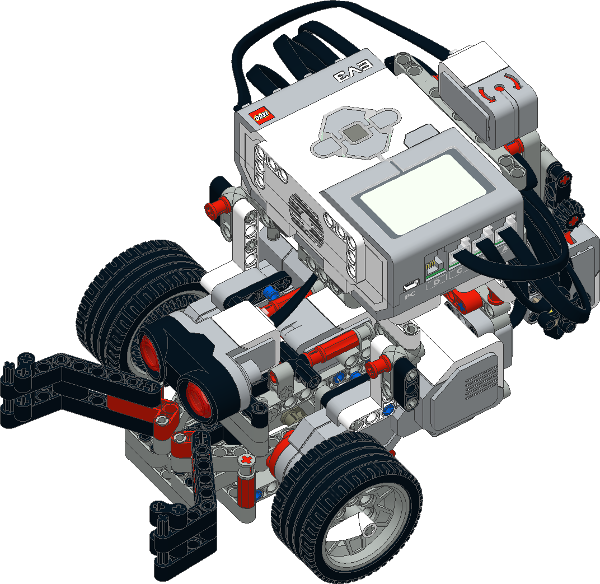
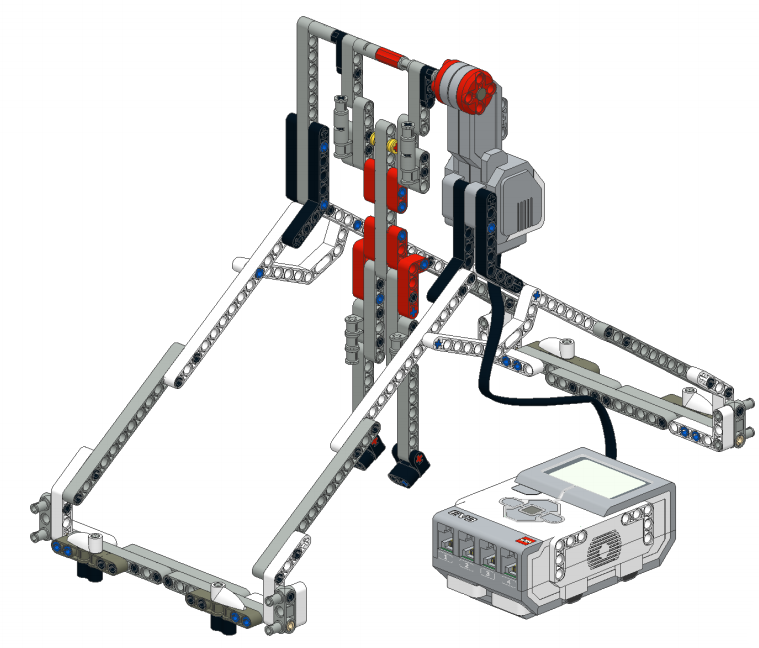
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
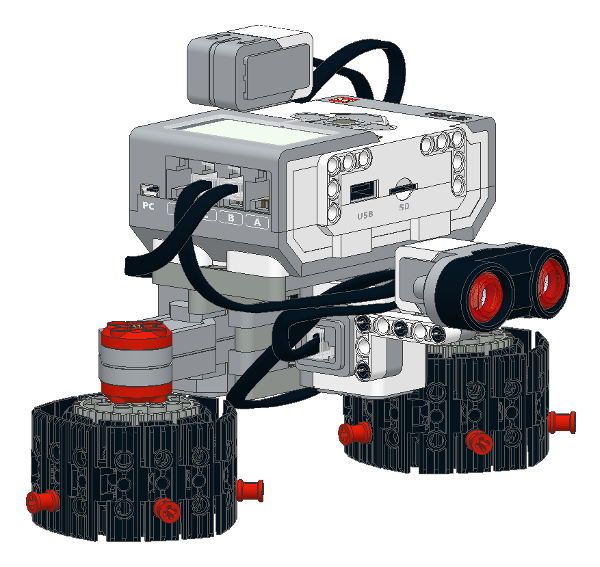
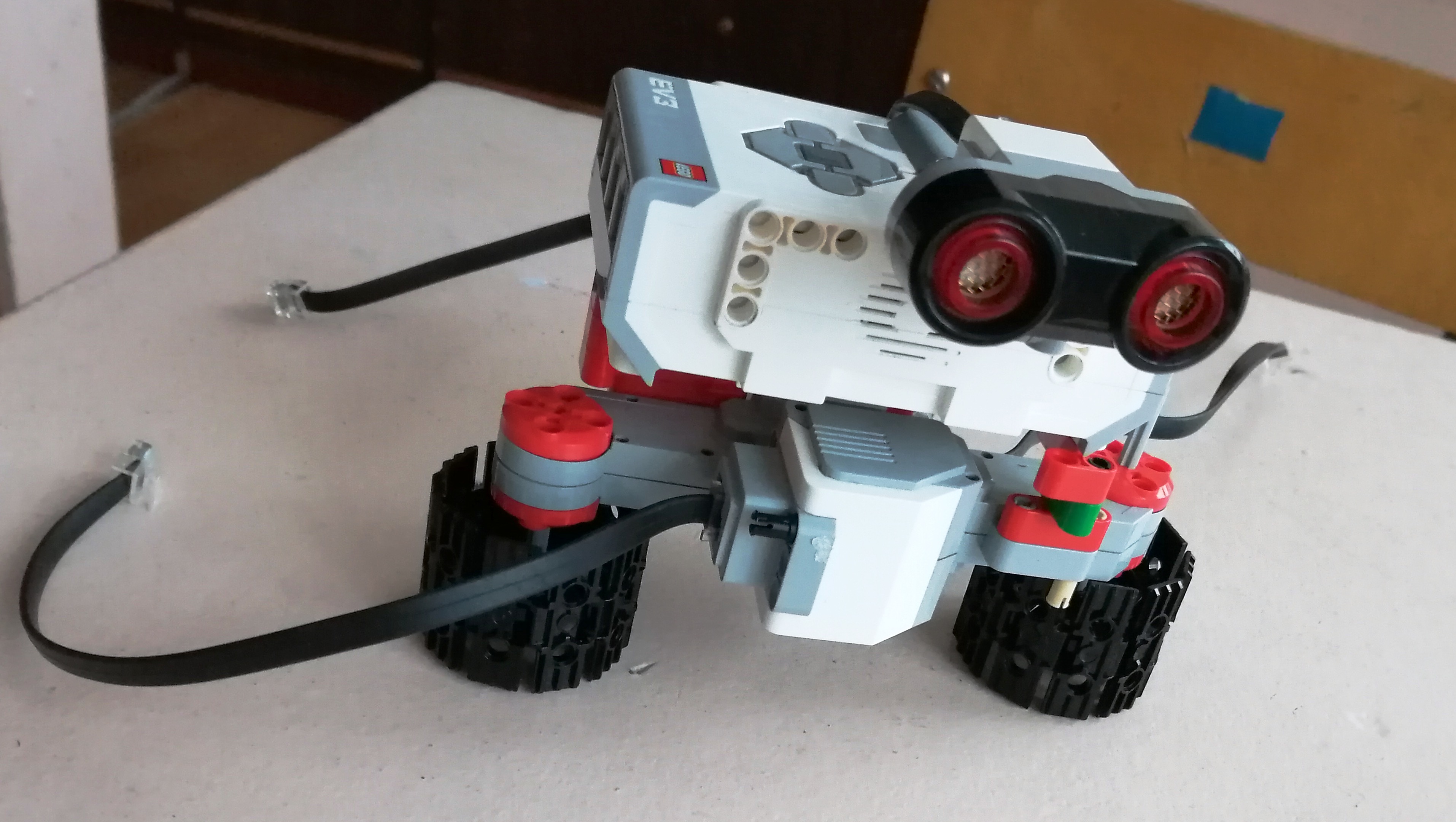
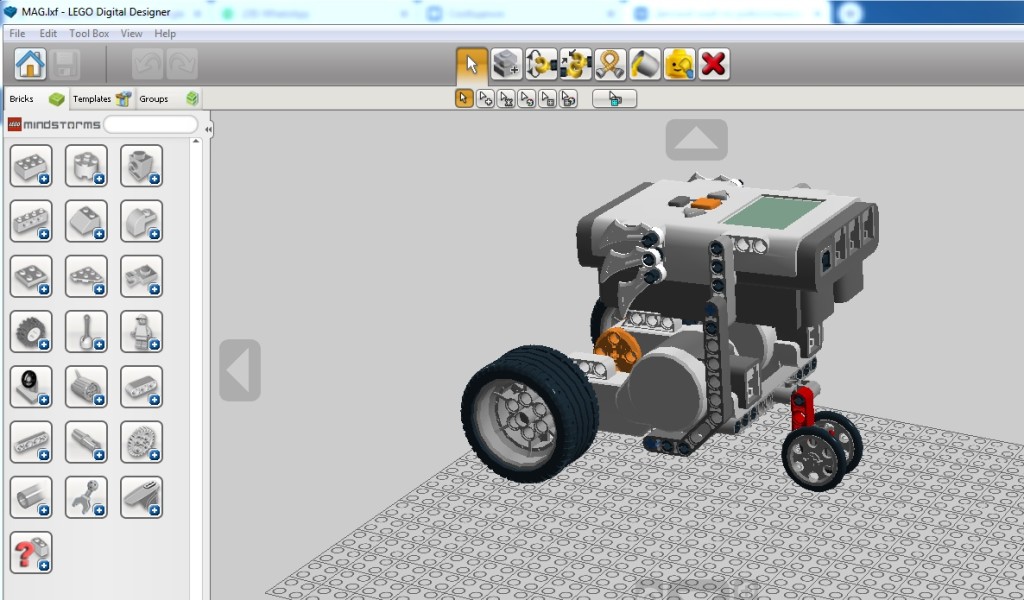
Конструкция робота простая и собрать его можно очень быстро. Инструкцию для сборки вы можете найти ниже. Я использовал набор LEGO Mindstorms Education EV3 (45544), при большом желании можно сделать аналогичного робота из домашней версии (31313), но тогда нужно будет менять программу.
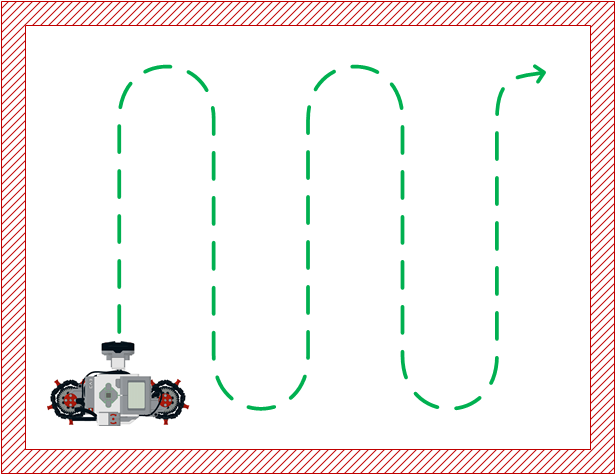
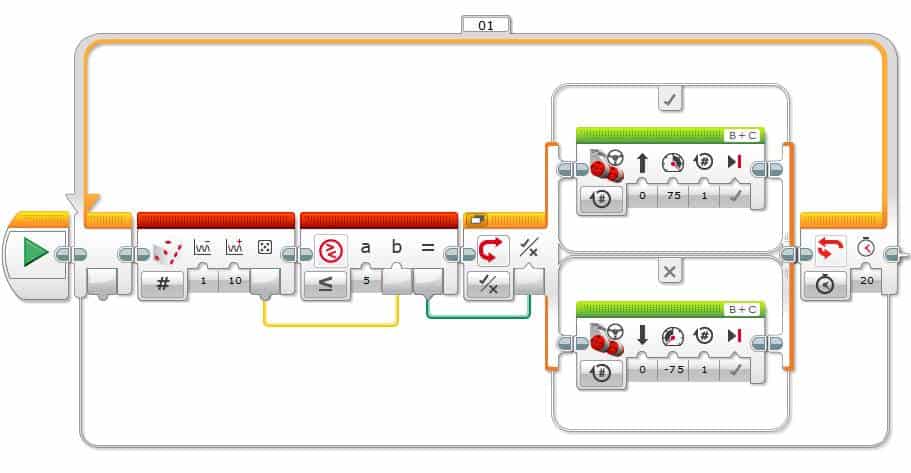
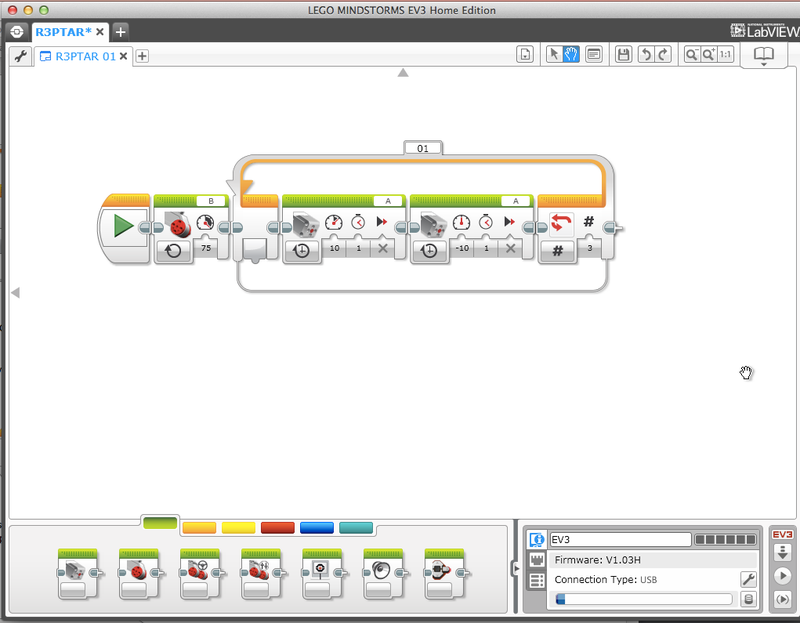
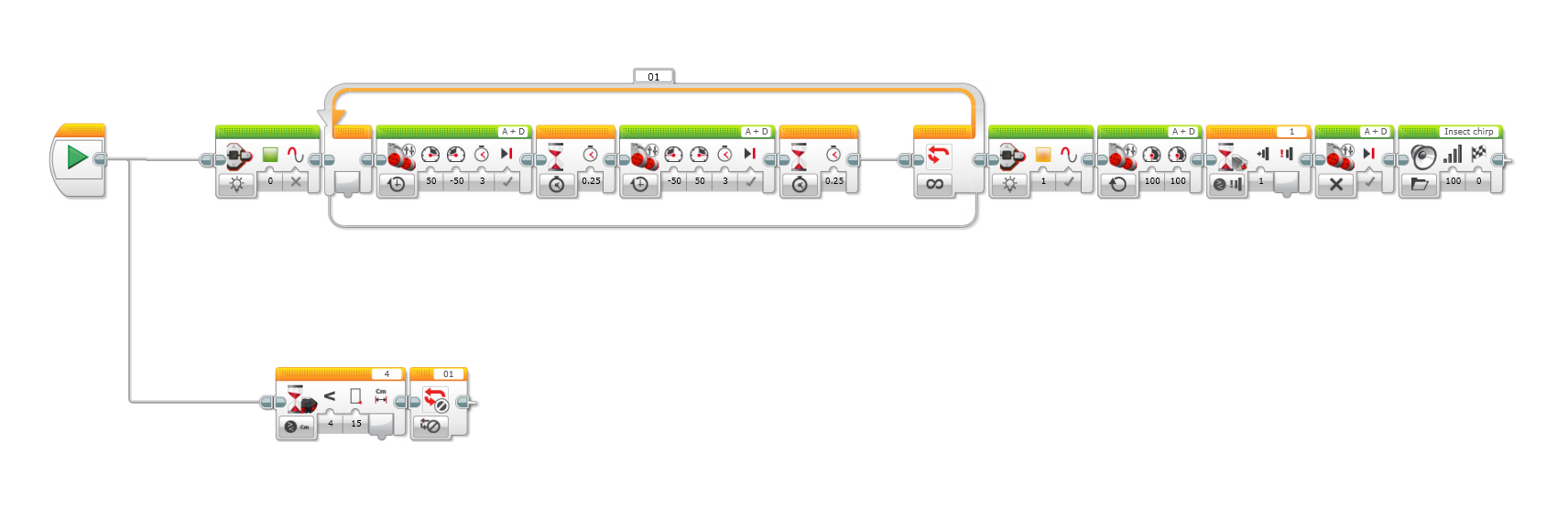
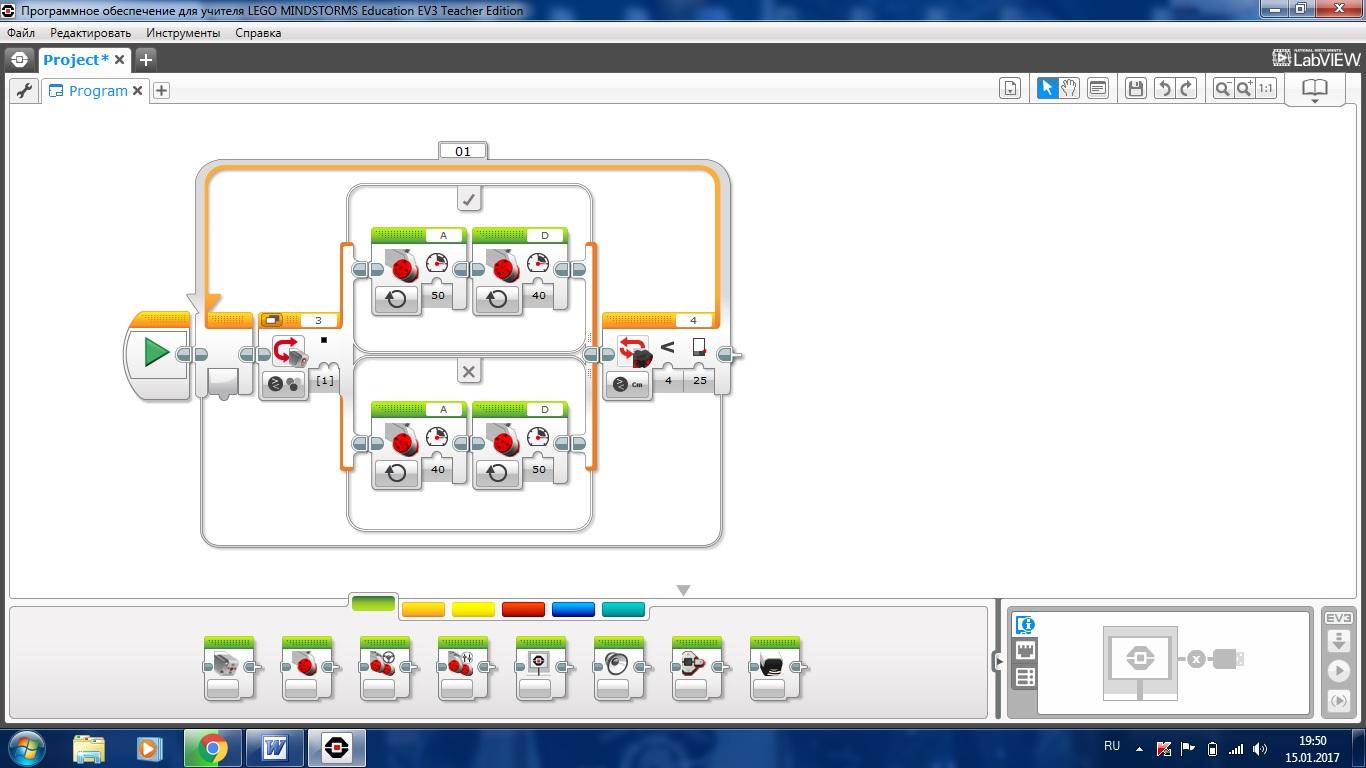
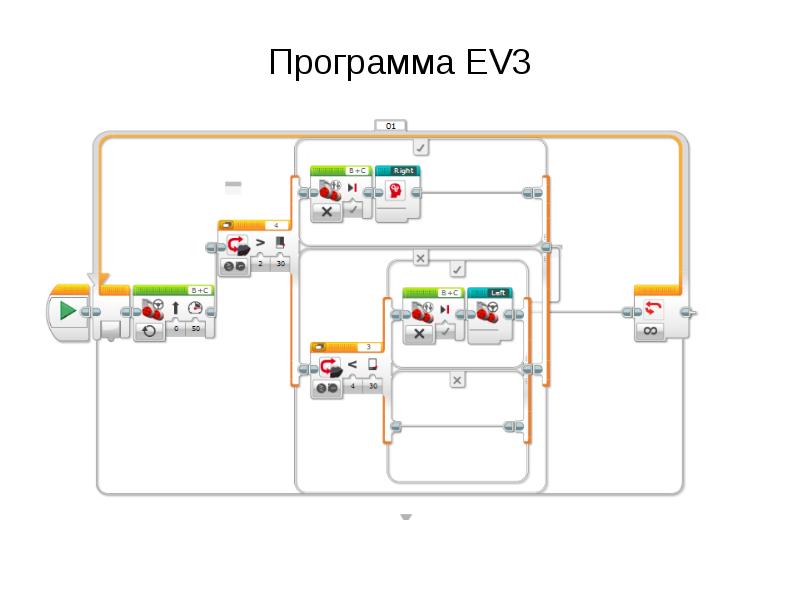
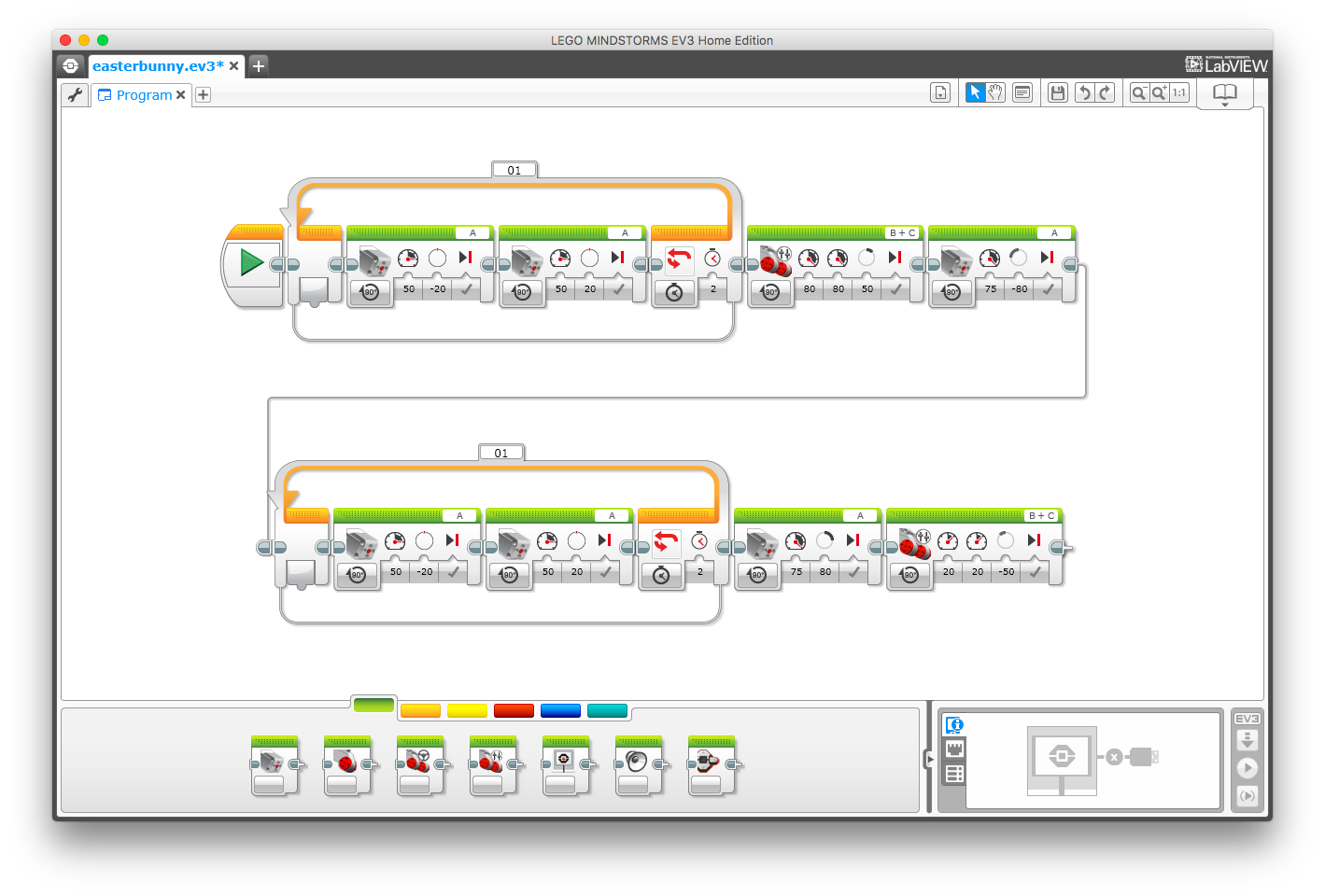
Чтобы робот помыл пол, написана простая демонстрационная программа. Программа рассчитана на то, что помещение будет прямоугольное. Робота нужно расположить в углу комнаты, чтобы рядом слева была стенка. После этого программу можно запускать. Ниже на схеме показано как двигается робот.
К сожалению, стандартный гироскоп LEGO не очень точно измеряет угол поворота и робот может постепенно уходить с прямой линии, поэтому лучше, если помещение будет поменьше. А ещё лучше использовать более точный гироскоп стороннего производителя.
А вот видео, где вы сможете оценить, как двигается робот:
Файлы:
-
Описание
-
Отзывы (0)
Описание
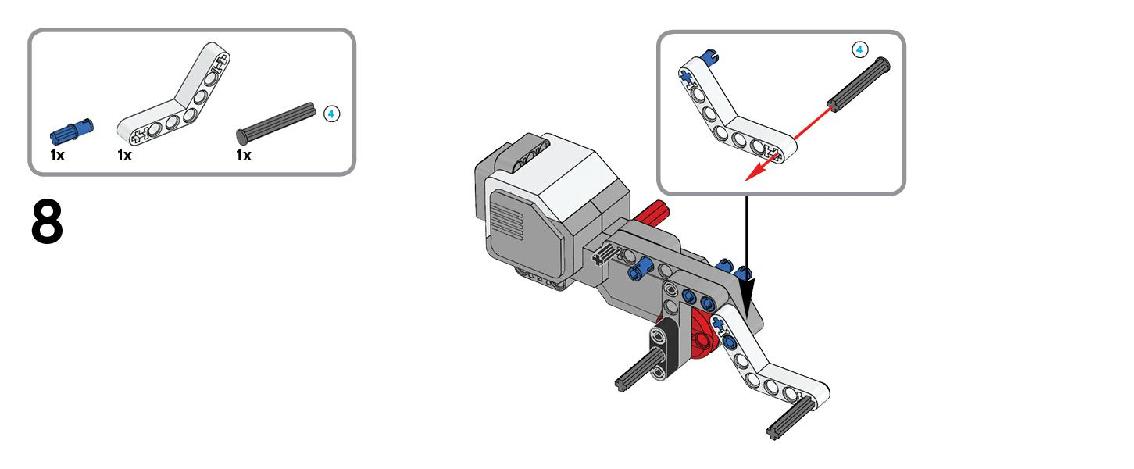
Инструкция по сборке Lego EV3 «Мойщик пола». Формат инструкции PDF
Отзывы
Отзывов пока нет.
Будьте первым, кто оставил отзыв на “Робот уборщик Lego EV3 Инструкция”
Ваш адрес email не будет опубликован.
Ваша оценка *
Ваш отзыв *
Имя *
Email *
Сохранить моё имя, email и адрес сайта в этом браузере для последующих моих комментариев.
Строительные технологии
МЕНЮ
Обновлено: 05.09.2023













![]()









































Читайте также:
- этюд розетка тройная открытой установки с заземлением со шторками 16а
- ремонт петель ворот гаража
- утепление потолка в доме из сруба
Робот мойщик полов EV3
Этот робот передвигается используя два диска. На них не трудно нацепить мокрые тряпочки и тогда робот будет мыть пол.
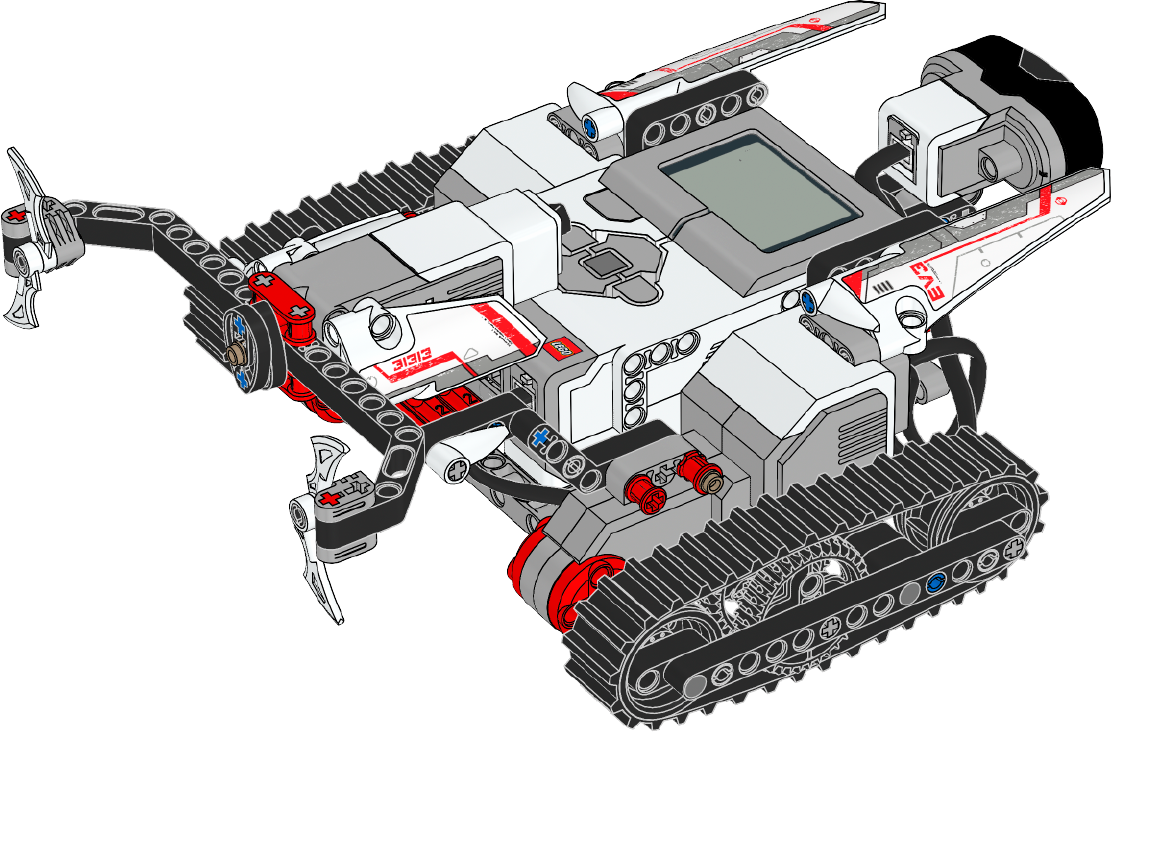
Конструкция робота мойщика полов проста: два мотора с нацепленными дисками параллельно полу, датчик — гироскоп, ультразвуковой датчик и сам блок управления (если у вас домашняя версия Lego Mindstorms, то вместо ультразвукового датчика можно взять инфракрасный).
Поочерёдно вращая дисками, с нацепленными тряпочками, робот передвигается вперёд. Когда ультразвуковой датчик замечает, что до стенки осталось совсем немного, робот разворачивается на 180 градусов вращая одним из дисков, измеряя градусы гироскопом. Далее он продолжает движение. Каждый раз достигая стенки, мойщик поворачивает разными дисками, чтобы не кружить на одном месте. Если робот совершив половину поворота замечает ещё одну стенку, то он понимает, что дошёл до угла и заканчивает программу.
В дальнейшем я планирую сделать более совершенную модель робота
мойщика пола, которая будет лучше промывать поверхность, в том числе углы.
С чего начать изучать Arduino
Не так давно мне пришли компоненты Arduino и стало необходимо узнать как с ними работать. В этом мне помогало то, что я ходил на кружок п…

-

Этот робот передвигается используя два диска. На них не трудно нацепить мокрые тряпочки и тогда робот будет мыть пол. Конструкция ро…
-

В мире существует огромное количество разных часов. Но это меня не остановило))), и я сделал ещё одни. Самое сложное во всех часах — сде…
-

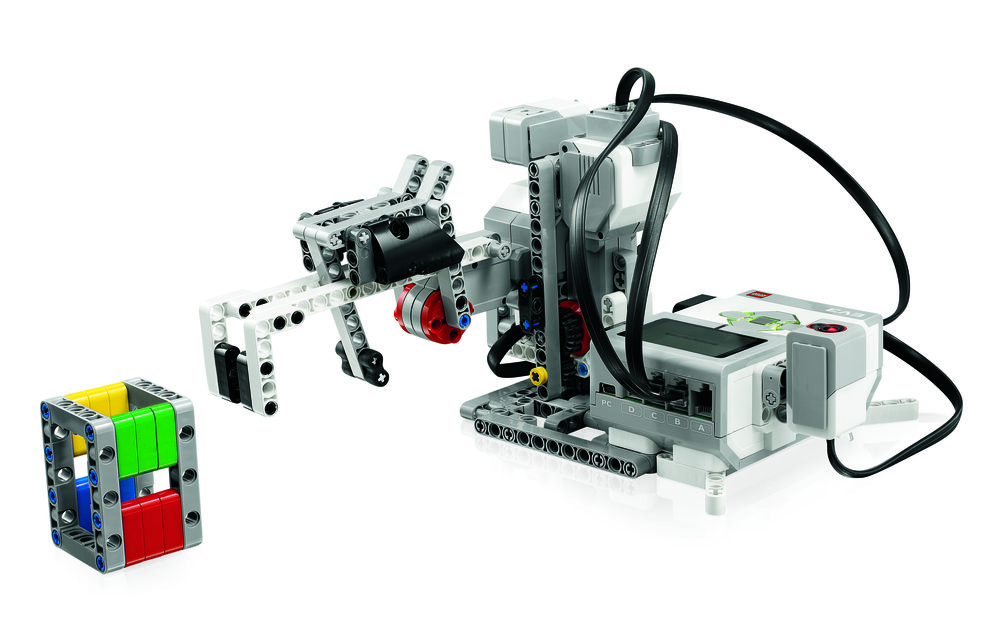
Этого робота я создал по одной из схем стандартных роботов Lego Mindstorms ev3. Сайт с инструкцией по сборке (там робот называется роборук…
Муниципальное
бюджетное учреждение дополнительного образования
Центр
внешкольной работы г. Белорецк
муниципального
района Белорецкий район Республики Башкортостан
муниципальный
конкурс исследовательских работ
«Взгляд
в будущее»
Направление:
робототехника
Инженерная
книга
«РОБОТ
-ЛИСТОЕД»
|
|
Работу выполнил: Кочетков Арсений МБУ ДО ЦВР г. Белорецк Технопарк Научный руководитель: Бодрова Е.А., педагог дополнительного образования |

Белорецк,
2019 г.
Оглавление
Введение
Подготовительные
мероприятия…………………………………………………
Создание
собственного робота9
Конструкция робота
Программирование движения
робота
Используемые конструкторы,
моторы,датчики(модель EV3)
Список использованной
литературы и Интернет-источники
Введение
С
самого раннего возраста родители учат нас не мусорить на улице, всегда убирать
за собой мусор и не бросать его просто так, а обязательно нести в урну. Когда я
иду по улице, я всегда обращаю внимание на чистоту и думаю, какая сложная работа
у дворников. Современные люди стремятся к комфортной жизни в условиях «умной
среды». Труд человека заменяется бытовыми приборами. Дома, снабженные техникой,
подключают к системе «Умный дом», которым хозяин управляет на расстоянии. Роботы
уже давно вошли в нашу жизнь и помогают делать ее проще. Сегодня во многих
сферах деятельности, человека заменяют автоматические устройства, которые
способны не только выполнять много разных операций, но и оперативно переобучаться
с одной операции на другую [3,20]
При
всем при этом на улицах нашего города по-прежнему работают мусороуборочные
машины, в кабинах которых сидят люди, и чистят они исключительно только дороги
и редко тротуары, площади. Осень доставляет немало хлопот дворникам: надо
убирать опавшие листья, подметать дорожки, собирать и утилизировать
накопившийся за лето мусор. Работу дворников тоже может выполнить робот, и
такого робота я решил создать.
Цель: разработка модели автономного робота
уборщика, облегчающего труд дворников по сбору опавших листьев.
Задачи.
·
собрать необходимый информационный
материал по данной теме;
·
изучить алгоритмы движения робота LEGO Mindstorms EV3;
·
создать конструкцию робота, способного в
автоматическом режиме собирать листья и помещать в определенный контейнер;
·
разработать программу для автоматической
работы робота в среде EV3;
·
обработать результаты, сделать выводы и
подготовить презентационный материал.
Для
решения поставленных задач использовался комплекс методов: изучение и
анализ литературы по проблеме исследования, в том числе из сети Интернет, сбор
информационного материала, его анализ; обобщение, эксперимент; формулирование
выводов по результатам исследования.
Подготовительные
мероприятия
Следующим этапом подготовки к работе
было составление плана работы:
1)
изучение проблемы, которую будет решать
робот;
2)
изучение интернет ресурсов, выбор
конструкции изделия;
3)
конструирование корпуса;
4)
конструирование установки захвата листьев;
5)
разработка плана движения робота;
6)
подготовка презентации и разработка
инженерной книги;
Решать экологические проблемы
нужно комплексно, задействуя все доступные инструменты. Все чаще роботы
становятся частью борьбы за «зеленое» будущее, я познакомился с
роботами, помогающие решить экологические проблемы
1) DustClean – уборщик улиц (рис 1)– это часть проекта DustBot итальянских
ученых, с
помощью чувствительных сенсоров робот распознает препятствия, людей и не
представляет опасности для транспортного движения. Уборщик DustClean компактный
и мобильный, он предназначен для работы на узких улицах, в пешеходных зонах.
Для запуска достаточно задать маршрут.
2) DustCart (рис 1) – робот-экотакси вторая
часть итальянского проекта DustBot. Для вызова робота нужно воспользоваться
специальным приложением или отправить СМС. Когда он прибудет к месту вызова,
нужно ввести код на его дисплее, так как услуга является платной, и выбрать тип
отходов. После этого откроется доступ к люку, куда нужно поместить мусорный
мешок[7, 31]

Рисунок 1
3)Сlark (рис 2) – сортировщик на заводе. Этот робот с искусственным интеллектом, запрограммированный на
распознавание и отбор упаковок TetraPak. С помощью камеры Clark сканирует
содержимое сортировочной ленты, при обнаружении нужного вида сырья
роботизированная «рука» с присосками убирает его в отдельный контейнер.Clark
отбирает мусор со скоростью 60 единиц в минуту, точность сортировки – до 90%.

Рисунок 2
4)
Recycler (рис3) – сортировщик строительного мусора. Финская компания
ZenRobotics создала искусственный интеллект для сортировки строительного
мусора. Его научили находить и распознавать около десяти видов отходов.

Рисунок 3
5)
Hoola One (рис 4) – пылесос для пляжей.
Микропластик является одним из опаснейших загрязнителей среды, так как извлечь
его оттуда не представляется возможным. Но появляются изобретения, бросающие
вызов этому утверждению. Пылесос для пляжей Hoola One втягивает в себя песок с
загрязнениями, сортирует содержимое по весу: песок и камни тяжелее, они идут на
дно аппарата и возвращаются на пляж, а пластик отправляется в отдельный
контейнер[7, 46]

Рисунок 4
6)
WasteShark (Рис 5)
– плавающий poбот. WasteShark разработан по прототипу китовой акулы, только
вместо рыб он питается мусором. Робот предназначен для закрытых водных
пространств: порты, пруды, озера

Рисунок 5
7) Social
Trash Box (рис 6) – урна на колесах . Японские ученые создали умные передвижные
урны. Работают они так: 20-литровый контейнер на колесах с помощью датчика
тепла находит человека, приближается к нему, с помощью камеры и
распознавательного алгоритма он идентифицирует мусор в руках людей, затем
звуком и движениями привлекает внимание того, кто держит мусор и просит бросить
его в контейнер.

Рисунок 6
![8)]() Geckon –
Geckon –
уборщик космоса (рис 7) Группа инженеров сконструировала аппарат по образу лапы
геккона. «Лапки» робота оборудованы манипуляторами с поверхностями для захвата
объектов. На них расположены тысячи липких волосков, которые и ловят
космический мусор.

Рисунок 7
9) «Колосс»
– робот-пожарный (рис 8). В 2017 году французская компания Shark
Robotics разработала водонепроницаемого и огнеупорного робота для тушения
пожаров в экстремальных условиях. Для пожарных работа в горящих деревянных
зданиях очень опасна.

Рисунок 8
Прочитав
и проанализировав данную информацию, я считаю, что РОБОТЫ — могут нам помочь:
собирать, сортировать, утилизировать и перерабатывать мусор.
Создание собственного робота:
Цель: выбрать модель будущего
робота и сконструировать его из деталей конструктора LEGO Mindstorms EV3.
Рассмотрение различных вариантов конструкции
робота.
1.
Конструирование корпуса.
2.
Конструирование захватывающего
механизма
3.
Сбор всех частей робота.
В ходе работы над моделью робота, я понял что, для очистки территории чаще всего используют грабли
или жесткие метлы, которыми вооружают дворников, но эти инструменты не слишком
эффективны, а также не универсальны, ведь метлы хорошо подходят только для
очистки твердых и гладких поверхностей, а грабли применяют для очистки неровных
территорий, таких, как: гравийные покрытия, газоны с невысокой травой, участки
с раскисшей от влаги землей или глиной.
Было
принято решение создать робота – листоеда, который на определенной
территории, путем захвата, собирал опавшие листья, попадавшие в специальный
контейнер.
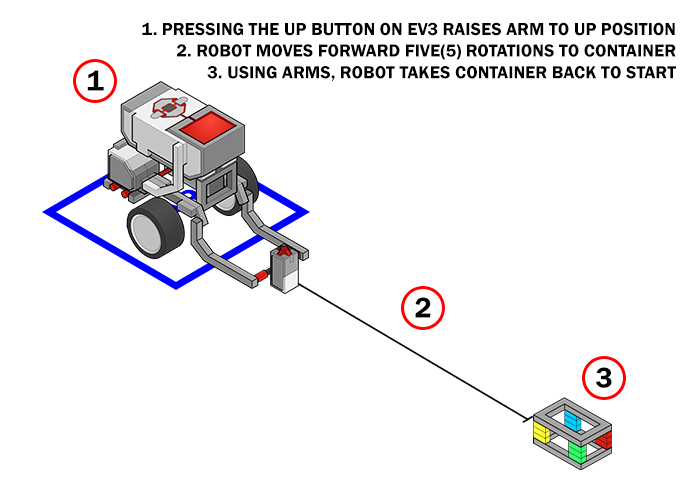
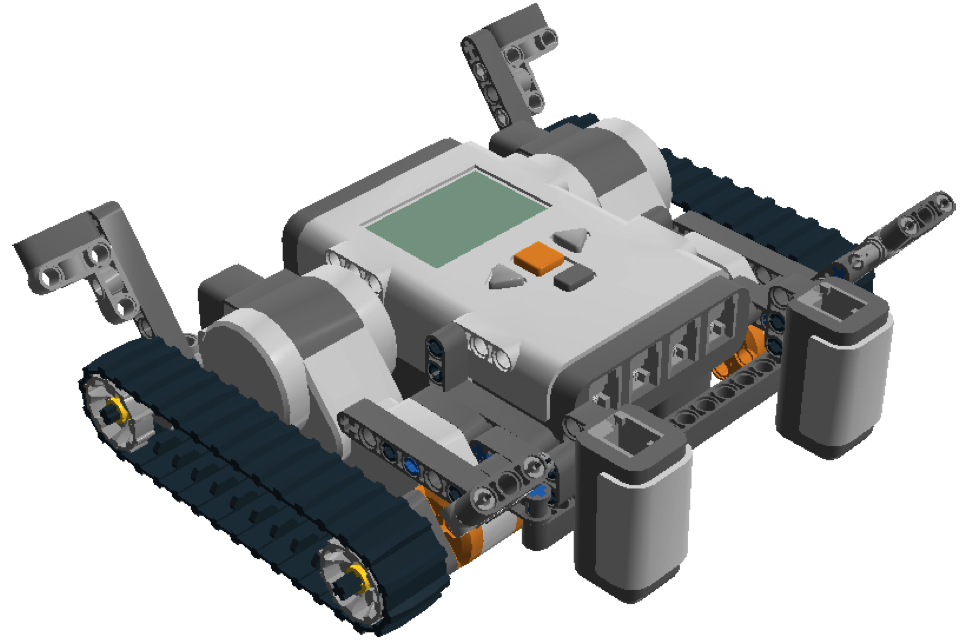
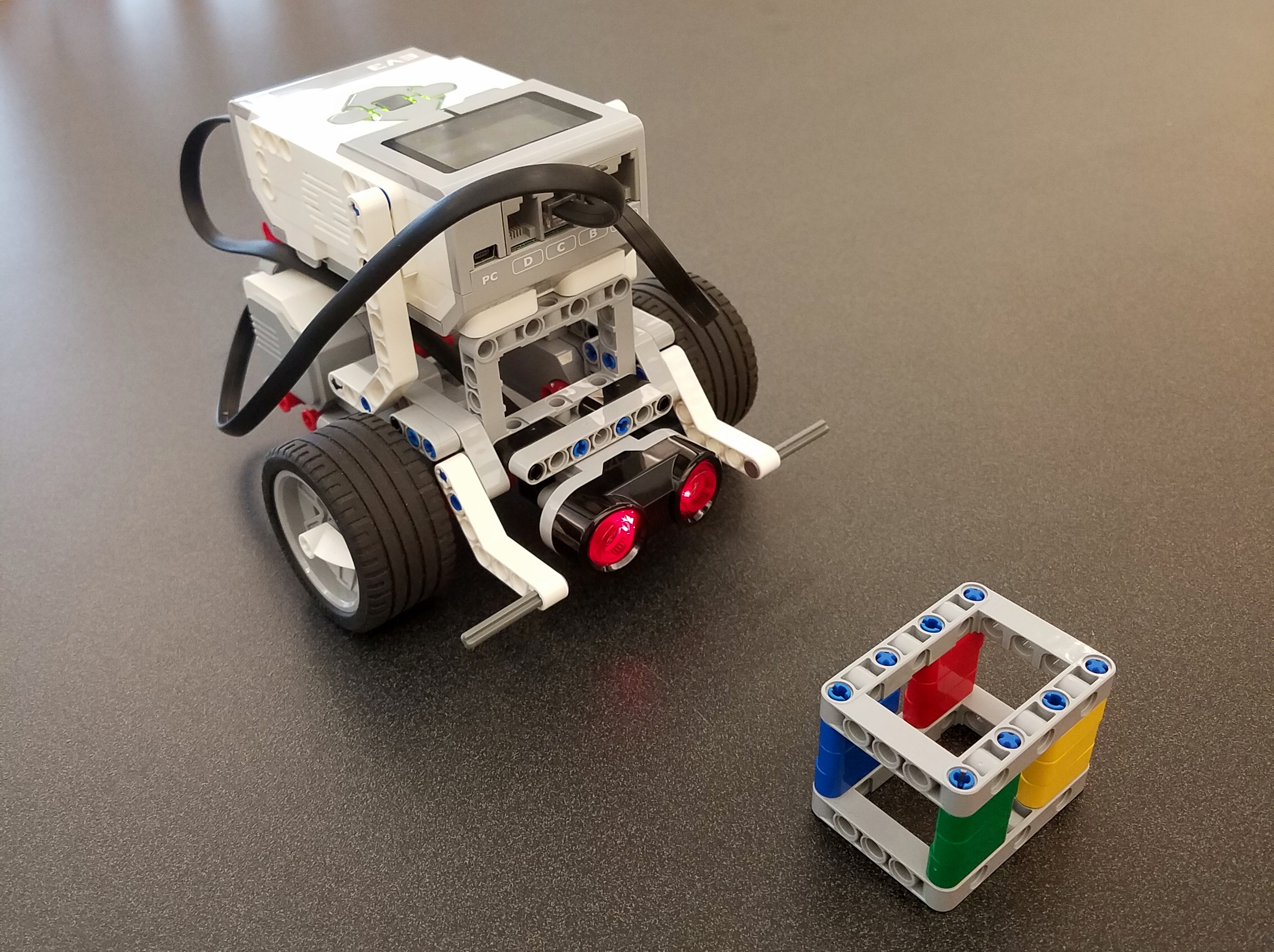
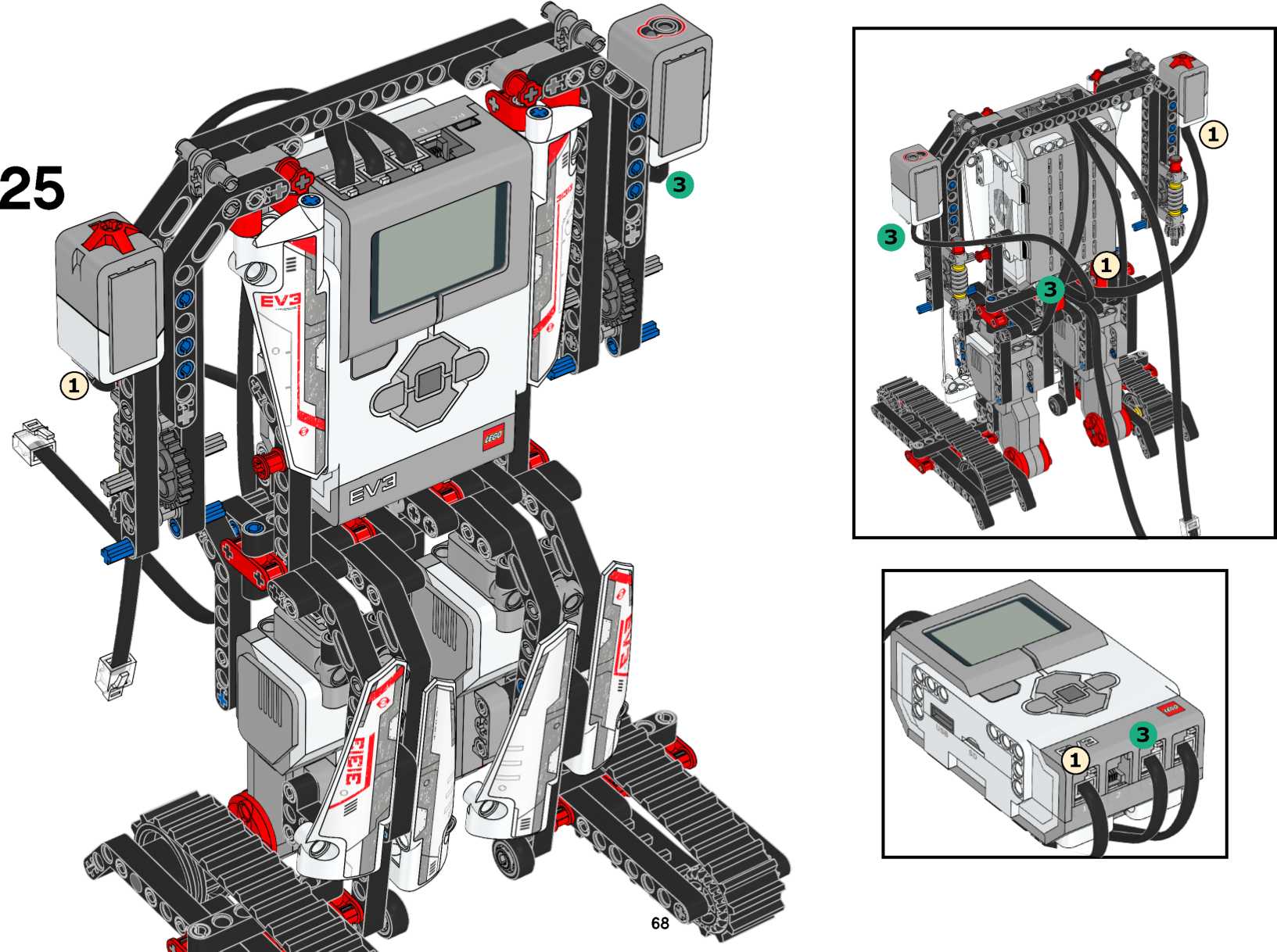
Конструкция
робота-листоеда
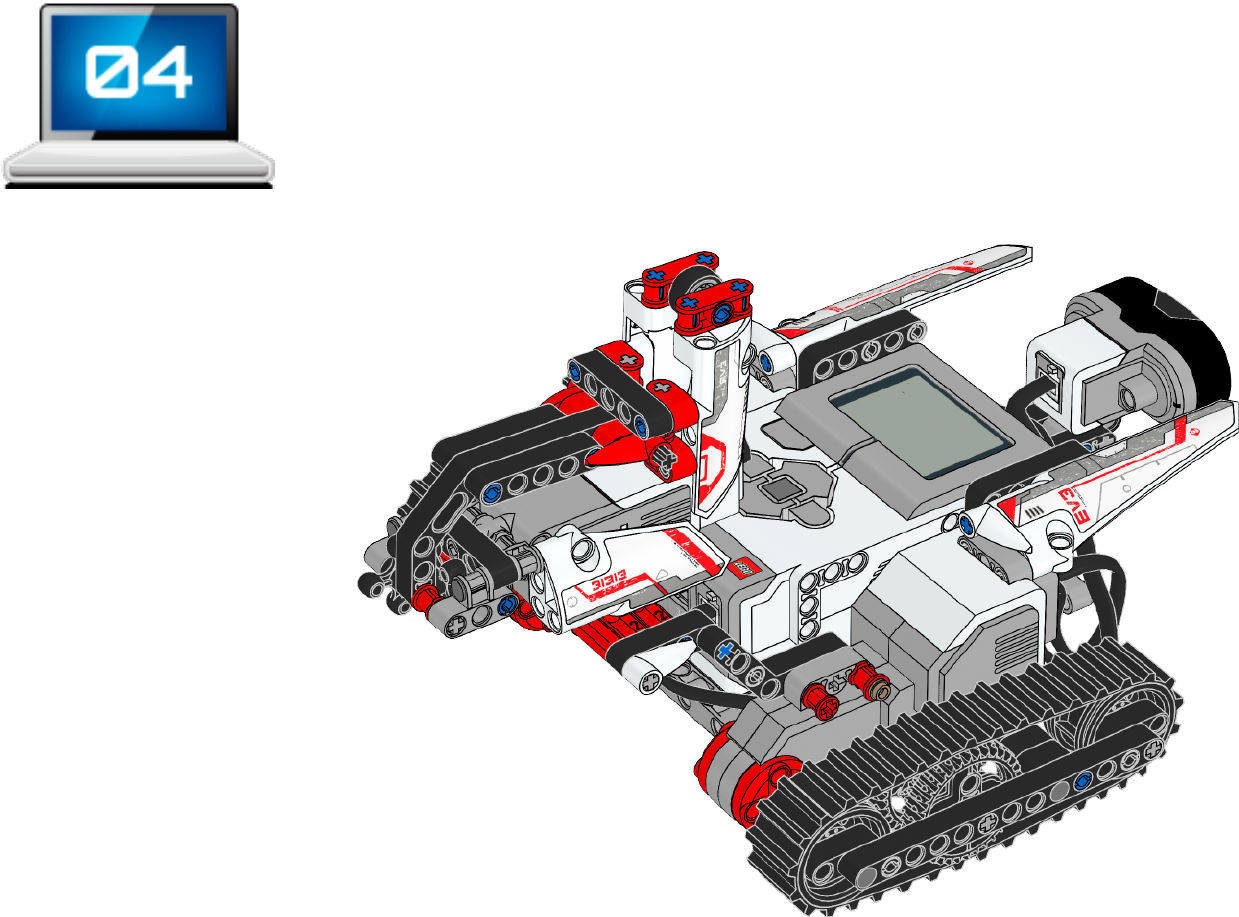
Ходовая
часть.
1) Ходовая часть
робота состоит из двух моторов, подсоединённых к портам B и D,
и двух пар больших колёс.

|
|

2) Добавил вал для захвата листьев

3) Я поставил захватывающий механизм для сбора листьев в
определенный контейнер

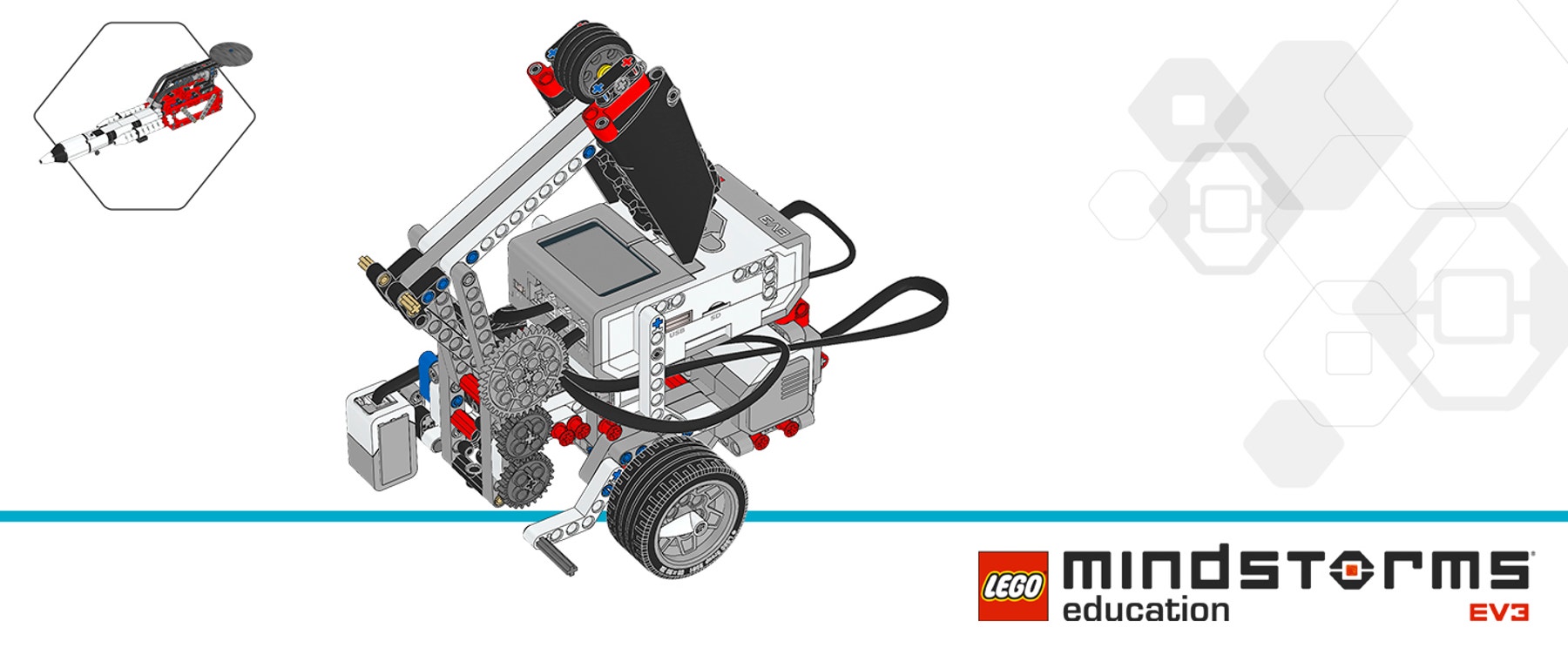
Захватывающий
механизм
Захватывающий
механизм состоит из среднего мотора и 3 зубчатых колёс и гусениц
|
|
|


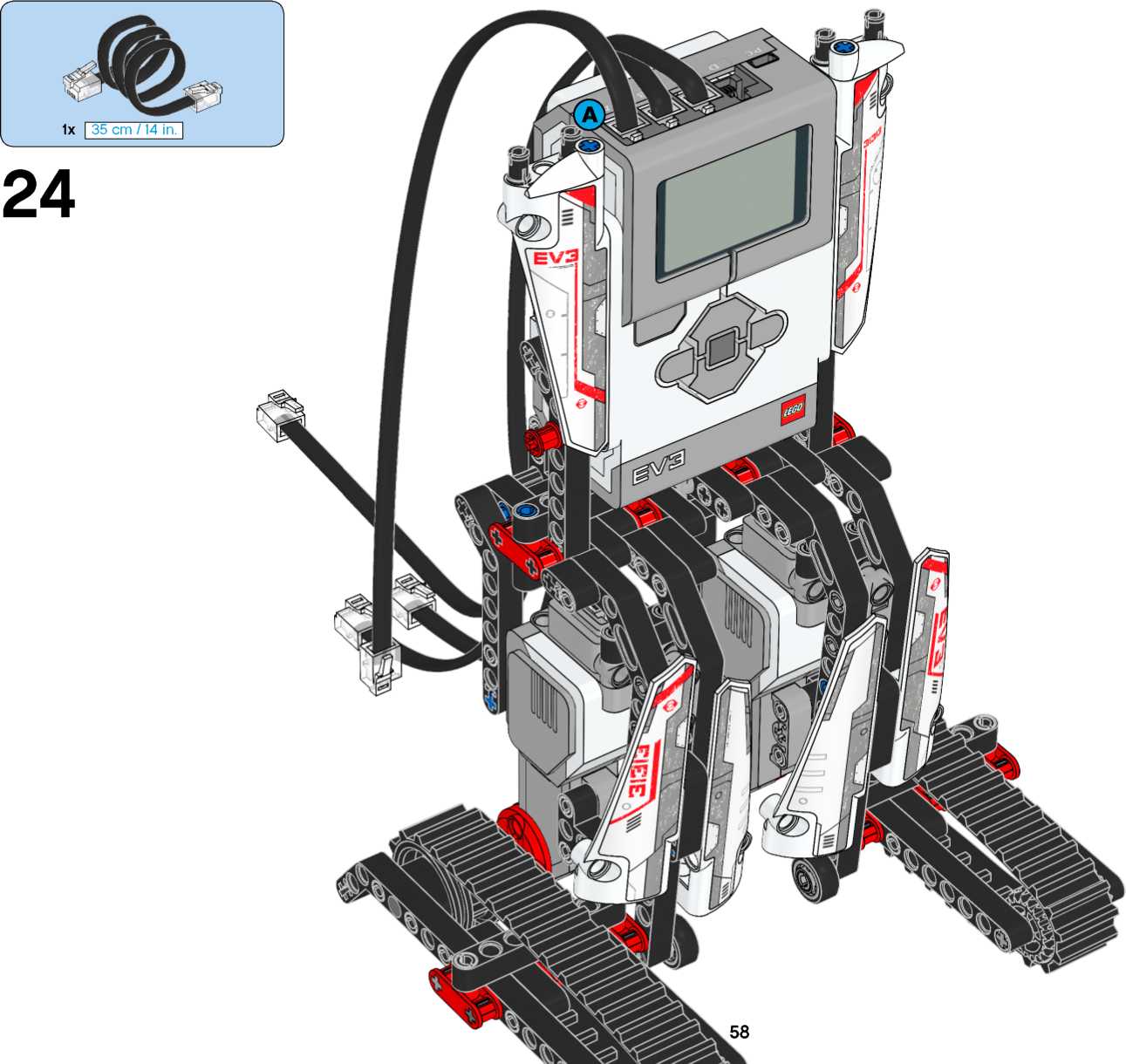
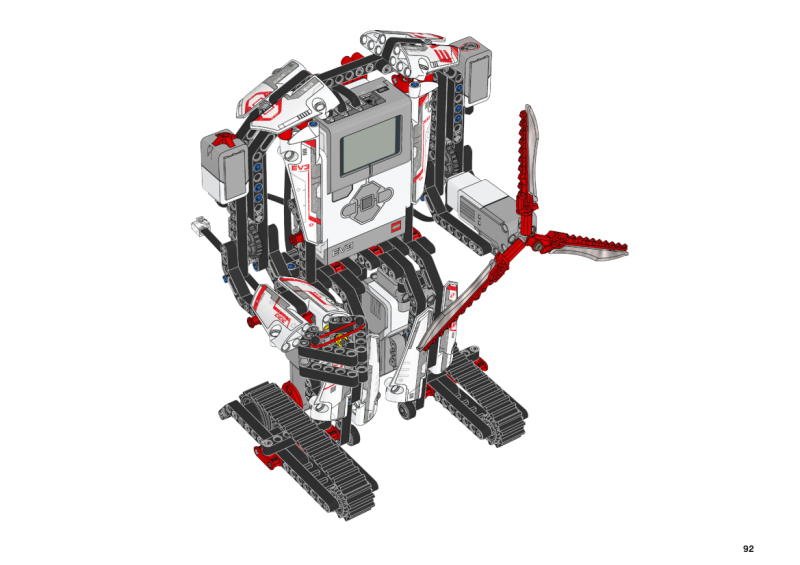
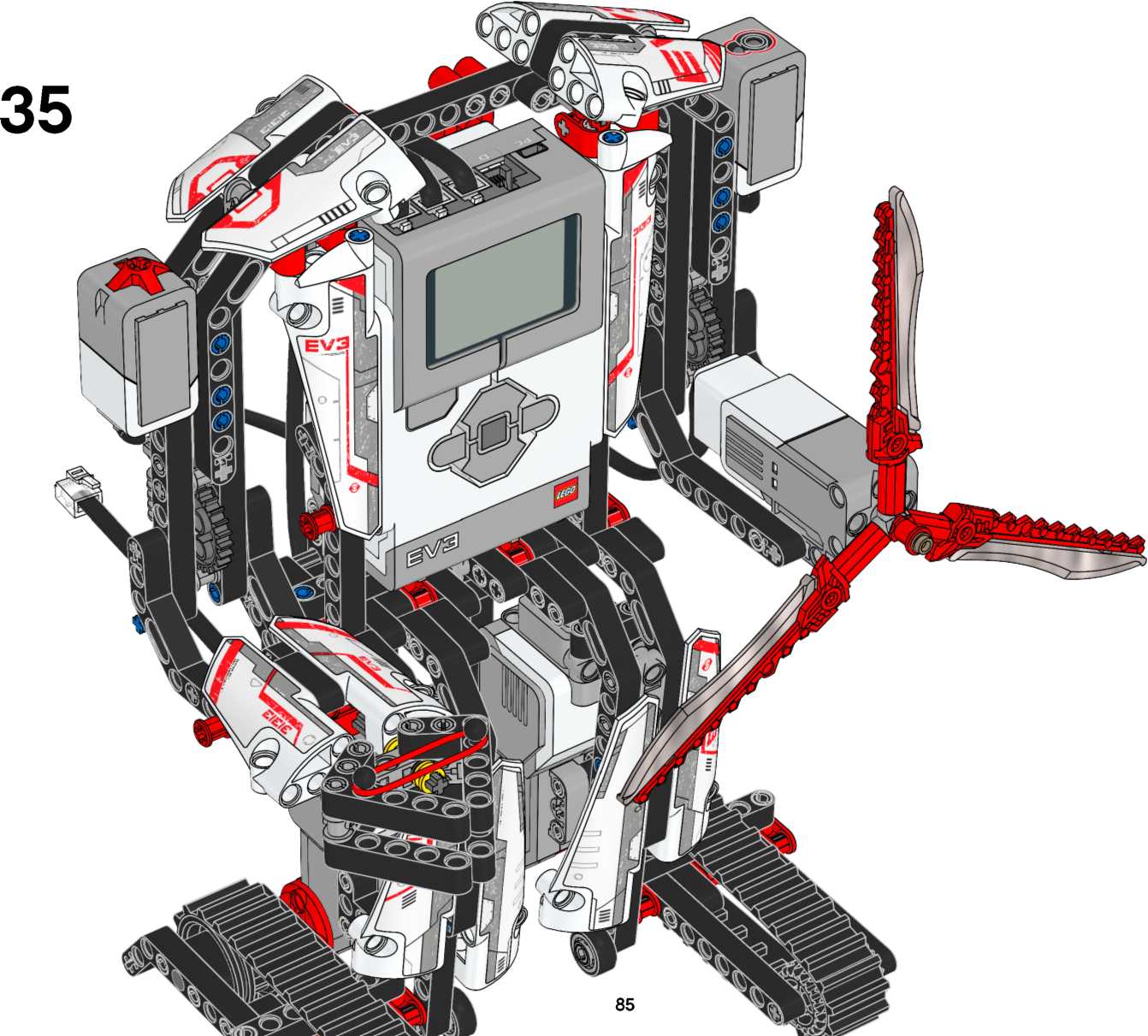
Процесс
сборки


|
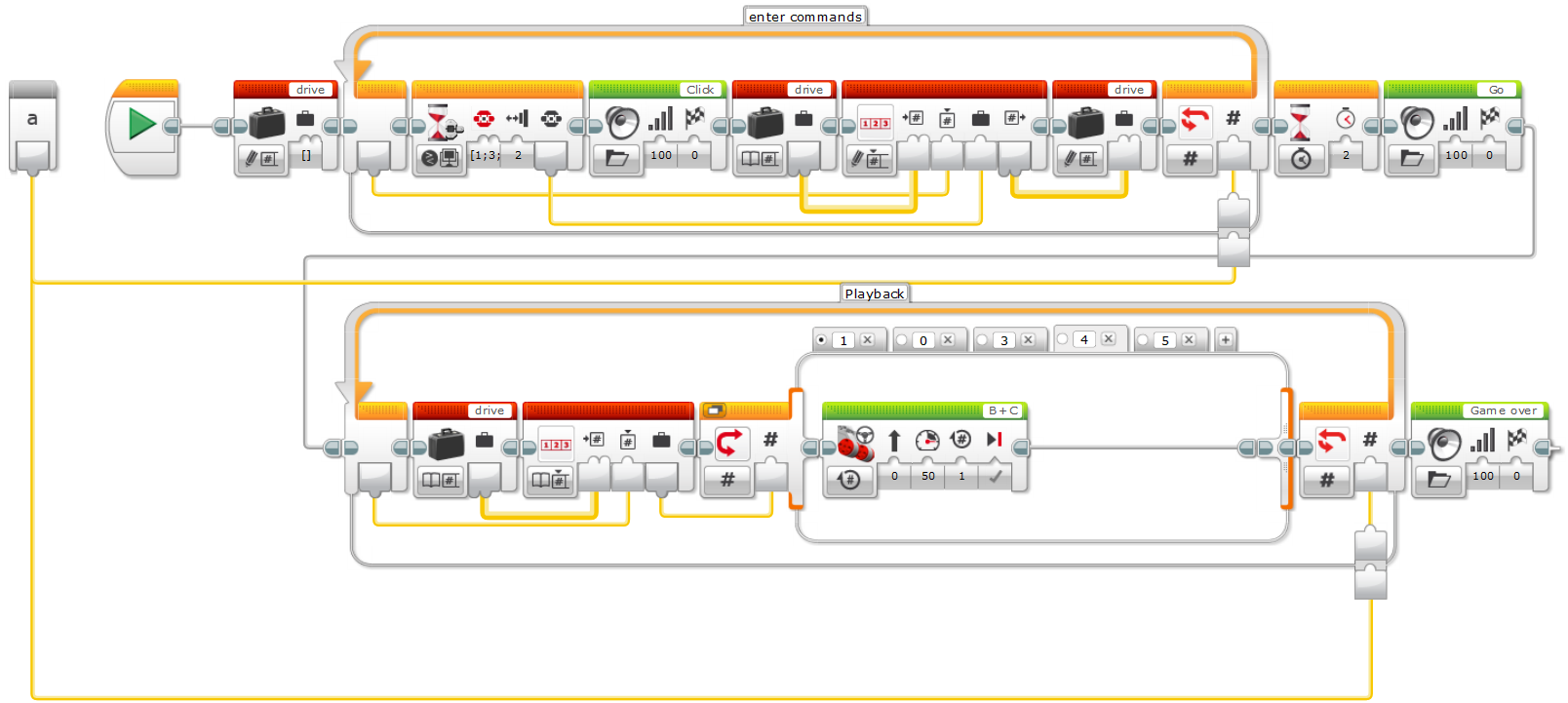
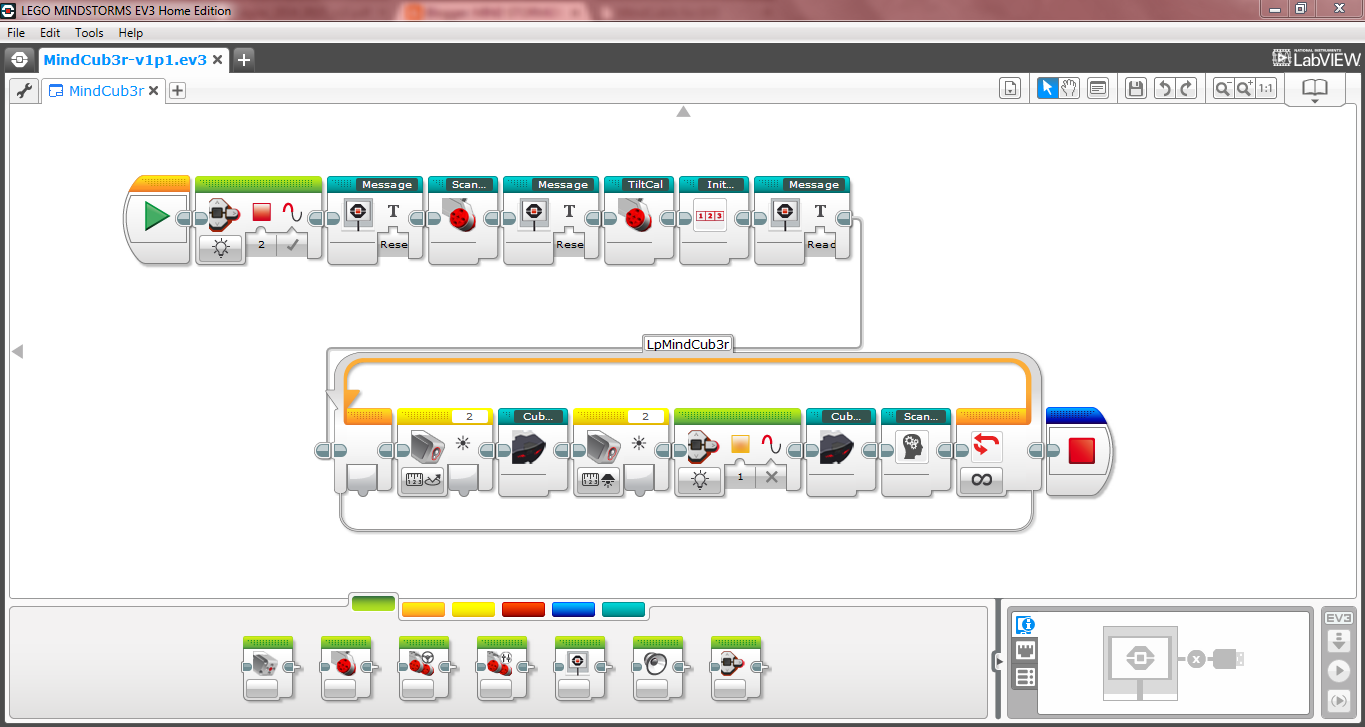
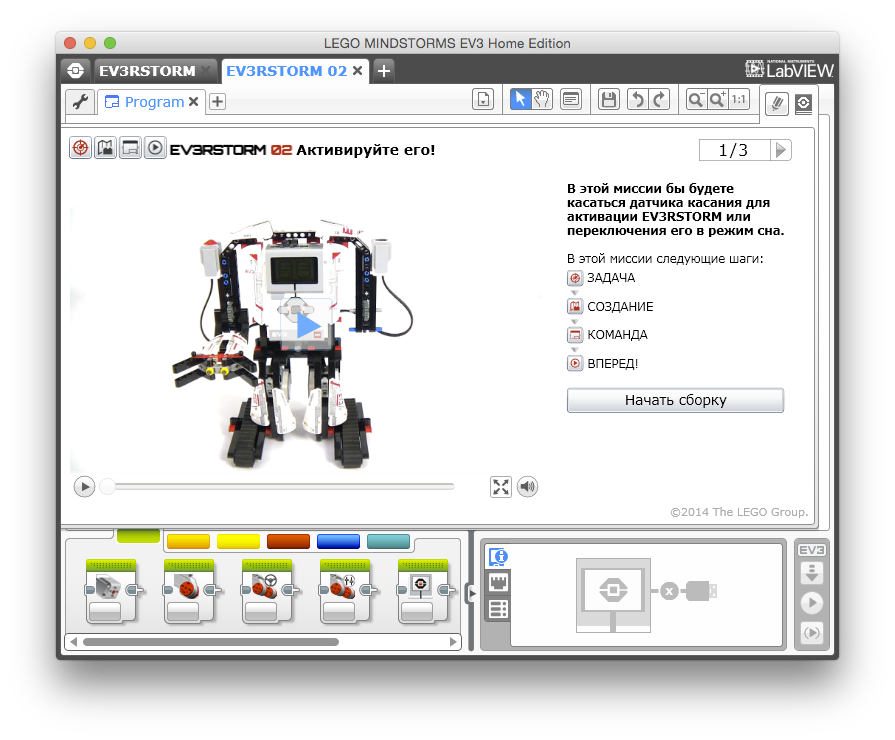
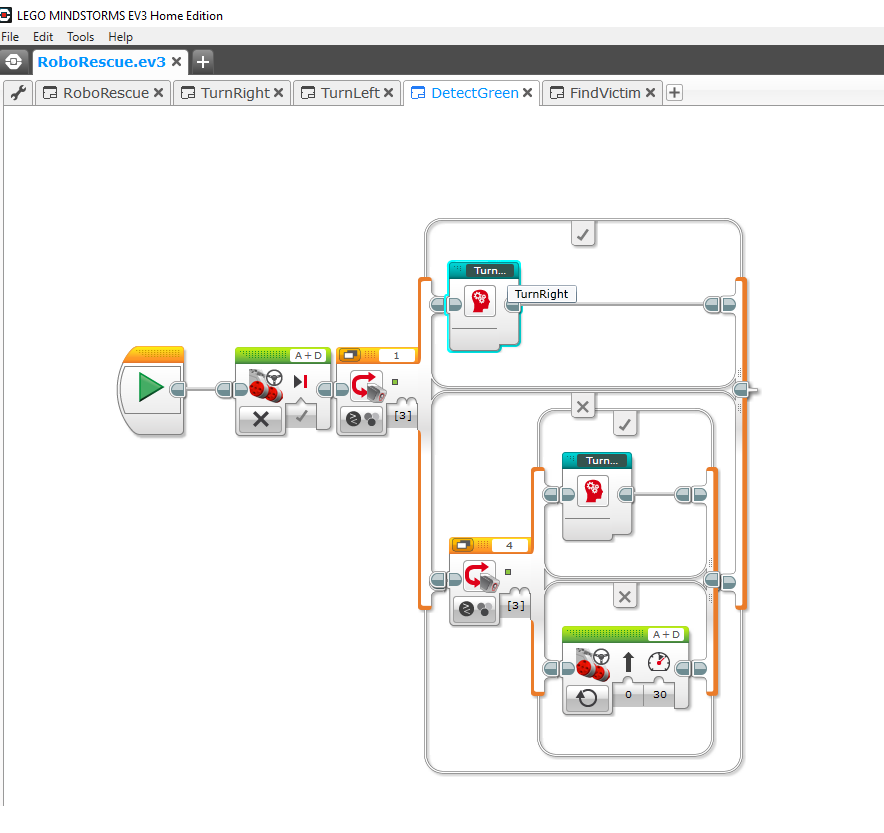
Программирование движения робота 1. Изучение новых блоков языка программирования EV3. 2.Рассмотрение различных алгоритмов выполнения задания. 3.Знакомство с циклом,
|

Выводы: выполнив данный проект, я достиг
своей цели, создал своего собственного робота-листоеда! В результате
проделанной работы я узнал много нового, прочитал много литературы.
Как видите, мой робот не требует
особых навыков
в работе.
Конечно, мой проект не решит все задачи, связанные с уборкой уличной территории, но собрать листья в определенный
контейнер вполне сможет.
Используемые конструкторы
LEGO® MINDSTORMS® EV3
Ресурсный набор LEGO® MINDSTORMS® EV3
Используемые контроллеры, моторы, датчики (модель EV3)
|
Модуль |
Средний |
Большой мотор— 2 шт. |
|
|
|
|



Список
использованной литературы
1. Барсуков,
А.П. Кто есть, кто в робототехнике / А.П. Барсуков. — М.: Книга по Требованию,
2014. — 128 c.
2. Иванов, А. А. Основы
робототехники / А.А. Иванов. — М.: Форум, 2014. — 224 c.
3. Копосов, Д. Г. Первый шаг в
робототехнику. 5-6 классы. Рабочая тетрадь / Д.Г. Копосов. — М.: Бином.
Лаборатория знаний, 2016. — 229 c.
4. Макаров, И. М.
Робототехника. История и перспективы / И.М. Макаров, Ю.И. Топчеев. — М.: Наука,
МАИ, 2017. — 352 c.
5.
Филиппов С.А. Робототехника для детей и родителей. — СПб.: Наука, 2015. – 319
с.
Интернет-источники
6. https://rb.ru/longread/waste-robots/.
7. https://recyclemag.ru/article/robotov-kotorie-pomogayut-reshit-ekologicheskie-problemi
8. https://novate.ru/blogs/140515/31243
9.https://studbooks.net/1677907/tovarovedenie/obschie_svedeniya_shahtnyh_burilnyh_ustanovkah