Содержание
- 1 Установка операционной системы
- 2 Конфигурационные файлы EP7i92
- 3 Подключение к ПК
- 4 Утилита mesaflash
- 4.1 Описание
- 4.2 Параметры mesaflash
- 4.3 Прошивка контроллера
- 4.4 Настройка сети для передачи файлов
- 4.5 Возможные ошибки и методы исправления
- 4.5.1 Ошибка: BootSector is invalid
- 4.5.2 Черный экран. Режим nomodeset
- 5 Приложения
- 5.1 Переустановка Anydesk
- 5.2 Черный и белый список материнских плат
- 5.3 Компенсация неравномерности накатки винта
Установка операционной системы
Обратите внимание, что операционная система Linux имеет сборки в основе которых лежат ядра. Необходимо понимать отличие, потому как разные конфигурации LinuxCNC работают с разными ядрами. Рассмотрим подробнее:
| ОС | Ядро | Применение | Описание |
|---|---|---|---|
| Debian 7, Debian 9 | RTAI | LPT | При работе через LPT требует операционная система с хорошим откликом в реальном времени. Если вы планируете работать с контроллером на основе LPT то необходимо выбрать данную операционную систему. |
| Debain 10, Mint | PREEMPT-RT | Mesa | Т.к. контроллеры Mesa работают через Ethernet, PCI или PCI-E, то нет необходимости в системе реального времени, а потому используется ОС Linux с ядром PREEMPT-RT. Если вы решили работать через данный контроллер то остановитесь на этой операционной системе. |
Для работы с контроллером Mesa EP7i92 мы рекомендуем использовать операционную системы Linux Mint 19 или Debian 10.
Образ LinuxMint 19 доступен для скачивания по ссылке: Скачать. Установка данного образа происходит стандартно.
Утилита для создания загрузочной флешки: WinSetupFromUSB
Архив с образом Craftex (Debian10) устанавливается не через загрузочный флеш-диск, а с помощью разворачивания образа через Acronis.
Образ Craftex на основе Debian10 доступен для скачивания по ссылке Debian10.
Предпочтительным является использование образа Debian 10 в виду большей стабильности. Обратите внимание, на черный и белый список материнских плат и процессоров для использования данной операционной системы для работы на ЧПУ.
Конфигурационные файлы EP7i92
Доступна конфигурация для 1хLPT-DPTR 1.03: Ссылка для скачивания
Конфигурационные файлы необходимо поместить oem/linuxcnc/configs.
Подключение к ПК
Контроллер EP7i92 подключается к ПК с ОС Linux по интерфейсу Ethernet.
Для того, чтобы установить сетевое соединение с ПК нужно произвести следующую настройку:
1. Определить IP-адрес контроллера. Устанавливается с помощью перемычек на плате W5,W6.
Примечание: Положение DOWN соответствует правому положению перемычки (располагать по читаемости надписей на плате).
| W5 | W6 | IP | Примечание |
|---|---|---|---|
| DOWN | DOWN | 192.168.1.121 | |
| DOWN | UP | EEPROM (с завода 10.10.10.10) | Установлен по умолчанию, рекомендован к работе. |
| UP | DOWN | BOOTP | |
| UP | UP | INVALID |
При тестировании контроллера на заводе изготовителе перемычки устанавливаются как DOWN-UP, что соответствует IP-адресу контроллера 10.10.10.10.
Для того, чтобы контроллер определился в системе необходимо задать IP адрес ПК вручную.
IP Адрес: 10.10.10.2 (или другой отличный от 10.10.10.10)
Маска: 8
Шлюз: 10.10.10.10
Убедитесь, что соединение с контроллером правильное. Откройте терминал и введите команду:
ping 10.10.10.10
Если вы получаете ответ формата 64 bytes from 10.10.10.10: icmp_seq=1 ttl=64 time=0.136 значит связь с контроллером присутствует.
Утилита mesaflash
Описание
mesaflash позволяет записать в EEPROM программу необходимую для работы с разными интерфейсными платами не прибегая к использованию программаторов или других вспомогательных устройств. Для того, чтобы перепрошить контроллер EP7i92 достаточно подключить его по сети в ОС Linux.
Параметры mesaflash
Перед началом работы убедитесь, что в вашей OC Linux установлена утилита mesaflash. Откройте терминал и введите mesaflash , ответом на запрос должна быть указана установленная версия (к примеру 3.3).
Запрос строится из команды mesaflash и параметра (или нескольких параметров)
| Параметр | Описание |
|---|---|
mesaflash --help |
Отобразить все доступные параметры с описанием |
mesaflash --device |
Указать устройство |
mesaflash --addr |
Указать адрес устройства |
mesaflash --reload |
Перезагрузить контроллер |
mesaflash --readhmid |
Отобразить доступные пины |
mesaflash --write |
Записать указанную прошивку в EEPROM |
Примеры:
Проверить устройство 7i92, подключенного по Ethernet с IP-адресом 10.10.10.10:
Запрос: mesaflash --device 7i92 --addr 10.10.10.10
Ответ: ETH device 7i92 at ip=10.10.10.10
Отобразить доступные пины на устройстве 7i92, подключенного по Ethernet c IP-адресом 10.10.10.10:
Запрос: mesaflash --device 7i92 --addr 10.10.10.10 --readhmid
Ответом будет являться таблицы с описанием пинов.
Прошивка контроллера
В таблице собраны прошивки для разных интерфейсных плат с примечаниями.
| Ссылка для скачивания | Название | Описание |
|---|---|---|
| Ссылка | EP7i92_LPT_DPTR103.bit | Одна плата LPT-DPTR 1.03 на разъеме P2. Прошивка по умолчанию с завода. |
| Ссылка | EP7i92_LPT_DPTRx2.bit | Две платы LPT-DPTR 1.03 |
Для того, чтобы прошить контроллер, поместите необходимую прошивку в папку /home/oem (где oem — имя пользователя). К примеру EP7i92_LPT_DPTR103.bit.
Откройте терминал и введите:
mesaflash --device 7i92 --addr 10.10.10.10 --write EP7i92_LPT_DPTR103.bit
Настройка сети для передачи файлов
Для организации удобного рабочего пространства для ЧПУ-станка, мы рекомендуем использование сети для передачи файлов с ПК на ОС Windows на ПК с ОС Linux Debian 10. Это позволит отказаться от использования флеш-диска для передачи управляющих программ. Обратите внимание, сетевое подключение может быть организованно либо по сетевому кабелю (требуется установка доп. сетевого интерфейса в ПК), либо по сети Wi-Fi.
Для этого на ПК с Windows необходимо установить ПО WinSCP, распространяемое бесплатно по ссылке: Ссылка
На ПК с ОС Linux Debian 10 необходимо установить openssh server. Для этого в терминале (при подключенном интернете) необходимо ввести:
sudo apt install openssh-server
Обратите внимание, в последних версиях Debian 10 + Craftex openshh server уже установлен.
Далее необходимо настроить подключение в WinSCP.
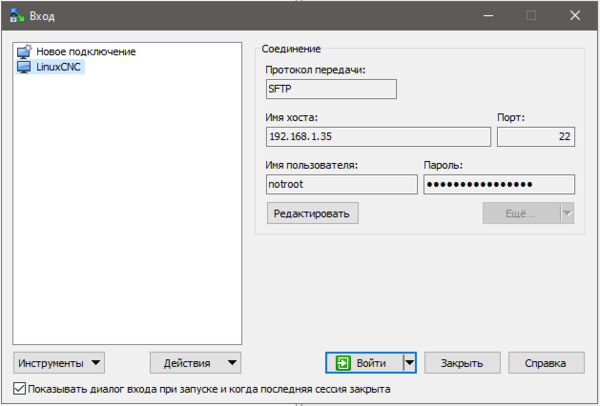
Имя хоста: IP-адрес компьютера с OC Linux Debian 10. Для того, чтобы узнать какой IP-адрес ПК, на установленного возле станка необходимо в терминале ввести sudo ifconfig.
Имя пользователя: notroot
Пароль:*******.
По умолчанию, пароль на ПК, подготовленных на заводе-изготовителе ООО «ЧПУ-Технологии» — «1»
Возможные ошибки и методы исправления
Ошибка: BootSector is invalid
Если при попытке записи *.bit файла в EEPROM контроллера вы получаете ошибку BootSector is invalid, то укажите параметр --fix-boot-block .
Пример: mesaflash --device 7i92 --addr 10.10.10.10 --write EP7i92_LPT_DPTR103.bit --fix-boot-block
Черный экран. Режим nomodeset
Для некоторых видеокарт или графических ядер в составе процессора отсутствуют драйвера в Debian10. Для того, чтобы запустить ОС на ПК с такой проблемой необходимо перейти в режим nomodeset.
После запуска необходимо отредактировать файл grub. Для этого необходимо открыть терминал и ввести следующие команды:
sudo gedit /etc/default/grub
Открыть файл grub и привести строку GRUB_CMDLINE_LINUX_DEFAULT="quiet isolpus=1 net.ifnames=0 biosdevname=0" к виду GRUB_CMDLINE_LINUX_DEFAULT="quiet nomodeset isolpus=1 net.ifnames=0 biosdevname=0"
Сохранить и закрыть редактор gedit.
Обновить загрузчик grub: sudo update-grub
Приложения
Переустановка Anydesk
Приложение Anydesk служит для создания удаленного управления с стороннего ПК через интернет. Используется технической поддержкой для помощи в настройке, а также для удаленного управления пользователем.
Иногда могут возникнуть проблемы с подключением через Anydesk ввиду совпадения ID компьютера, в таком случае необходимо переустановить Anydesk, согласно следующему алгоритму:
- Скачать приложение Anydesk по ссылке: Anydesk Download
- Поместить скачанный в файл в каталог notroot
- Открыть терминал и ввести следующие команды:
sudo apt-get remove anydesksudo apt-get purge anydesksudo dpkg --install anydesk_6.1.1-1_amd64.deb
Черный и белый список материнских плат
Компенсация неравномерности накатки винта
При работе на станках без обратной связи от внешнего линейного отсчетного устройства (например линейного инкрементального датчика) возникает ошибка позиционирования. Данное обстоятельство возникает из-за: люфтов в гайке ШВП, либо в других системах; неравномерной накатки винта, в случаи использования ШВП, либо некачественно выполненной рейки, при использовании реечной передачи и прочее; не точной обработки команд драйвером (имеется отклонение в делении шага, указанного в системе, от действительного. Для корректировки ошибки в LinuxCNC имеется функция компенсации действительного положения оси.
В процессе работы необходимо наличие прибора/устройства для определения действительного положения оси. В данном руководстве будет описано использование инкрементального линейного энкодера с системой индикации.
Первоначально в ini. файле в разделе необходимой оси [JOINT_…] прописываем следующие строй: COMP_FILE = xcrew.comp, где xcrew.comp — файл с необходимыми значениями координат оси; COMP_FILE_TYPE = 0, где 0 — в файле компенсации указываются действительные координаты (на подобие 200.023), 1 — в файле компенсации указываются указывается разница заданного значения и действительного (на подобие 0.012).
Далее создаем сам файл со значениями. Имя файла может быть любым, но расширении необходимо сделать .comp. Из себя он представляет список координат, разделенный на 3 колонки/столбца, в которых прописываются: 1 столбец — желаемая координата (координата прописываемая в G-коде), 2 столбец — действительная (полученная от внешнего линейного датчика) координата при передвижении в положительном направлении, 3 столбец — действительная (полученная от внешнего линейного датчика) координата при передвижении в отрицательном направлении. Всего файл компенсации поддерживает 256 точек измерения
Порядок необходимых действий:
1)Выбираем шаг с которым будем проводить измерения (например 50 мм) и в файле компенсации прописываем координаты с выбранным шагом:
0 0 0
50 50 50
100 100 100
и так далее, на необходимую длину измерения.
2)Отправляем проверяемую ось в домашнее положение
3)Устанавливаем линейный датчик на проверяемую ось. Например устанавливаем инкрементальную линейку на рабочий стол (перед этим установите линейку на жесткое основание, так как необходимо, чтобы корпус оставался неподвижным при измерениях)
4)Выставляем линейку параллельно проверяемой оси (<0.01-0.02 мм)
5)Крепим головку инкрементальной линейки к перпендикулярной оси (например: у нас портальный станок; проверяем ось Y; линейку закрепили и выставили параллельно выбранной оси; считывающую головку инкрементального датчика крепим, допустим у шпинделю, чтобы при перемещении портала, головка двигалась совместно с ним)
6)На системе индикации (либо другом обрабатывающем устройстве) обнуляем значение
7)Через LinuxCNC перемещаем ось с выбранным шагом в положительном направлении и записываем значения, полученные с инкрементальной линейки
8)После достижения последней точки, записываем полученные значения во 2-й столбик файла компенсации и перезапускаем LinuxCNC
Должно получиться подобно:
0 0 0
50 50,015 50
100 100,023 100
и так далее
9)Перезапускаем LinuxCNC и повторяем п. 4-5 (!!!при отправке в домашнее положение убедитесь, что это не повредит измерительный датчик!!!).
10)Перемещаем ось по некоторым точка и убеждаемся, что действительное положение (полученное с датчика) стало ближе к заданному.
12)Перемещаем ось в конечное положение. Действительное положение должно почти совпасть с заданным (+-0,003 при использовании микронного датчика).
12)Повторяем п.7 в отрицательном положении.
13)После достижения последней точки, записываем полученные значения в 3-й столбик файла компенсации (ВАЖНО! первую строчку с нулевыми значениями не стоит менять) и перезапускаем LinuxCNC
Должно получиться подобно:
0 0 0
50 50,015 50,032
100 100,023 100,047
и так далее
14)Перезапускаем LinuxCNC и проверяем на сколько хорошо удалось скомпенсировать недостатки позиционирования
MESA электронные компоненты для станков с ЧПУ
Решение задач упралвения сложными системами в реальном времени.
Возможности плат Mesa для станков с ЧПУ
Работа с энкодерами
Платы Mesa могут обрабатывать квадратурные энкодеры на частотах до 12МГц. Это позволяет работать как с высокоскоростными осями, так и с энкодерами на шпинделях с высоким разрешением.
Стабильный Real-time
Платы работают с Linux с поддержкой Real-time. В основе плат Mesa лежит ПЛИС (FPGA) — это гарантирует стабильные временные задержки на частотах до нескольких мегагерц.
Богатый функционал
Благодоря большому разнообразию, система ЧПУ на основе плат Mesa может управлять практически любым оборудованием.
Интерфейсы поддерживаемые платами Mesa:
- Step/Dir — для управления шаговыми двигателями или современными сервопаками
- Analog +-10В — для модернизации обрудования на аналоговых приводах
- Encoder — квадратурные энкодеры с дифференциальными выходами ABZ
- Дискретные входы/выходы 5-30В (выходы от 200мА до 2А)
- RS-422 — высокоскоростные последовательные интерфейсы
Типичные конфигурации систем с ЧПУ на платах Mesa
Step/Dir
- 5 осей Step/Dir
- Входы/выходы для автоматики 24В (32/16 или 11/6)
- Энкодер шпинделя (в основном, для токарных станков)
- Управление шпинделем 0-10В или ШИМ
- Подключение дополнительных плат
Аналоговое управление +-10В
- 6 аналоговых выходов +-10В для осей и/или шпинделей
- 6 высокоскоростных энкодеров (возможно подключение оптических линеек)
- Входы/выходы для автоматики 24В (32/16)
- Подключение дополнительных плат
Выбор платы
Если вы не нашли нужную плату в списке, отправьте нам запрос. Возможно они есть у нас в наличии. На сайте представленны не все платы. Обратитесь к нашим менеджерам, чтобы получить полную информацию (тел: +7 812 325-21-71 доб. 4).
Mesa 7i96
- 5 осей Step/Dir (одна из осей может быть использована для управления шпинделем)
- Высокоскоростной энкодер
- Интерфейс Ethernet
- Выходы 11in 6out(24В 2А)
- Возможность подключения дочерних плат 25 pin
16 900₽
Mesa 7i76e
- 5 осей Step/Dir
- Выход на шпиндель 0-10В
- Высокоскоростной энкодер
- Интерфейс Ethernet
- Выходы 32in 16out(24В 200мА)
- Возможность подключения дочерних плат 25 pin
23 800₽
Mesa 7i97
- 6 осей +-10В (любая ось может быть шпинделем)
- 6 высокоскоростных энкодеров
- Интерфейс Ethernet
- Выходы 16in 6out(до 36В 2А)
- Возможность подключения дочерних плат 25 pin
35 900₽
Mesa 7i77
- 6 осей +-10В (любая ось может быть шпинделем)
- 6 высокоскоростных энкодеров
- Интерфейс Mesa 25pin (для подключения к платам 5i25, 7i92, 7i76e, 7i96)
- Выходы 32in 16out(24В 200мА)
18 660₽
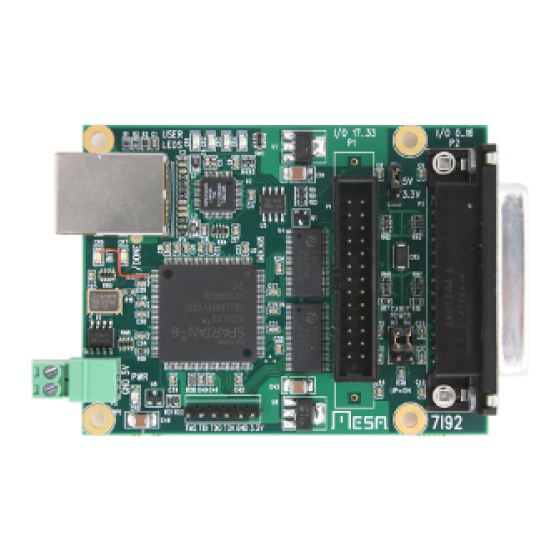
Mesa 7i92
- «Материнская плата» для подключения дочерних плат 25 pin
- Интерфейс Ethernet
- Два порта для подключения дочерних плат
11 800₽
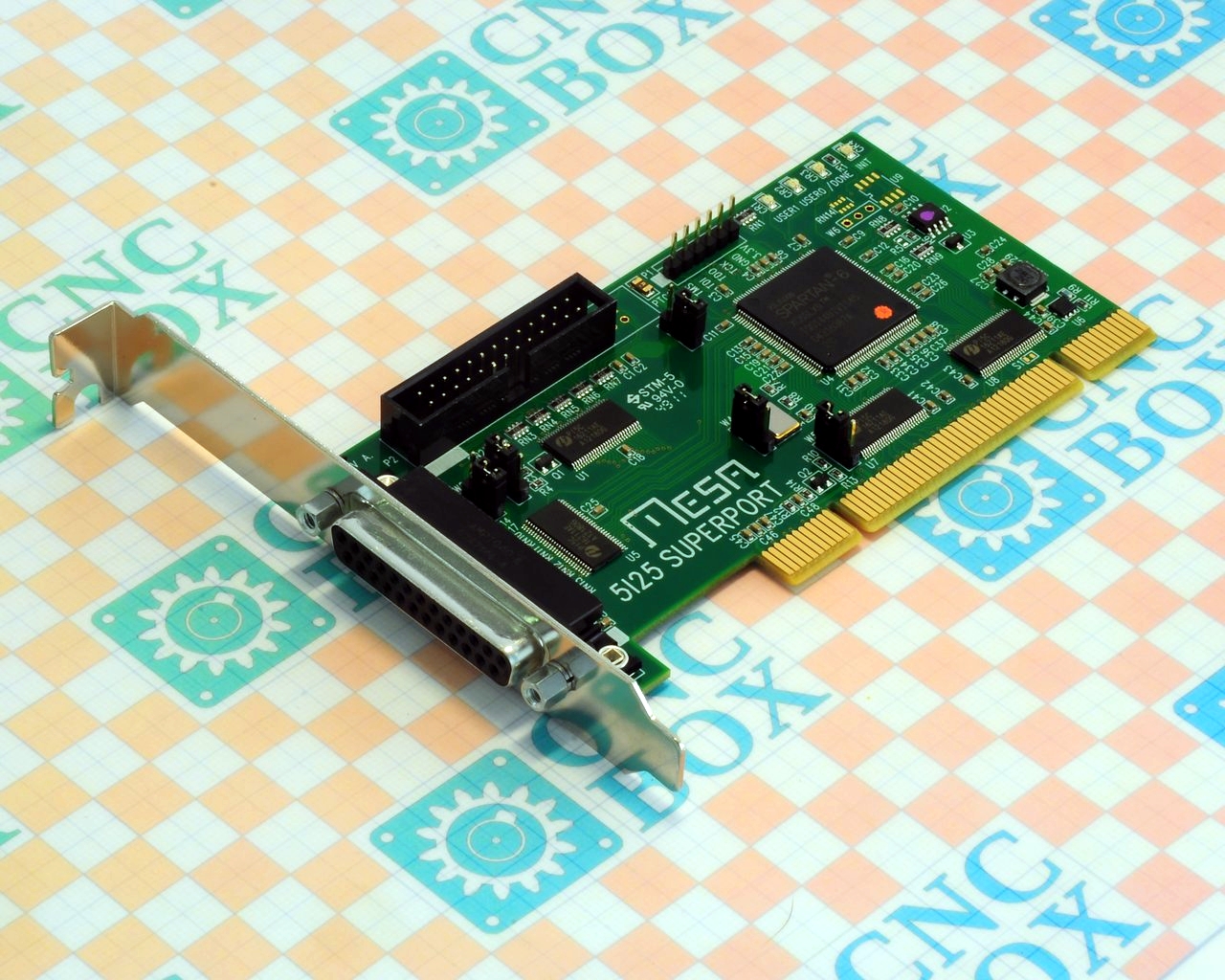
Mesa 5i25
- «Материнская плата» для подключения дочерних плат 25 pin
- Интерфейс PCI
- Два порта для подключения дочерних плат
11 800₽
Приобретение плат в ЗАО «Биоград»
Стоимость включает НДС
ЗАО «Биоград» работает на общей системе надогооблажения, стоимость плат включает 20% НДС.
Официальный представитель
ЗАО «Биоград» является официальным представителем Mesa Electronics в Российской Федерации
Поддержка
Наши специалисты обладают высоким уровнем знаний и помогут вам реализовать даже самые сложные системы управления.
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
7I92 ETHERNET
ANYTHING I/O
MANUAL
Version 1.7
Related Manuals for Mesa 7i92
Summary of Contents for Mesa 7i92
-
Page 1
7I92 ETHERNET ANYTHING I/O MANUAL Version 1.7… -
Page 2
This page intentionally not blank… -
Page 3: Table Of Contents
7I92 I/O CONNECTOR PIN-OUT ……..5…
-
Page 4
Table of Contents OPERATION …………8 MESAFLASH . -
Page 5
INFO AREA ACCESS ……..21 7I92 SUPPORTED MEMORY SPACES ……22 SPACE0: HOSTMOT2 REGISTERS . -
Page 6: General
The 7I92 provides 34 I/O bits (17 per connector) All I/O bits are 5V tolerant and have pullup resistors. A power source option allows the 7I92 to supply 5V power to breakout boards if desired. This 5V power is protected by a PTC.
-
Page 7: Hardware Configuration
CONNECTOR 5V POWER The 7I92 has the option to supply 5V power from the to the breakout board. This option is used by all Mesa breakout boards to simplify wiring. The option uses 4 parallel cable signals that are normally used as grounds for supplying 5V to the remote breakout board (DB25 pins 22,23,24 and 25).
-
Page 8: Preconfig Pull-Up Enable
Jumpers W5 and W6. IP ADDRESS DOWN DOWN FIXED 192.168.1.121 (DEFAULT) DOWN FIXED FROM EEPROM DOWN BOOTP INVALID Note: that the initial EEPROM IP address is set to 10.10.10.10 at Mesa, but can be changed to any address with the mesaflash utility. 7I92…
-
Page 9: Connectors
CONNECTORS CONNECTOR LOCATIONS AND DEFAULT JUMPER POSITIONS 7I92…
-
Page 10: 7I92 I/O Connector Pin-Out
CONNECTORS I/O CONNECTORS The 7I92 has 2 I/O connectors, P1 and P2 please see the 7I92IO.PIN file on the 7I92 distribution disk. Depending on 7I92 model P2 may be a DB25 female, DB25 male or 26 pin header. 7I92 IO P2 connector pinouts are as follows:…
-
Page 11
Note: 26 pin header P1 will match standard parallel port pin-out if terminated with flat cable 26 pin receptacle/DB25F cable with pin1s connected (and header pin 26 left open) A cable kit is available from MESA for the second port. 7I92… -
Page 12: Power Connector Pinout
P4 is a JTAG programming connector. This is normally used only for debugging or if both EEPROM configurations have been corrupted. In case of corrupted EEPROM contents the EEPROM can be re-programmed using Xilinx’s Impact tool. P4 JTAG CONNECTOR PINOUT FUNCTION +3.3V 7I92…
-
Page 13: Operation
Ethernet EEPROM locations 0x20 and 0X22. BootP allows the 7I92 address to be set by a DHCP/ BootP server. If BootP is chosen, the 7I92 will retry BootP requests at a ~1 Hz rate if the BootP server does not respond.
-
Page 14: Configuration
16M bit chip that has space for two configuration files. Since all Ethernet logic on the 7I92 is in the FPGA, a problem with configuration means that Ethernet access will not be possible. For this reason there is a backup method to recover from FPGA boot failures, fallback.
-
Page 15: Eeprom Layout
OPERATION EEPROM LAYOUT The EEPROM used on the 7I92 for configuration storage is the M25P16. The M25P16 is a 16 M bit (2 M byte) EEPROM with 32 64K byte sectors. Configuration files are stored on sector boundaries to allow individual configuration file erasing and updating.
-
Page 16
USER CONFIGURATION BLOCK 2 0x130000 USER CONFIGURATION BLOCK 3 0x140000 USER CONFIGURATION BLOCK 4 0x150000 USER CONFIGURATION BLOCK 5 0x160000 UNUSED/FREE 0x170000 UNUSED/FREE 0x180000 UNUSED/FREE 0x190000 UNUSED/FREE 0x1A0000 UNUSED/FREE 0x1B0000 UNUSED/FREE 0x1C0000 UNUSED/FREE 0x1D0000 UNUSED/FREE 0x1E0000 UNUSED/FREE 0x1F0000 UNUSED/FREE 7I92… -
Page 17: Bitfile Format
-g CRC:enable bitgen options must be set. WARNING: Never write a bitfile that is not designed for a 7I92 into the 7I92s EEPROM as this will likely «brick» the 7I92 card and require the card to be returned to Mesa for repair.
-
Page 18: Free Eeprom Space
(faster) JTAG FPGA load followed by Ethernet EEPROM update. CLOCK SIGNALS The 7I92 has a single 50 MHz clock signal from an on card crystal oscillator. The clock a can be multiplied and divided by the FPGAs clock generator block to generate a wide range of internal clock signals.
-
Page 19: Leds
OPERATION LEDS The 7I92 has 4 FPGA driven user LEDs (User 0 through User 3 = Green), and 2 FPGA driven status LEDs (red) and a power LED. The user LEDs can be used for any purpose, and can be helpful as a simple debugging feature. A low output signal from the FPGA lights the LED.
-
Page 20: Interface Cables
OPERATION INTERFACE CABLES Mesa daughtercards use a male to male DB25 cable to interface to the 7I92. For noise immunity and signal fidelity it is suggested that only IEEE-1284 rated cables be used. IEEE-1284 rated cables have a twisted pair shield wire for each signal wire and an overall shield terminated in the metal connector shell.
-
Page 21: Supplied Configurations
(four used locally on the 7I77s and two fed through for additional remotes), a watchdog timer and GPIO. 7I77_7I76D 7I77_7I76D is a configuration intended to work with a7I77 six axis analog servo daughtercard on P2 a 7I76 daughtercard on P1. 7I92…
-
Page 22: 7I77_7I74D
Each of the configurations has an associated file with file name extension .pin that describes the FPGA functions included in the configuration and the I/O pinout. These are plain text files that can be printed or viewed with any text editor. 7I92…
-
Page 23: Reference Information
LBP16 read commands are followed by the 16 bit address (if the A bit is set). LBP16 Write commands are followed by the address (if bit A is set) and the data to be written. LBP16 Addresses are always byte addresses. LBP data and addresses are little endian so must be sent LSB first. 7I92…
-
Page 24: Info Area
Is type: 01 = Register, 02 = Memory, 0E = EEPROM, 0F = Flash Is access types (bit 0 = 8 bit, bit 1 = 16 bit etc)so for example 0x06 means 16 bit and 32 bit operations allowed 7I92…
-
Page 25: Info Area Memranges Format
REFERENCE INFORMATION LBP16 INFO AREA MEMRANGES FORMAT Is erase block size Is Page size Ps address range Ranges are 2^E, 2^P, 2^S. All sizes and ranges are in bytes. E and P are 0 for non-flash memory 7I92…
-
Page 26: Info Area Access
Ispace 3 read with address NN6DLLHH FPGA flash space Ispace 3 read NN2D Ispace 6 read with address NN79LLHH LBP16 R/W space Ispace 6 read NN39 Ispace 7 read with address NN7DLLHH LBP16 R/O space Ispace 7 read NN3D 7I92…
-
Page 27: 7I92 Supported Memory Spaces
LBP16 7I92 SUPPORTED MEMORY SPACES The 7I92 firmware supports 6 address spaces. These will be described individually with example hexadecimal commands. The hex command examples below are written in LSB first order for convenience. In the hex command examples, the NN is the count/increment field of the LBP16 command and the LLHH is the low and high bytes of the address.
-
Page 28
; 32 bit data for GPIO port 0 at 0x1004 CCCCCCCC ; 32 bit data for GPIO port 0 at 0x1008 DDDDDDDD ; 32 bit data for GPIO port 0 at 0x100C Note like all LBP16 data, write data is LS byte first 7I92… -
Page 29: Space1: Ethernet Chip Access
IP address. The Ethernet EEPROM space is accessed as 16 bit data. The first 0x20 bytes are read only and the remaining 0x60 bytes are read/write. Space 2 read with address NN49LLHH Space 2 write with address NNC9LLHH Space 2 read NN09 Space 2 write NN89 7I92…
-
Page 30: Ethernet Eeprom Layout
ETHERNET EEPROM LAYOUT ADDRESS DATA 0000 Reserved RO 0002 MAC address LS Word RO 0004 MAC address Mid Word RO 0006 MAC address MS Word RO 0008 Reserved RO 000A Reserved RO 000C Reserved RO 000E Unused RO 7I92…
-
Page 31
EEPROM Netmask LS word RW (V16 and > firmware) 0026 EEPROM Netmask MS word RW (V16 and > firmware) 0028 DEBUG LED Mode (LS bit determines HostMot2 (0) or debug(1)) RW 002A Reserved RW 002C Reserved RW 002E Reserved RW 0030..007E Unused RW 7I92… -
Page 32: Space3: Fpga Flash Eeprom Chip Access
The page write is started by writing the flash address, reading the flash address, reading flash data, reading flash ID or issuing a erase sector command. For host synchronization, a read operation should follow every sector erase or page write. 7I92…
-
Page 33
Issue write flash data command with count 12345678 Doubleword 0 ABCD8888 Doubleword 1 ….FFFFFFFF Doubleword 63 (= 256 bytes) 014E0000 Read new address to commit write and so some data is returned for host synchronization (so host waits for write to complete) 7I92… -
Page 34
Write EEPROMWEna with 0x5A03 01CE000000000100 Write flash address with 0x 00010000 01CE0C0000000000 Write sector erase command (with dummy 32 bit data = 0) 014E0000 Read flash address for host synchronization (this will echo the address _after_ the sector is erased) 7I92… -
Page 35: Space4: Lbp Timer/Util Registers
0010..001E Scratch registers for any use The uSTimeStamp register reads the free running hardware microsecond timer. It is useful for timing internal 7I92 operations. Writes to the uSTimeStamp register are a no- op. The WaituS register delays processing for the specified number of microseconds when written, (0 to 65535 uS) reads return the last wait time written.
-
Page 36: Space6: Lbp Status/Control Registers
Space 6 write with address NND9LLHHDDDD Space 6 read NN19 Space 6 write NN99DDDD MEMORY SPACE 6 LAYOUT: ADDRESS DATA 0000 ErrorReg 0002 LBPParseErrors 0004 LBPMemErrors 0006 LBPWriteErrors 0008 RXPktCount 000A RXUDPCount 000C RXBadCount 000E TXPktCount 00010 TXUDPCount 00012 TXBadCount 7I92…
-
Page 37: Error Register Format
001C LBPReset Setting this to a non-zero value will do a full reset of the LBP16 firmware. The 7I92 will read its IP address jumpers and re-assign its IP address. The 7I92 will be unresponsive for as much as ½ of a second after this command.
-
Page 38: Space7: Lbp Read Only Information
0006 CardNameChar-6,7 0008 CardNameChar-8,9 000A CardNameChar-10,11 000C CardNameChar-12.13 000E CardNameChar-14,15 0010 LBPVersion 0012 FirmwareVersion 0014 Option Jumpers 0016 Reserved 0018 RecvStartTS 1 uSec timestamps 001A RecvDoneTS For performance monitoring 001C SendStartTS Send timestamps are 001E SendDoneTS from previous packet 7I92…
-
Page 39: Elbpcom
ELBPCOM ELBPCOM is a very simple demo program in Python (2.x) to allow simple checking of LBP16 host communication to the 7I92. ELBPCOM accepts hexadecimal LBP16 commands and data and returns hexadecimal results. Note that the timeout value will need to be increased to about 2 seconds to try flash sector erase commands.
-
Page 40: Specifications
INPUT VOLTAGE 5V TOL MODE -0.3V INPUT VOLTAGE 3.3V TOL MODE -0.3V OUTPUT VOLTAGE 24 MA SINK —- 0.6V FPGA outputs set for 24 MA drive OUTPUT VOLTAGE 24 MA SOURCE 2.4V —- FPGA outputs set for 24 MA drive 7I92…
-
Page 41: Card Drawing
REFERENCE INFORMATION CARD DRAWING 7I92…
Содержание
- 1 Установка операционной системы
- 2 Конфигурационные файлы EP7i92
- 3 Подключение к ПК
- 4 Утилита mesaflash
- 4.1 Описание
- 4.2 Параметры mesaflash
- 4.3 Прошивка контроллера
- 4.4 Настройка сети для передачи файлов
- 4.5 Возможные ошибки и методы исправления
- 4.5.1 Ошибка: BootSector is invalid
- 4.5.2 Черный экран. Режим nomodeset
- 5 Приложения
- 5.1 Переустановка Anydesk
- 5.2 Черный и белый список материнских плат
- 5.3 Компенсация неравномерности накатки винта
Установка операционной системы
Обратите внимание, что операционная система Linux имеет сборки в основе которых лежат ядра. Необходимо понимать отличие, потому как разные конфигурации LinuxCNC работают с разными ядрами. Рассмотрим подробнее:
| ОС | Ядро | Применение | Описание |
|---|---|---|---|
| Debian 7, Debian 9 | RTAI | LPT | При работе через LPT требует операционная система с хорошим откликом в реальном времени. Если вы планируете работать с контроллером на основе LPT то необходимо выбрать данную операционную систему. |
| Debain 10, Mint | PREEMPT-RT | Mesa | Т.к. контроллеры Mesa работают через Ethernet, PCI или PCI-E, то нет необходимости в системе реального времени, а потому используется ОС Linux с ядром PREEMPT-RT. Если вы решили работать через данный контроллер то остановитесь на этой операционной системе. |
Для работы с контроллером Mesa EP7i92 мы рекомендуем использовать операционную системы Linux Mint 19 или Debian 10.
Образ LinuxMint 19 доступен для скачивания по ссылке: Скачать. Установка данного образа происходит стандартно.
Утилита для создания загрузочной флешки: WinSetupFromUSB
Архив с образом Craftex (Debian10) устанавливается не через загрузочный флеш-диск, а с помощью разворачивания образа через Acronis.
Образ Craftex на основе Debian10 доступен для скачивания по ссылке Debian10.
Предпочтительным является использование образа Debian 10 в виду большей стабильности. Обратите внимание, на черный и белый список материнских плат и процессоров для использования данной операционной системы для работы на ЧПУ.
Конфигурационные файлы EP7i92
Доступна конфигурация для 1хLPT-DPTR 1.03: Ссылка для скачивания
Конфигурационные файлы необходимо поместить oem/linuxcnc/configs.
Подключение к ПК
Контроллер EP7i92 подключается к ПК с ОС Linux по интерфейсу Ethernet.
Для того, чтобы установить сетевое соединение с ПК нужно произвести следующую настройку:
1. Определить IP-адрес контроллера. Устанавливается с помощью перемычек на плате W5,W6.
Примечание: Положение DOWN соответствует правому положению перемычки (располагать по читаемости надписей на плате).
| W5 | W6 | IP | Примечание |
|---|---|---|---|
| DOWN | DOWN | 192.168.1.121 | |
| DOWN | UP | EEPROM (с завода 10.10.10.10) | Установлен по умолчанию, рекомендован к работе. |
| UP | DOWN | BOOTP | |
| UP | UP | INVALID |
При тестировании контроллера на заводе изготовителе перемычки устанавливаются как DOWN-UP, что соответствует IP-адресу контроллера 10.10.10.10.
Для того, чтобы контроллер определился в системе необходимо задать IP адрес ПК вручную.
IP Адрес: 10.10.10.2 (или другой отличный от 10.10.10.10)
Маска: 8
Шлюз: 10.10.10.10
Убедитесь, что соединение с контроллером правильное. Откройте терминал и введите команду:
ping 10.10.10.10
Если вы получаете ответ формата 64 bytes from 10.10.10.10: icmp_seq=1 ttl=64 time=0.136 значит связь с контроллером присутствует.
Утилита mesaflash
Описание
mesaflash позволяет записать в EEPROM программу необходимую для работы с разными интерфейсными платами не прибегая к использованию программаторов или других вспомогательных устройств. Для того, чтобы перепрошить контроллер EP7i92 достаточно подключить его по сети в ОС Linux.
Параметры mesaflash
Перед началом работы убедитесь, что в вашей OC Linux установлена утилита mesaflash. Откройте терминал и введите mesaflash , ответом на запрос должна быть указана установленная версия (к примеру 3.3).
Запрос строится из команды mesaflash и параметра (или нескольких параметров)
| Параметр | Описание |
|---|---|
mesaflash --help |
Отобразить все доступные параметры с описанием |
mesaflash --device |
Указать устройство |
mesaflash --addr |
Указать адрес устройства |
mesaflash --reload |
Перезагрузить контроллер |
mesaflash --readhmid |
Отобразить доступные пины |
mesaflash --write |
Записать указанную прошивку в EEPROM |
Примеры:
Проверить устройство 7i92, подключенного по Ethernet с IP-адресом 10.10.10.10:
Запрос: mesaflash --device 7i92 --addr 10.10.10.10
Ответ: ETH device 7i92 at ip=10.10.10.10
Отобразить доступные пины на устройстве 7i92, подключенного по Ethernet c IP-адресом 10.10.10.10:
Запрос: mesaflash --device 7i92 --addr 10.10.10.10 --readhmid
Ответом будет являться таблицы с описанием пинов.
Прошивка контроллера
В таблице собраны прошивки для разных интерфейсных плат с примечаниями.
| Ссылка для скачивания | Название | Описание |
|---|---|---|
| Ссылка | EP7i92_LPT_DPTR103.bit | Одна плата LPT-DPTR 1.03 на разъеме P2. Прошивка по умолчанию с завода. |
| Ссылка | EP7i92_LPT_DPTRx2.bit | Две платы LPT-DPTR 1.03 |
Для того, чтобы прошить контроллер, поместите необходимую прошивку в папку /home/oem (где oem — имя пользователя). К примеру EP7i92_LPT_DPTR103.bit.
Откройте терминал и введите:
mesaflash --device 7i92 --addr 10.10.10.10 --write EP7i92_LPT_DPTR103.bit
Настройка сети для передачи файлов
Для организации удобного рабочего пространства для ЧПУ-станка, мы рекомендуем использование сети для передачи файлов с ПК на ОС Windows на ПК с ОС Linux Debian 10. Это позволит отказаться от использования флеш-диска для передачи управляющих программ. Обратите внимание, сетевое подключение может быть организованно либо по сетевому кабелю (требуется установка доп. сетевого интерфейса в ПК), либо по сети Wi-Fi.
Для этого на ПК с Windows необходимо установить ПО WinSCP, распространяемое бесплатно по ссылке: Ссылка
На ПК с ОС Linux Debian 10 необходимо установить openssh server. Для этого в терминале (при подключенном интернете) необходимо ввести:
sudo apt install openssh-server
Обратите внимание, в последних версиях Debian 10 + Craftex openshh server уже установлен.
Далее необходимо настроить подключение в WinSCP.
Имя хоста: IP-адрес компьютера с OC Linux Debian 10. Для того, чтобы узнать какой IP-адрес ПК, на установленного возле станка необходимо в терминале ввести sudo ifconfig.
Имя пользователя: notroot
Пароль:*******.
По умолчанию, пароль на ПК, подготовленных на заводе-изготовителе ООО «ЧПУ-Технологии» — «1»
Возможные ошибки и методы исправления
Ошибка: BootSector is invalid
Если при попытке записи *.bit файла в EEPROM контроллера вы получаете ошибку BootSector is invalid, то укажите параметр --fix-boot-block .
Пример: mesaflash --device 7i92 --addr 10.10.10.10 --write EP7i92_LPT_DPTR103.bit --fix-boot-block
Черный экран. Режим nomodeset
Для некоторых видеокарт или графических ядер в составе процессора отсутствуют драйвера в Debian10. Для того, чтобы запустить ОС на ПК с такой проблемой необходимо перейти в режим nomodeset.
После запуска необходимо отредактировать файл grub. Для этого необходимо открыть терминал и ввести следующие команды:
sudo gedit /etc/default/grub
Открыть файл grub и привести строку GRUB_CMDLINE_LINUX_DEFAULT="quiet isolpus=1 net.ifnames=0 biosdevname=0" к виду GRUB_CMDLINE_LINUX_DEFAULT="quiet nomodeset isolpus=1 net.ifnames=0 biosdevname=0"
Сохранить и закрыть редактор gedit.
Обновить загрузчик grub: sudo update-grub
Приложения
Переустановка Anydesk
Приложение Anydesk служит для создания удаленного управления с стороннего ПК через интернет. Используется технической поддержкой для помощи в настройке, а также для удаленного управления пользователем.
Иногда могут возникнуть проблемы с подключением через Anydesk ввиду совпадения ID компьютера, в таком случае необходимо переустановить Anydesk, согласно следующему алгоритму:
- Скачать приложение Anydesk по ссылке: Anydesk Download
- Поместить скачанный в файл в каталог notroot
- Открыть терминал и ввести следующие команды:
sudo apt-get remove anydesksudo apt-get purge anydesksudo dpkg --install anydesk_6.1.1-1_amd64.deb
Черный и белый список материнских плат
Компенсация неравномерности накатки винта
При работе на станках без обратной связи от внешнего линейного отсчетного устройства (например линейного инкрементального датчика) возникает ошибка позиционирования. Данное обстоятельство возникает из-за: люфтов в гайке ШВП, либо в других системах; неравномерной накатки винта, в случаи использования ШВП, либо некачественно выполненной рейки, при использовании реечной передачи и прочее; не точной обработки команд драйвером (имеется отклонение в делении шага, указанного в системе, от действительного. Для корректировки ошибки в LinuxCNC имеется функция компенсации действительного положения оси.
В процессе работы необходимо наличие прибора/устройства для определения действительного положения оси. В данном руководстве будет описано использование инкрементального линейного энкодера с системой индикации.
Первоначально в ini. файле в разделе необходимой оси [JOINT_…] прописываем следующие строй: COMP_FILE = xcrew.comp, где xcrew.comp — файл с необходимыми значениями координат оси; COMP_FILE_TYPE = 0, где 0 — в файле компенсации указываются действительные координаты (на подобие 200.023), 1 — в файле компенсации указываются указывается разница заданного значения и действительного (на подобие 0.012).
Далее создаем сам файл со значениями. Имя файла может быть любым, но расширении необходимо сделать .comp. Из себя он представляет список координат, разделенный на 3 колонки/столбца, в которых прописываются: 1 столбец — желаемая координата (координата прописываемая в G-коде), 2 столбец — действительная (полученная от внешнего линейного датчика) координата при передвижении в положительном направлении, 3 столбец — действительная (полученная от внешнего линейного датчика) координата при передвижении в отрицательном направлении. Всего файл компенсации поддерживает 256 точек измерения
Порядок необходимых действий:
1)Выбираем шаг с которым будем проводить измерения (например 50 мм) и в файле компенсации прописываем координаты с выбранным шагом:
0 0 0
50 50 50
100 100 100
и так далее, на необходимую длину измерения.
2)Отправляем проверяемую ось в домашнее положение
3)Устанавливаем линейный датчик на проверяемую ось. Например устанавливаем инкрементальную линейку на рабочий стол (перед этим установите линейку на жесткое основание, так как необходимо, чтобы корпус оставался неподвижным при измерениях)
4)Выставляем линейку параллельно проверяемой оси (<0.01-0.02 мм)
5)Крепим головку инкрементальной линейки к перпендикулярной оси (например: у нас портальный станок; проверяем ось Y; линейку закрепили и выставили параллельно выбранной оси; считывающую головку инкрементального датчика крепим, допустим у шпинделю, чтобы при перемещении портала, головка двигалась совместно с ним)
6)На системе индикации (либо другом обрабатывающем устройстве) обнуляем значение
7)Через LinuxCNC перемещаем ось с выбранным шагом в положительном направлении и записываем значения, полученные с инкрементальной линейки
8)После достижения последней точки, записываем полученные значения во 2-й столбик файла компенсации и перезапускаем LinuxCNC
Должно получиться подобно:
0 0 0
50 50,015 50
100 100,023 100
и так далее
9)Перезапускаем LinuxCNC и повторяем п. 4-5 (!!!при отправке в домашнее положение убедитесь, что это не повредит измерительный датчик!!!).
10)Перемещаем ось по некоторым точка и убеждаемся, что действительное положение (полученное с датчика) стало ближе к заданному.
12)Перемещаем ось в конечное положение. Действительное положение должно почти совпасть с заданным (+-0,003 при использовании микронного датчика).
12)Повторяем п.7 в отрицательном положении.
13)После достижения последней точки, записываем полученные значения в 3-й столбик файла компенсации (ВАЖНО! первую строчку с нулевыми значениями не стоит менять) и перезапускаем LinuxCNC
Должно получиться подобно:
0 0 0
50 50,015 50,032
100 100,023 100,047
и так далее
14)Перезапускаем LinuxCNC и проверяем на сколько хорошо удалось скомпенсировать недостатки позиционирования
Платы есть в наличии. Отправим в течение 3-х рабочих дней с момента оплаты.
Предпочтительные ТК — Деловые линии, СДЭК, Кашалот (она же КИТ и GTD), почта России.
Мы довезем до терминала, остальная доставка — за счет клиента.
На рисунке представлен вариант подключения периферии к плате:

На видео показан процесс установки LinuxCNC и тестового запуска платы управления.
Версия Linux, установленная на видео доступна по ссылке. Тестовую конфигурацию можно скачать по ссылке. Основными в ней являются 2 файла — CONFIG.hal и CONFIG.ini. Для понимания того как в них все устроено, советуем ознакомиться с русской wiki или оригинальной документацией по LinuxCNC.
Ниже приведена распиновка платы и стандартная конфигурация выводов для LinuxCNC.
При желании её можно изменить, записав на плату другую прошивку.

Джамперы W1 и W2 соответствуют джамперам W5 и W6 плат MESA 7I92. Они служат для выбора IP-адреса платы. При отправке, конфигурация джамперов соответствует загрузке IP-адреса с EEPROM, в которой он задан как 10.10.10.10. В большинстве случаев эти джамперы трогать не требуется.

Если по какой-то причине требуется поменять функии пинов, это можно сделать при помощи прошивки платы. Как это делается, показано на видео:
Для графической настройки конфигурации LinuxCNC под платы MESA, используется программа pncconf, которая доступна для запуска при установленной LinuxCNC. В процессе эксплуатации программы, выяснилось, что она довольно сырая и многие функции не работают, кроме того, для настройки нашей версии плат она не подходит. Поэтому программа, являющаяся набором python-скриптов, была немного доработана, чтобы у покупателей была возможность графической настройки конфигураций плат под LinuxCNC.
Файлы для обновления программы pncconf можно скачать по ссылке.
Данные файлы проверены на совместимость с LinuxCNC версий 2.7.14 и 2.7.15.
Данные файлы не будут совместимы с версиями 2.8 и выше по ряду причин.
Когда появится стабильная версия LinuxCNC из ветки 2.8 или 2.9, на сайт, возможно, будут добавлены файлы обновления pncconf и для этих версий.
Процесс обновления и пример использования pncconf смотрите на видео ниже.
CONNECTORS
I/O CONNECTORS
P1 HDR26 CONNECTOR PINOUT
HDR PIN
1
3
5
7
9
11
13
15
17
19
21
23
25
Note: 26 pin header P1 will match standard parallel port pin-out if terminated with
flat cable 26 pin receptacle/DB25F cable with pin1s connected (and header pin 26 left
open)
A cable kit is available from MESA for the second port.
FUNCTION
IO17
IO19
IO21
IO23
IO25
IO26
IO27
IO28
IO29
IO30
IO31
IO32
IO33
HDR PIN
FUNCTION
2
IO18
4
IO20
6
IO22
8
IO24
10
GND
12
GND
14
GND
16
GND
18
GND or 5V
20
GND or 5V
22
GND or 5V
24
GND or 5V
26
GND or 5V
7I92
6
Уважаемые клиенты, цены на наши станки и изделия находятся на изменении, просим отнестись с пониманием и уточнять актуальные цены у менеджеров.
- Главная
- Комплектующие к ЧПУ
- Драйверы и контроллеры шаговых двигателей
- ЧПУ контроллеры и переходники

Количество:
Код товара: 5808
- Описание
- Видео
EP7i92 являет контроллером для системы управления LinuxCNCCraftex, подключаемым по интерфейсу Ethernet. Построен на FPGA микросхеме от компании Xilinx.
Данный контроллер является Main Board т.е. это устройство-контроллер. Для того, чтобы подключить к данному контроллеру драйвера, датчики, шпиндель необходима плата гальванической развязки (Interface Board). Такой платой может являться, к примеру, LPT-DPTR 1.03.
Идеология данной платы, не позволяет определить набор входных и выходных сигналов т.к. он зависит от выбранной интерфейсной платы и конфигурации LinuxCNC.
К примеру, при подключении данного контроллера к LPT-DPTR 1.03, доступна следующая конфигурация:
— 4 оси по протоколу STEP-DIR (подключение с общим плюсом).
— 4 датчика домашнего положения (NPN).
— 2 реле 220V 3A.
— Аналоговый выход 0-10V для управления скоростью вращения шпинделя.
По умолчанию данный контроллер поставляется с прошивкой для LPT-DPTR1.03.
Для прошивки данного контроллера не требуется дополнительного оборудования. Прошивка происходит по сети через утилиту mesaflash.
В приложении примеры настройки данной платы с прошивкой LPTDPTR.bit и платой LPT-DPTR 1.03.
*Обратите внимание! При копировании файлов конфигурации необходимо, чтобы имена пользователей и конфигураций совпадали с параметрами в *.hal и *.ini файлах.