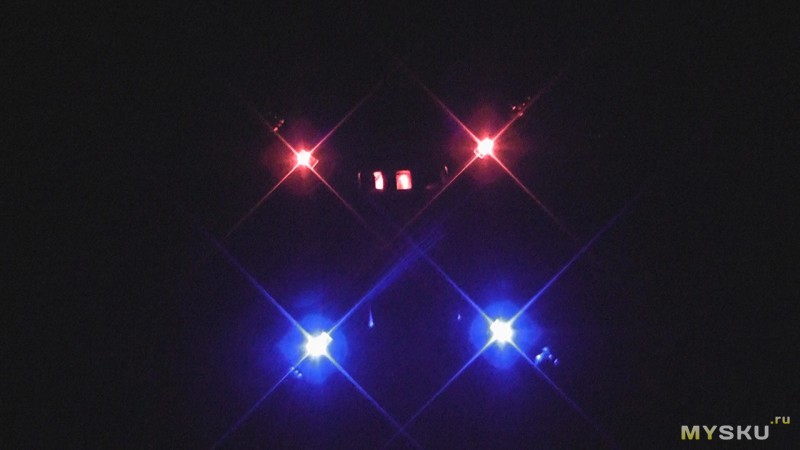
Когда светодиодная подсветка начинает мигать — это обозначает что аккумулятор почти разряжен. Полётного времени остается около 10-15 секунд.
Время зарядки аккумулятора — до 1го часа
Когда зарядка завершена красный диод в ЮСБ-кабеле тухнет

Переходим к полётам






Тут фотка на внимательность — «Найди кота»
Кто не сможет найти — могут посмотреть подсказку в видео (в самом низу обзора)

Перед тем как летать над водой я проверил достаточно ли еще тяги, не сел ли аккумулятор…

И он летал еще нормально около 10 сек пока не превратился в водомерку


Пока я подбежал к воде, квадрик превратился в подводную лодку. На прощание он мне что-то тихо пробулькал

Хорошо что было не глубоко, около 70-80см… Пошарив по дну рукой, через несколько минут я достал его Диодики светились…
Потряс его и повесил на ветке сушиться, параллельно протёр аккум и воткнул его заряжаться в свой старый нонэйм Павер банк.


Пол-часа спустя я решил что квадрик высох и аккум немного зарядился… Проверка после купания.



Подведём итоги
+ Не большой, но и не мелочь
+ Довольно прочный
+ Имеет защиту
+ Цена (наверно самый дешёвый квадрик из ныне существующих)
+ Электроника хорошо покрыта лаком (при намокании и полном погружении ничего не сгорело)
— Чересчур чувствителен по YAW
Более подробнее про этот квадрокптер можно посмотреть в видео. Распаковка, комплектация, описание пульта, взвешивания, полёты, поиск кота, купание…
Спасибо за внимание!
Содержание
- Как организовать связь по каналу wi-fi и как подключить камеру квадрокоптера к телефону
- Прямая трансляция видео с БПЛА
- Как подключить телефон к камере квадрокоптера Syma X5SW
- Плюсы и минусы подключения через канал Wi-Fi

Купить дрон и комплектующие по выгодной цене.
Как подключить квадрокоптер к телефону, к нам очень часто обращаются пользователи с этим вопросом. Актуальность этой задачи подтверждается тем, что хотя большинство современных дронов комплектуется RC контроллерами, но есть целый ряд моделей, связь с которыми поддерживается через смартфон и специальные приложения к нему.
Чаще всего для работы с БПЛА подобного типа применяется канал wi-fi. Этот способ управления широко используются при полетах на небольшие расстояния, создавая новые возможности и идеи для моделей потребительского класса. Отметим, что мобильные устройства применяются не только для управления летательным аппаратом, но и для его настройки, активации различных режимов полета, работы с подвесом и видеокамерой.
Как организовать связь по каналу wi-fi и как подключить камеру квадрокоптера к телефону
Подключить квадрокоптер к телефону через wi-fi точку довольно просто. Методика включает всего из нескольких шагов:
- Скачайте из магазина приложений (App Store для iPhone или Google Play для Android) в память своего телефона (планшета) мобильное приложение, ориентированное на работу с вашим летательным аппаратом. QR-код для скачивания чаще всего приводится в инструкции по эксплуатации, но может быть нанесен на упаковку дрона;
- Активизируйте на смартфоне канал wi-fi;
- Включите квадрокоптер;
- Обычным образом подключитесь к раздаваемому летательным аппаратом каналу wi-fi. Ввод пароля для выполнения этой операции обычно не нужен;
- Запустите загруженное ранее приложение. На экране появятся виртуальные стики, кнопки и служебные мнемограммы. Если летательный аппарат оборудован полетной камерой, то фоном для всей этой информации будет поступающее с нее изображение;
- Теперь можно запускать двигатели и отправляться в полет, при условии если вы умеете им управлять.
Прямая трансляция видео с БПЛА
Большинство дронов с камерой обладают способностью к передаче потокового видео. Этот механизм универсален и хорошо подходит для трансляции спортивных состязаний, обеспечения общественной безопасности, мониторинга скоплений людей в реальном масштабе времени и других задач.
Бюджетные беспилотники с камерой обеспечивают передачу видео по каналу wi-fi. Приемником служит мобильное устройство (планшет или смартфон). Это удобно тем, что один из этих гаджетов у оператора обычно уже есть. Таким образом, организация связи с квадрокоптером по wi-fi дает потребителю существенную экономию средств при приемлемом качестве воспроизведения.
На больших дальностях полета такой способ передачи может вносить временную задержку в 2-3 секунды. Впрочем, обычно дроны с wi-fi управлением не способны улетать от пилота на значительное расстояние.
Как подключить телефон к камере квадрокоптера Syma X5SW
В качестве примера рассмотрим методику подключения смартфона к видеоаппаратуре коптера Syma X5SW. Камера этой машины способна снимать видео в формате 640×480 pix при 30 fps. Фотографии имеют то же разрешение. Связь с установленным на кронштейне ПДУ смартфоном поддерживается через антенну встроенного в видеоаппаратуру wi-fi передатчика.
Дрон может улетать от пульта управления на 120 м, но трансляция видео прерывается уже на дальностях в 30-40 м. Производитель утверждает, что передача видео выполняется в реальном масштабе времени. Опыт показывает, что это утверждение ошибочно. В видеоканале присутствуют явные временные задержки.
Теперь рассмотрим собственно процедуру привязки
 Прежде всего, пилот должен скачать на свой смартфон приложение SYMA FPV. Соответствующий QR-код приложения можно найти на упаковке дрона или в инструкции к нему. Код зависит от того, под управлением какой операционной системой работает смартфон – ОС iOS или Android. Владельцы телефонов с ОС Android могут столкнуться с весьма неприятной проблемой – приложение Syma FPV поддерживается только версиями Android 4.1 или выше.
Прежде всего, пилот должен скачать на свой смартфон приложение SYMA FPV. Соответствующий QR-код приложения можно найти на упаковке дрона или в инструкции к нему. Код зависит от того, под управлением какой операционной системой работает смартфон – ОС iOS или Android. Владельцы телефонов с ОС Android могут столкнуться с весьма неприятной проблемой – приложение Syma FPV поддерживается только версиями Android 4.1 или выше.
Если установка программы произошла, оператор может включить дрон и заняться его привязкой. На создание собственной точки доступа полетной камере понадобится до 30 секунд, после чего оператор может начинать процедуру подключения к телефону. Он выбирает в своем смартфоне меню настроек, находит в нем раздел wi-fi и самостоятельно подключается к сети, которая значится в открывшемся на экране списке под именем FPV wi-fi.
Если появилось сообщение об успешном завершении операции, пилот выходит из меню настроек, находит в общем списке программ приложение SYMA FPV и открывает его. Появляется заставка, на которой нужно нажать кнопку START. Реакцией на эти действия станет появление на экране живого изображения, поступающего по каналу wi-fi от бортовой камеры дрона.
На этом фоне размещаются пять иконок, благодаря которым оператор получает право записывать фото и видео, просматривать полученные результаты в памяти телефона, контролировать уровень сигнала wi-fi и входить из приложения. В левом нижнем углу экрана располагается индикатор, фиксирующий продолжительность видеозаписи.
Советуем почитать рубрику «Интересно». Множество советов по эксплуатации дронов.
Плюсы и минусы подключения через канал Wi-Fi
Достоинства:
- Экран смартфона служит для передачи видео в реальном масштабе времени;
- Весь полетный функционал дрона контролируется простыми прикосновениями к экрану;
- Для управления полетом допускается использовать встроенный гироскоп;
- Смартфон создает привычную платформу для большинства молодых пользователей.
Недостатки:
- Слабая дальность управления;
- Приложения для смартфона необходимо регулярно обновлять.
Будем благодарны вам, если поделитесь с друзьями:

Вас приветствует команда mykvadrocopter.ru! Наше хобби — дроны. Здесь мы описываем их модели, характеристики, делимся новостями и выкладываем инструкции по применению. Вступайте в наше сообщество любителей дронов в Контакте.
ВНИМАНИЕ!
• Заряжайте аккумулятор модели только прилагаемым к UFO зарядным устройством. Не
пытайтесь заряжать этим устройством другие аккумуляторы.
• При подключении аккумулятора не прилагайте чрезмерных усилий. Разъем аккумулятора
устроен таким образом, что позволяет легко подключить аккумулятор только в одном
положении, с соблюдением полярности. Всегда соблюдайте полярность подключения
зарядного устройства и аккумулятора.
• Для зарядки всегда извлекайте заряжаемый Li-Pol аккумулятор из модели.
• Аккумулятор в процессе зарядки должен находиться на несгораемой поверхности, на
максимально возможном расстоянии друг от зарядного устройства, вдали от
воспламеняющихся предметов.
• Никогда не оставляйте аккумулятор во время зарядки без присмотра.
• Не замыкайте контакты аккумулятора. Не разбирайте и не допускайте сильного нагрева (выше
45градусов Цельсия), и ударов аккумулятора.
• Всегда отключайте аккумулятор и зарядное устройство сразу после окончания процесса
зарядки.
• Не допускайте глубокий разряд (ниже 3В на элемент) или перезаряд (выше 4.2В на элемент) Li-
Pol аккумулятора. Храните Li-Pol аккумуляторы вне модели, в специальных, несгораемых
пакетах, вдали от воспламеняющихся предметов.
• При возникновении необычного запаха, изменения формы или повреждения немедленно
утилизируйте аккумулятор в соответствии с действующим местным законодательством.
• Никогда не бросайте батареи и аккумуляторы в мусоропровод, воду или огонь. Не пытайтесь
разбирать или модернизировать элементы питания.
• Если аккумулятор поврежден, а его содержимое попало на одежду или открытые части тела,
немедленно промойте это место водой и обратитесь к доктору.
ВНИМАНИЕ:
Всегда отсоединяйте аккумулятор, сразу после зарядки.
Если при подключении не загорается светодиод — это свидетельствует о нарушении контакта в
подключении, недостаточной энергии источника питания, либо о повреждении зарядного кабеля.
Никогда не заряжайте аккумулятор сразу после полета, дайте ему остыть.
Всегда контролируйте процесс зарядки, при появлении посторонних запахов, изменении формы
или значительном, выше 45градусов Цельсия, нагреве любого из элементов, немедленно
прекратите процесс до выяснения причин.
ПОДГОТОВКА К ПОЛЕТУ
1. Включите питание передатчика — индикатор будет светится. Переместите ручку газа до упора от
себя, а затем до упора на себя – индикатор станет мигать, указывая, что передатчик готов к работе.
2. Вставьте Li-Pol аккумулятор в отсек модели. Установите UFO на ровную горизонтальную
поверхность.
3. Соблюдая полярность, соедините разъем Li-Pol аккумулятора с разъемом модели. Красный
светодиод будет мигать быстро, а затем медленно, подтверждая, что UFO готово к полету.
Подключайте аккумулятор, расположив UFO на идеальной горизонтальной поверхности!
ВНИМАНИЕ! В первые 3 секунды после подключения аккумулятора не шевелите модель! В это
время электроника модели автоматически калибруется, это позволяет до минимума сократить
потребность в триммировании при полете модели.
14+
GyjwffM/m eM rm stm s
r(720P)
4-CHANNEL PRESSURE HOVERING HEIGHT-ADJUSTMENT REMOTE CONTROL 6-AXIS FLYCOPTER
ИНСТРУКЦИЯ
ДЕЙСТВУЮЩИЕ СТАНДАРТЫ : GB/T26701-2011
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
• Используется 4-осевая конструкция, что позволяет квадрокоптеру
быть еще более гибким, быстрым, и иметь относительно сильную
ветроустойчивость. Также он может выполнять полеты как в
помещении, так и за его пределами.
• Встроенный 6-осевой гироскоп стабилизатор ориентации,
обеспечивает точное позиционирование в воздухе.
• В конструкции используются модульные конструкции, упрощая
сборку, ремонт и обслуживание квадрокоптера.
• Возможность трехмерного переворота на 360 ° и функция fling-flying.
• Функция Headless позволяет легко вызвать квадрокоптер назад.
• Новая функция регулировки высоты зависания.
Содержание
- Управление квадрокоптером — основные особенности
- Пульт управления
- Выбор режима на дроне
- Основные правила полёта
- Первый вылет
- Зависаем в воздухе
- Возвращаемся в исходное место
- Вращение по оси
- Взлетите и пролетите круг
- Делаем «восьмерку»
- Видео
Управление квадрокоптером — основные особенности
Пульт управления
Принцип работы одинаков для всех моделей. На корпусе пульта дистанционного управления расположены два рычага — левый и правый. Они используются для управления устройством.
Как пользоваться пультом дистанционного управления:
- Увеличение высоты — левый рычаг, поворот наверх
- Опускание устройства — левый рычаг, поворот вниз
- Круговое вращение — левый рычаг, боковое вращение
- Носовое управление — правый рычаг, вверх и вниз.
- Наклоните тело — правая рука, повернитесь в сторону.

Некоторые современные модели также имеют возможность управления с помощью приложения для смартфона. В этом случае сам дрон и телефон должны быть подключены через WiFi.

Выбор режима на дроне
При использовании беспилотника, определитесь с режимом полета. Большинство четырёхколёсных вертолётов имеют три основные программы. В том числе:
- модуль GPS
Режим удержания GPS-режима — работает при непосредственном участии модуля GPS. Этот режим полета управляется бортовой электроникой, отвечающей за стабилизацию квадрокоптера. Функция определения местоположения, реализованная с помощью GPS, активна. Беспилотник фиксируется в координатной точке и позволяет ему точно парить без дрейфа, даже если на него воздействуют внешние факторы, такие как ветер. Большая награда в аэрофотосъемке, так как она освобождает пилота от постоянного контроля высоты беспилотника, поэтому он может сконцентрировать свое внимание на получении высококачественных фото/видеосъемок.

Наиболее выгодным режимом для начинающих является активация модуля GPS. Установите маршрут, по которому будет следовать устройство. Беспилотник явно следует за ним. Другими словами, это автопилот. Однако навигация присутствует не во всех моделях.
- Стабильный полёт
«Режим самонивелирования» (Горизонтный режим) — В этих режимах активна электроника, отвечающая за стабилизацию беспилотника (гироскоп, акселерометр), затраты (индикаторы скорости) ограничены. Эти режимы хорошо подходят для обучения пилотов.
Режим удержания высоты — Этот режим полета управляется бортовой электроникой, которая отвечает за стабилизацию беспилотника, активирована функция поддержания высоты, реализованная штурманом (барометром). Во время полета в этом режиме, если пилот отпустит палки/джойстики, квад не упадет, как это может случиться в упомянутых выше режимах полета, а зависнет на высоте, занимаемой во время полета. Пилот должен будет управлять горизонтальным смещением/наклоном коптера, например, из-за ветра. Режим будет по достоинству оценен новичками.
При записи видео или фотосъемке используйте режим стабильного полета. Его активация активирует встроенный датчик акселерометра. Его задача — поддерживать заданную высоту на автоматическом уровне. Ручной полет означает управление беспилотником самостоятельно. Это самый интересный режим, но здесь нельзя обойтись без навыков. Как научиться управлять беспилотником вручную описано ниже.
Основные правила полёта
Здесь мы говорим о том, каким правилам следует следовать до и во время вашего первого полета. Безопасность превыше всего!
- Выберите хороший, безветренный день для полета.
- Место полета должно быть большим, открытым, без зданий и линий электропередач.
- Убедитесь, что в зоне запуска и полета нет людей, животных или имущества.
- Перед запуском проверьте беспилотный летательный аппарат на наличие дефектов/повреждений, неправильно/небезопасно смонтированных гребных винтов, защитных ограждений гребных винтов, камер и т.д.
- Постарайтесь свести к минимуму отвлекающие факторы во время полета, например, рекомендуется переключить мобильный телефон в бесшумный режим и т.д.
Первый вылет
Как только безопасность будет обеспечена, вы сможете перейти к практическим полетам. Начните с простого и проработайте сначала следующее:
- Тренируйтесь взлетать и парить в воздухе высотой до двух метров, а затем приземляться.
- Выполняйте короткие перелеты из пункта «А» в пункт «В» с последующей посадкой.
- Достичь уверенности в стабильном пилотировании при достижении первых двух баллов.

Зависаем в воздухе
Не поднимайте квадрокоптер слишком высоко. Для начала достаточно одного метра в высоту. Умение совершенствуется, когда беспилотник остается в воздухе в течение 30 секунд без каких-либо проблем.

Возвращаемся в исходное место
Возвращение к тому, с чего ты начал, — это вызов. Поднимите устройство в воздух и направьте его в сторону. После некоторого времени полета, спускайся вниз. Попробуйте вернуться в исходную позицию. Повторяйте этот процесс до тех пор, пока не добьетесь успеха.

Вращение по оси
Это довольно сложная точка для новичков. С помощью левой палки можно поворачивать квадрокоптер горизонтально по оси, наклоняя его влево или вправо. Сложность заключается в визуальном управлении, так как всегда нужно помнить ориентацию беспилотника — какая сторона сейчас перед нами и не путать ту сторону, на которой он будет летать.
Если вы поворачиваете беспилотник через экран телефона (с помощью видео) или шлема, то это просто и понятно.
Взлетите и пролетите круг
Пришло время для более сложного полета. Вы должны взлететь на определенной высоте и лететь прямо, затем плавно повернуть в одну сторону, чтобы пролететь по круговой местности. Потом в обратном направлении.
После нескольких кругов попробуйте острые углы.
Делаем «восьмерку»
Суть в том, что нарисуйте воображаемую фигуру в небе с помощью квадрокоптера. Это одна из самых сложных задач. По окончании работы поверните устройство без остановки в форме восьмерки. Постепенно увеличивайте скорость. Не выходите за линию фигуры и не спускайтесь с указанной высоты.

Видео
Источники
- https://smart-planets.ru/kvadrokopter/kak-upravlyat-kvadrokopterom/
- https://SmartBobr.ru/quadcopters/kak-upravlyat-kvadrokopterom/
- https://DronGeek.ru/novichkam/kak-upravlyat-kvadrokopterom
- https://Dronomania.ru/faq/kak-upravlyat-kvadrokopterom.html
- https://ProFPV.ru/kak-letat-na-kvadrokoptere-s-chego-nach/
Eachine H8 mini 2.4GHz, 4Ch, 6 Axis Gyro, RC Quadcopter with Headless Mode (RTF) + Испытание водой
Всем доброго времени суток. Впервые обзор этого квадрика на Муське я увидел у товарища simavskij. В те времена он уже был у меня на руках, но обозревал РУ игрушки которые приехали еще раньше. Настал и мой черед рассказать про данный квадрокоптер. Испытывал, облётывал и умудрился его утопить Об это я расскажу и покажу далее
Итак… Поехали.
Покупал я его на Банггуде. Посылочка ехала где-то до 3х недель… Мне сейчас все посылки где-то так и едут, в трёхнедельный срок.
Скрин моего заказа
Квадрик и вся комплектуха поместилась вот в такой небольшой картонной коробочке с цветной полиграфией.
Длина: 14,5см
Ширина: 13,5см
Высота: 8см
Вес: 195г
Начинаем смотреть какая у него комплектация.
Первым я просмотрел инструкцию, т.к. она выпала из под прозрачного пластикового бокса (в котором находится всё остальное)
Достаём квадрокоптер Eachine H8 mini
Осмотрев квадрокоптер решил изучить родной аккумулятор
Это — Ли-По аккумулятор, 1S, 3.7В и ёмкостью 150мАч
Сразу же кидаю его на весы и замеряю размеры
Длина: 28мм
Ширина: 12мм
Высота: 7мм
Вес: 5,60г
Далее достаю пульт ДУ на 2.4ГГц — пульт как у большинства квадриков подобного масштаба
На дне пластиковой коробки находим кулёчек с ЮСБ-кабелем для зарядки, двумя запасными пропеллерами, отверткой и четырьмя мягкими посадочными ножками
Т.е. полная комплектация выглядит так
Взвешиваем квадрик с установленным аккумулятором и замеряем размеры + замеряем полётное время
Длина: 11см
Ширина: 11см
Высота: 2,8см
Вес: 20,13г
Полётное время: 6мин
Теперь переходим к функционалу пульта ДУ
Пульт (Моде 2) имеет переключатель (Вкл./Выкл питания)
Под правым стиком расположена кнопка для триммирования элеронов (Roll)
Между левым и правым стиками расположена кнопка для триммирования элеватора (Pitch)
Под левым стиком тоже расположена кнопка (у многих пультов она отвечает за триммирование Yaw) но в этом пульте она отвечает за переключение расходов/скорости. Low и High.
Для того чтобы сделать Флип — необходимо нажать правый стик вовнутрь, после чего сдвинуть в ту сторону в которую необходимо сделать флип.
Если нажать левый стик вовнутрь — включится функция авто-возврата. Чтобы из неё выйти достаточно сдвинуть правый стик в любом направлении. После чего, квадрокоптер автоматически перейдет в Headless режим. Для выхода из Headless режима необходимо еще раз нажать левый стик вовнутрь.
Рекалибровка гироскопов — оба стика сдвинуть в правый-нижний угол
Сброс направления — оба стика сдвинуть в левый-нижний угол.
Для питания пульта ДУ необходимы 3 ААА батарейки
Квадрокоптер имеет довольно яркую светодиодную подсветку
Когда светодиодная подсветка начинает мигать — это обозначает что аккумулятор почти разряжен. Полётного времени остается около 10-15 секунд.
Время зарядки аккумулятора — до 1го часа
Когда зарядка завершена красный диод в ЮСБ-кабеле тухнет
Переходим к полётам
Тут фотка на внимательность — «Найди кота»
Кто не сможет найти — могут посмотреть подсказку в видео (в самом низу обзора)
Перед тем как летать над водой я проверил достаточно ли еще тяги, не сел ли аккумулятор…
И он летал еще нормально около 10 сек пока не превратился в водомерку
Пока я подбежал к воде, квадрик превратился в подводную лодку. На прощание он мне что-то тихо пробулькал
Хорошо что было не глубоко, около 70-80см… Пошарив по дну рукой, через несколько минут я достал его Диодики светились…
Потряс его и повесил на ветке сушиться, параллельно протёр аккум и воткнул его заряжаться в свой старый нонэйм Павер банк.
Пол-часа спустя я решил что квадрик высох и аккум немного зарядился… Проверка после купания.
Подведём итоги
+ Не большой, но и не мелочь
+ Довольно прочный
+ Имеет защиту
+ Цена (наверно самый дешёвый квадрик из ныне существующих)
+ Электроника хорошо покрыта лаком (при намокании и полном погружении ничего не сгорело)
— Чересчур чувствителен по YAW
Более подробнее про этот квадрокптер можно посмотреть в видео. Распаковка, комплектация, описание пульта, взвешивания, полёты, поиск кота, купание…
Спасибо за внимание!
Квадрокоптеры стали популярным развлечением для людей всех возрастов, но, чтобы получить полный контроль над устройством, необходимо настроить его с помощью 6-axis gyro. Это небольшой инструмент, который позволяет квадрокоптеру стабильно летать в воздухе и управлять им в воздухе. Но как его настроить и на что обратить внимание?
В этой статье вы найдете подробный гайд о том, как правильно настроить квадрокоптер с 6-axis gyro. Вы узнаете, как настроить датчики, стабилизаторы и другие элементы квадрокоптера, чтобы получить максимальную стабильность и управляемость при полете. Мы расскажем о простых шагах, которые нужно выполнить, чтобы начать полеты и наслаждаться ими в полной мере.
Пошаговая инструкция в данной статье позволит вам быстро и легко освоить настройку квадрокоптера с 6-axis gyro и получить максимум удовольствия от полетов. Кроме того, мы расскажем об основных ошибках, которые допускают начинающие пользователи, и как их избежать.
Содержание
- Как настроить квадрокоптер с 6 axis gyro: подробный гайд
- 1. Подключение
- 2. Калибровка датчиков
- 3. Настройка угла наклона
- 4. Настройка чувствительности джойстика
- 5. Тестирование
- Калибровка гироскопа
- Что такое калибровка гироскопа?
- Как провести калибровку гироскопа?
- Когда нужно проводить калибровку гироскопа?
- Настройка PID регуляторов
- Что такое PID регуляторы?
- Процесс настройки PID
- Что делать после настройки PID?
- Настройка системы стабилизации
- Настройка радиоаппаратуры
- Выбор радиоаппаратуры
- Подключение и настройка радиоаппаратуры
- Проверка радиоаппаратуры
- Калибровка аккумулятора
- Шаги калибровки аккумулятора:
- Важно помнить:
- Проверка работы системы
- Проверка соединения с пультом управления
- Проверка работы гироскопа
- Проверка работы моторов
- Проверка работы видеокамеры (при наличии)
- Проверка заряда батареи
- Рекомендации по безопасной эксплуатации
- 1. Будьте осторожны при полете
- 2. Обязательный контроль квадрокоптера
- 3. Следите за высотой полета и дистанцией от пилота
- 4. Будьте готовы к авариям
- Вопрос-ответ
1. Подключение
Перед началом настройки, убедитесь что Ваш квадрокоптер находится в рабочем состоянии. Следующим шагом является подключение квадрокоптера к пульту управления. Для этого включите пульт и квадрокоптер, затем подключите их через кабель.
2. Калибровка датчиков
Настройка калибровки датчиков обеспечит точность и стабильность полета квадрокоптера. Для этого необходимо держать квадрокоптер в горизонтальном положении на несколько секунд, чтобы датчики получили точное сигналы об уровне. Затем поверните квадрокоптер на 90 градусов и опять подождите несколько секунд, чтобы датчики увидели изменения. Повторите этот процесс для всех сторон.
3. Настройка угла наклона
Угол наклона определяет наклон квадрокоптера при ускорении или торможении. Для настройки угла необходимо перейти в меню управления и выбрать соответствующий пункт. Рекомендуется начинать с установки низкого угла для более мягкого полета.
4. Настройка чувствительности джойстика
Чувствительность джойстика обеспечивает точность управления квадрокоптером. Для настройки перейдите в меню настроек и выберите пункт «чувствительность джойстика». Рекомендуется настройка на среднюю чувствительность для начинающих пилотов.
5. Тестирование
После настройки все настроенные параметры надо протестировать. Для этого летите на хорошо знакомом вам месте, проверяйте работу всех элементов. Если заметили какие-то недочеты, вернитесь к соответствующим настройкам и попробуйте изменить параметры.
Все эти шаги позволят Вам настроить Ваш квадрокоптер на оптимальные параметры для полета, получить более плавный, стабильный полет и наслаждаться управлением квадрокоптером.
Калибровка гироскопа
Что такое калибровка гироскопа?
Калибровка гироскопа — это процесс настройки квадрокоптера, при котором вы устанавливаете нулевую точку на гироскопе. Это позволяет улучшить стабильность и точность работы квадрокоптера, а также уменьшить риск случайных аварий и ошибок.
Как провести калибровку гироскопа?
Существует несколько способов калибровки гироскопа квадрокоптера, но самый распространенный — это автоматическая калибровка. Для нее нужно:
- Включить квадрокоптер и поставить его на ровную поверхность.
- Открыть приложение для управления квадрокоптером на смартфоне или планшете.
- Нажать на кнопку «калибровка гироскопа» или похожую на нее.
- Дождаться, пока калибровка завершится (обычно это занимает несколько секунд).
После завершения калибровки гироскопа рекомендуется перезапустить квадрокоптер и проверить его работу в воздухе, чтобы убедиться в ее стабильности.
Когда нужно проводить калибровку гироскопа?
Калибровку гироскопа рекомендуется проводить каждый раз, когда вы меняете место полетов или заменяете компоненты квадрокоптера. Также стоит проводить калибровку, если вы заметили, что квадрокоптер ведет себя нестабильно, когда вы пытаетесь его управлять.
Настройка PID регуляторов
Что такое PID регуляторы?
PID (proportional-integral-derivative) — это три алгоритма регулятора, используемые для управленияо скоростью и углом наклона квадрокоптера.
Алгоритмы определяют управление моторами двигателя, чтобы удерживать квадрокоптер устойчивым в воздухе и изменять направление полета.
Процесс настройки PID
Настройка PID регуляторов — это процесс, при котором вы должны изменять три параметра (P, I и D) для оптимизации регулирования каждого мотора квадрокоптера.
Метод настройки PID — это знание, опыт и терпение. При настройке PID регуляторов каждый параметр (P, I и D) настраивается так, чтобы у вас была лучшая скорость, устойчивость и повторяемость полета.
Что делать после настройки PID?
После настройки PID регуляторов, вы можете продолжить настройку других функций, таких как радиуправление, измерение и тестирование.
Применение, которое вы будете использовать квадрокоптер определяет функции, которые необходимы для полета: автономный полет, фотография или видео-съемка и другие.
Настройка системы стабилизации
Одной из важных функций квадрокоптера является система стабилизации. Она позволяет управлять дроном на высоких скоростях и удерживать его в воздухе, препятствуя его падению. Это осуществляется с помощью 6-axis gyro, который замеряет ускорения и угловые скорости и передает информацию контроллеру.
Настройка системы стабилизации квадрокоптера начинается с проверки корректной установки компонентов. Полетный контроллер, моторы и пропеллеры должны быть установлены правильно и жестко закреплены, чтобы избежать смещений и колебаний при полете.
Далее необходимо проверить калибровку 6-axis gyro. Для этого нужно зайти в настройки контроллера и запустить процесс калибровки, следуя инструкциям на экране. После успешной калибровки рекомендуется провести тестовый полет на низкой высоте для проверки стабильности и корректности работы системы стабилизации.
Важно также учитывать особенности полета квадрокоптера при настройке системы стабилизации. При полете на больших высотах и скоростях система стабилизации должна гарантировать устойчивость и точность управления. При маневре квадрокоптера, интенсивных поворотах и изменении высоты важно убедиться, что система стабилизации работает без сбоев и корректно реагирует на команды пилота.
Все настройки системы стабилизации квадрокоптера должны быть проведены аккуратно и тщательно, чтобы гарантировать безопасный и стабильный полет дрона на любых высотах и скоростях.
Настройка радиоаппаратуры
Выбор радиоаппаратуры
Перед началом настройки квадрокоптера с 6 axis gyro необходимо выбрать подходящую радиоаппаратуру. Рекомендуется использовать радиоаппаратуру с минимум четырьмя каналами, чтобы иметь возможность управлять летательным аппаратом во всех направлениях.
Подключение и настройка радиоаппаратуры
Для подключения радиоаппаратуры к квадрокоптеру необходимо выполнить следующие шаги:
1. Проверьте соответствие протокола связи радиоаппаратуры и квадрокоптера.
2. Подключите приемник радиоаппаратуры к контроллеру полета.
3. Установите все рычаги и переключатели на нулевые значения.
4. Включите радиоаппаратуру и проверьте, что приемник получает сигналы от передатчика.
5. Настройте каналы радиоаппаратуры по необходимости с помощью программного обеспечения контроллера полета.
Проверка радиоаппаратуры
После настройки радиоаппаратуры необходимо провести проверку ее работоспособности. Для этого выполните следующие шаги:
1. Проверьте, что все рычаги и переключатели работают корректно и передают сигналы квадрокоптеру.
2. Проверьте, что квадрокоптер реагирует на изменения положения рычагов и переключателей.
3. Проверьте, что настройки радиоаппаратуры соответствуют настройкам контроллера полета.
Следуя этим инструкциям, вы сможете настроить радиоаппаратуру квадрокоптера с 6 axis gyro и проверить ее работоспособность.
Калибровка аккумулятора
Калибровка аккумулятора — важный процесс, который необходимо выполнить перед полетом. Он позволяет корректно определить начальное зарядное состояние аккумулятора и измерить внутреннее сопротивление.
Шаги калибровки аккумулятора:
- Перед подключением аккумулятора убедитесь, что он полностью заряжен.
- Подключите аккумулятор к квадрокоптеру.
- Включите квадрокоптер и контроллер.
- Зайти в меню настройки, выбрать Calibration.
- Выбрать Battery Calibration и нажать старт.
- Дождаться, пока калибровка завершится. Это займет примерно 20-30 секунд.
- Выключите квадрокоптер и отсоедините аккумулятор.
Важно помнить:
- Калибровка аккумулятора следует выполнять каждый раз после замены аккумулятора на новый или если прошло более 10 зарядок.
- Не выполняйте калибровку аккумулятора при низкой температуре окружающей среды.
- Калибровка аккумулятора необходима, чтобы избежать некорректного отображения уровня заряда квадрокоптера и предотвратить возможные аварии во время полета.
Проверка работы системы
Проверка соединения с пультом управления
Перед запуском квадрокоптера необходимо проверить работу связи с пультом управления. Для этого нужно включить пульт и убедиться, что его светодиоды загораются. Затем нужно включить квадрокоптер и убедиться, что светодиоды на дроне мигают в ожидании соединения.
Если связь не установлена, необходимо проверить настройки на пульте управления и убедиться, что квадрокоптер находится в режиме ожидания связи.
Проверка работы гироскопа
Гироскоп — это датчик, который отвечает за стабилизацию и управление квадрокоптером во время полета. Для проверки его работы можно попробовать поднять дрон в воздух и убедиться, что он стабильно держится в воздухе. Также можно попробовать изменять направление движения и убедиться, что квадрокоптер откликается на команды с пульта управления.
Проверка работы моторов
Моторы квадрокоптера отвечают за его подъем и движение в воздухе. Чтобы проверить их работу, необходимо попробовать поднять дрон в воздух и убедиться, что все моторы работают и синхронизированы между собой. Также можно проверить работу моторов, меняя направление движения квадрокоптера с помощью пульта управления.
Проверка работы видеокамеры (при наличии)
Если на квадрокоптере установлена видеокамера, ее работу также необходимо проверить перед полетом. Для этого необходимо убедиться, что камера работает и передает изображение на пульт управления. Также нужно проверить качество видео и его устойчивость во время полета.
Проверка заряда батареи
Для успешного полета важно, чтобы батарея квадрокоптера была полностью заряжена. Перед запуском дрона необходимо проверить уровень заряда батареи с помощью индикатора на пульт управления. Если уровень заряда ниже 50%, рекомендуется зарядить батарею перед вылетом.
Рекомендации по безопасной эксплуатации
1. Будьте осторожны при полете
Перед полетом убедитесь, что батарея квадрокоптера полностью заряжена, совершайте полеты в безветренную погоду и избегайте полетов над многолюдными местами.
Полеты вблизи электроэнергетических линий, зданий, мостов и других сооружений могут привести к неисправности квадрокоптера. Избегайте также полетов вблизи аэродромов и аэропортов.
2. Обязательный контроль квадрокоптера
Перед каждым полетом проверьте квадрокоптер на наличие механических повреждений, убедитесь в исправности всех компонентов и деталей.
Контрольный список может включать следующие пункты: проверку кабелей и коннекторов, состояние объектива камеры, работоспособность аккумулятора.
3. Следите за высотой полета и дистанцией от пилота
Высота полета не должна превышать предельных значений, указанных в инструкции квадрокоптера. Также необходимо следить за дистанцией между квадрокоптером и оператором.
При полете на большую дистанцию рекомендуется использовать систему GPS для точного определения местоположения квадрокоптера.
4. Будьте готовы к авариям
Даже при соблюдении всех рекомендаций и правил эксплуатации, аварии могут произойти. Для минимизации возможных ущербов рекомендуется использовать защиту пропеллеров, а также иметь запасные части и аккумуляторы.
Помните, что безопасность во время полета зависит от правильной эксплуатации и внимательности оператора квадрокоптера.