Технологии и методы программирования.
Лекция 13.
Синхронизация.
В CUDA поддерживается
барьерная синхронизация для потоков
одного блока — synchthread().
Для разных блоков прямой
синхронизации нет- только атомарными
операциями. При этом снижается
производительность системы.
Управление устройствами.
CUDAGetDeviceCount(int *count) – число
доступных устройств.
CUDAGetDevice(int *det) – номер
устройства
CUDAGetDeviceProperties(CUDAdevice *prop, int dev)
– свойства устройства
по его номеру.
CUDASetDevice(int dev) – устанавливает
за программой устройства, на которых
будут выполняться ядра.
Управление памятью.
CUDAMalloc(void **devptr, size_t count) –
выделяет память на
устройстве, возвращает указатель на
эту память.
CUDAFree(void *devptr) – освобождает
память.
CUDAMemcpy(void *dst, const void *sre, size_t
size, enum CUDAMemcpykind kind) – копирует
память. enum CUDAMemcpykind задаёт
направление — от центрального процессора
к графическому или наоборот.
У всех перечисленных функций
возвращаемое значение — CUDAError_T.
Особенности компиляции.
Все функции со спецификатором
device – встраиваемые.
_noinline_ устраняет
это.
По умолчанию небольшие циклы
разворачиваются. Но если указать #pragma
unrall N=1, то это не будет
происходить.
Основные этапы программирования.
1) Разработка функций ядер.
2) Распределение памяти, инициализация
данных.
3) Запуск ядра.
Программирование с использованием
OpenCL.
Отличается оригинальной архитектурой,
иерархией моделей.
Модели:
1) Платформы.
2) Памяти
3) Исполнения
4) Программирования.
Модель платформы.
Платформа — host-система
и несколько устройств. Устройство —
один или более вычислительных модулей.
Модуль — несколько обрабатывающих
элементов. Все вычисления выполняются
именно ими.
Управляющая часть запускается
на хосте. При этом создаётся очередь
команд, передаваемая обрабатывающим
элементам. Элементы одного модуля могут
выполнять поток инструкций по схеме
SIMD или SPMD.
Модель исполнения.
Приложения состоят из двух компонент:
ядер, выполняемых на устройствах, и
управляющих программ, организующих
работу ядер.
Исполнение ядер.
Перед запуском каких-либо функций
определяется пространство индексов.
Каждый экземпляр ядра выполняется для
некоторой точки этого пространства.
Каждый элемент работы получает глобальный
идентификатор. Элементы работы
объединяются в группы, группам также
дают идентификаторы. Их размерность
совпадает с размерностью пространства
индексов. Каждый элемент имеет уникальных
локальный идентификатор. Все элементы
одной группы выполняются на одном
вычислительном модуле. В группе
поддерживается барьерная синхронизация,
а для элементов разных групп — нет.
Стандарт предполагает
использование n-мерного
прстранства индексов, но на практике
реализованы одно-, двух- и трёхмерные
пространства. Пространство определяется
массивом целых чисел. Глобальные и
локальные идентификаторы — n-мерные
вектора. Идентификаторы групп — тоже
массивы с координатами, ограниченными
количеством групп по измерению.
Управляющая программа создаёт
структуру данных — контекст, и определяет
среду исполнения ядер. При этом происходит
выделение и распределение памяти
различных типов, обеспечивается передача
данных, создаётся очередь команд. В этой
очереди присутствуют команды выполнения
ядер, управления памятью, синхронизации.
Интерфейс OpenCL обеспечивает
контроль завершения работы ядра, после
которого возможна передача результатов
в ЦПУ, использование их как входных для
других ядер.
Модель памяти.
-
Глобальная память — доступна каждому
элементу работы. -
Константная — также общедоступна, но
только для чтения (хотя управляющая
программа может писать и в неё). -
Локальная — доступна только в этой
группе. -
Частная память — доступна только для
одного элемента работы. Используется
по умолчанию, для работы с любой другой
памятью необходимо отдельно объявлять
её спецификатором.
Модель программирования.
Две схемы программирования:
-
Параллельное по данным.
-
Параллельное по функциям.
Первое предполагает одновременное
выполнение элементов работы, при котором
любой элемент работы обрабатывает свою
порцию данных, определённую точкой
пространства индексов. Второе предполагает
вычисление нескольких потоков (очередей
команд), исполняющих разные версии
программы. Возможно создание нескольких
очередей для выполнения на нескольких
устройствах.
Соседние файлы в папке Лекции
- #
06.07.201673.19 Кб25Лекция 10.odt
- #
- #
06.07.201668.73 Кб25Лекция 11.odt
- #
- #
06.07.201671.71 Кб25Лекция 12.odt
- #
- #
06.07.201625.73 Кб25Лекция 13.odt
- #
- #
06.07.201665.12 Кб25Лекция 14.odt
- #
- #
06.07.201666.68 Кб25Лекция 2.odt
Технологии и методы программирования.
Лекция 13.
Синхронизация.
В CUDA поддерживается
барьерная синхронизация для потоков
одного блока — synchthread().
Для разных блоков прямой
синхронизации нет- только атомарными
операциями. При этом снижается
производительность системы.
Управление устройствами.
CUDAGetDeviceCount(int *count) – число
доступных устройств.
CUDAGetDevice(int *det) – номер
устройства
CUDAGetDeviceProperties(CUDAdevice *prop, int dev)
– свойства устройства
по его номеру.
CUDASetDevice(int dev) – устанавливает
за программой устройства, на которых
будут выполняться ядра.
Управление памятью.
CUDAMalloc(void **devptr, size_t count) –
выделяет память на
устройстве, возвращает указатель на
эту память.
CUDAFree(void *devptr) – освобождает
память.
CUDAMemcpy(void *dst, const void *sre, size_t
size, enum CUDAMemcpykind kind) – копирует
память. enum CUDAMemcpykind задаёт
направление — от центрального процессора
к графическому или наоборот.
У всех перечисленных функций
возвращаемое значение — CUDAError_T.
Особенности компиляции.
Все функции со спецификатором
device – встраиваемые.
_noinline_ устраняет
это.
По умолчанию небольшие циклы
разворачиваются. Но если указать #pragma
unrall N=1, то это не будет
происходить.
Основные этапы программирования.
1) Разработка функций ядер.
2) Распределение памяти, инициализация
данных.
3) Запуск ядра.
Программирование с использованием
OpenCL.
Отличается оригинальной архитектурой,
иерархией моделей.
Модели:
1) Платформы.
2) Памяти
3) Исполнения
4) Программирования.
Модель платформы.
Платформа — host-система
и несколько устройств. Устройство —
один или более вычислительных модулей.
Модуль — несколько обрабатывающих
элементов. Все вычисления выполняются
именно ими.
Управляющая часть запускается
на хосте. При этом создаётся очередь
команд, передаваемая обрабатывающим
элементам. Элементы одного модуля могут
выполнять поток инструкций по схеме
SIMD или SPMD.
Модель исполнения.
Приложения состоят из двух компонент:
ядер, выполняемых на устройствах, и
управляющих программ, организующих
работу ядер.
Исполнение ядер.
Перед запуском каких-либо функций
определяется пространство индексов.
Каждый экземпляр ядра выполняется для
некоторой точки этого пространства.
Каждый элемент работы получает глобальный
идентификатор. Элементы работы
объединяются в группы, группам также
дают идентификаторы. Их размерность
совпадает с размерностью пространства
индексов. Каждый элемент имеет уникальных
локальный идентификатор. Все элементы
одной группы выполняются на одном
вычислительном модуле. В группе
поддерживается барьерная синхронизация,
а для элементов разных групп — нет.
Стандарт предполагает
использование n-мерного
прстранства индексов, но на практике
реализованы одно-, двух- и трёхмерные
пространства. Пространство определяется
массивом целых чисел. Глобальные и
локальные идентификаторы — n-мерные
вектора. Идентификаторы групп — тоже
массивы с координатами, ограниченными
количеством групп по измерению.
Управляющая программа создаёт
структуру данных — контекст, и определяет
среду исполнения ядер. При этом происходит
выделение и распределение памяти
различных типов, обеспечивается передача
данных, создаётся очередь команд. В этой
очереди присутствуют команды выполнения
ядер, управления памятью, синхронизации.
Интерфейс OpenCL обеспечивает
контроль завершения работы ядра, после
которого возможна передача результатов
в ЦПУ, использование их как входных для
других ядер.
Модель памяти.
-
Глобальная память — доступна каждому
элементу работы. -
Константная — также общедоступна, но
только для чтения (хотя управляющая
программа может писать и в неё). -
Локальная — доступна только в этой
группе. -
Частная память — доступна только для
одного элемента работы. Используется
по умолчанию, для работы с любой другой
памятью необходимо отдельно объявлять
её спецификатором.
Модель программирования.
Две схемы программирования:
-
Параллельное по данным.
-
Параллельное по функциям.
Первое предполагает одновременное
выполнение элементов работы, при котором
любой элемент работы обрабатывает свою
порцию данных, определённую точкой
пространства индексов. Второе предполагает
вычисление нескольких потоков (очередей
команд), исполняющих разные версии
программы. Возможно создание нескольких
очередей для выполнения на нескольких
устройствах.
Соседние файлы в папке Лекции
- #
06.07.201673.19 Кб23Лекция 10.odt
- #
- #
06.07.201668.73 Кб23Лекция 11.odt
- #
- #
06.07.201671.71 Кб23Лекция 12.odt
- #
- #
06.07.201625.73 Кб23Лекция 13.odt
- #
- #
06.07.201665.12 Кб23Лекция 14.odt
- #
- #
06.07.201666.68 Кб23Лекция 2.odt
Чтобы дать более полное представление о многопроцессорных вычислительных системах, помимо высокой производительности необходимо назвать и другие отличительные особенности. Прежде всего, это необычные архитектурные решения, направленные на повышение производительности (работа с векторными операциями, организация быстрого обмена сообщениями между процессорами или организация глобальной памяти в многопроцессорных системах и др.).
Понятие архитектуры высокопроизводительной системы является достаточно широким, поскольку под архитектурой можно понимать и способ параллельной обработки данных, используемый в системе, и организацию памяти, и топологию связи между процессорами, и способ исполнения системой арифметических операций. Попытки систематизировать все множество архитектур впервые были предприняты в конце 60-х годов и продолжаются по сей день.
В 1966 г. М. Флинном (Flynn) был предложен чрезвычайно удобный подход к классификации архитектур вычислительных систем. В его основу было положено понятие потока, под которым понимается последовательность элементов, команд или данных, обрабатываемая процессором.
Соответствующая система классификации основана на рассмотрении числа потоков инструкций и потоков данных и описывает четыре архитектурных класса:
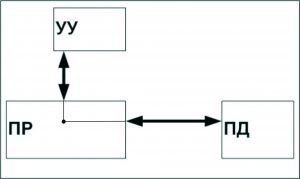
- SISD (Single Instruction Single Data) – 1 поток команд и 1 поток данных.
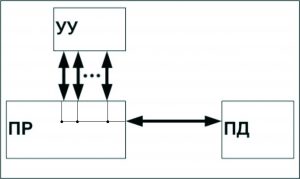
- MISD (Multiple Instruction Single Data) – несколько потоков команд и 1 поток данных.
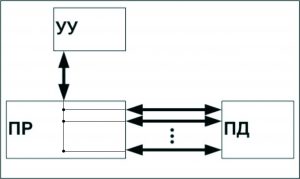
- SIMD (Single Instruction Multiple Data) – 1 поток команд и несколько потоков данных.
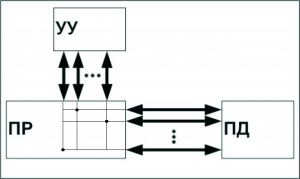
- MIMD (Multiple Instruction Multiple Data) – несколько потоков команд и несколько потоков данных.
|
|
|
|
Рисунок 5.1 – Архитектура SISD, 1 поток команд и 1 поток данных |
Рисунок 5.2 – Архитектура MISD, несколько потоков команд и 1 поток данных |
|
|
|
|
Рисунок 5.3 – Архитектура SIMD, 1 поток команд и несколько потоков данных |
Рисунок 5.4 – MIMD, несколько потоков команд и несколько потоков данных |
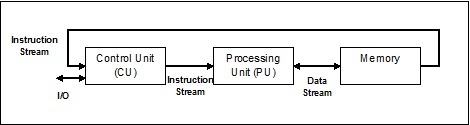
SISD (single instruction stream / single data stream) – одиночный поток команд и одиночный поток данных. К этому классу относятся последовательные компьютерные системы, которые имеют один центральный процессор, способный обрабатывать только один поток последовательно исполняемых инструкций.
В настоящее время практически все высокопроизводительные системы имеют более одного центрального процессора, однако каждый из них выполняет несвязанные потоки инструкций, что делает такие системы комплексами SISD-систем, действующих на разных пространствах данных.
Для увеличения скорости обработки команд и скорости выполнения арифметических операций может применяться конвейерная обработка. В случае векторных систем векторный поток данных следует рассматривать как поток из одиночных неделимых векторов.
Примерами компьютеров с архитектурой SISD могут служить большинство рабочих станций Compaq, Hewlett-Packard и Sun Microsystems.
MISD (multiple instruction stream / single data stream) – множественный поток команд и одиночный поток данных. Теоретически в этом типе машин множество инструкций должно выполняться над единственным потоком данных. До сих пор ни одной реальной машины, попадающей в данный класс, создано не было. В качестве аналога работы такой системы, по-видимому, можно рассматривать работу банка. С любого терминала можно подать команду и что-то сделать с имеющимся банком данных. Поскольку база данных одна, а команд много, мы имеем дело с множественным потоком команд и одиночным потоком данных.
SIMD (single instruction stream / multiple data stream) – одиночный поток команд и множественный поток данных. Эти системы обычно имеют большое количество процессоров (от 1024 до 16384), которые могут выполнять одну и ту же инструкцию относительно разных данных в жесткой конфигурации. Единственная инструкция параллельно выполняется над многими элементами данных.
Примерами SIMD-машин являются системы CPP DAP, Gamma II и Quadrics Apemille.
Другим подклассом SIMD-систем являются векторные компьютеры. Векторные компьютеры манипулируют массивами сходных данных подобно тому, как скалярные машины обрабатывают отдельные элементы таких массивов. Это делается за счет использования специально сконструированных векторных центральных процессоров. Когда данные обрабатываются посредством векторных модулей, результаты могут быть выданы на один, два или три такта частотогенератора (такт частотогенератора является основным временным параметром системы). При работе в векторном режиме векторные процессоры обрабатывают данные практически параллельно, что делает их в несколько раз более быстрыми, чем при работе в скалярном режиме. Примерами систем подобного типа являются, например, компьютеры Hitachi S3600.
MIMD (multiple instruction stream / multiple data stream) – множественный поток команд и множественный поток данных. Эти машины параллельно выполняют несколько потоков инструкций над различными потоками данных. В отличие от упомянутых выше многопроцессорных SISD-машин, команды и данные связаны, потому что они представляют различные части одной и той же задачи. Например, MIMD-системы могут параллельно выполнять множество подзадач с целью сокращения времени выполнения основной задачи.
Большое разнообразие попадающих в MIMD класс вычислительных систем делает классификацию Флинна не полностью адекватной. Действительно, и четырехпроцессорный SX-5 компании NEC, и тысячепроцессорный Cray T3E попадают в этот класс. Это заставляет использовать другой подход к классификации, иначе описывающий классы компьютерных систем.
Другой подход к классификации состоит в разделении вычислительных систем по способам обработки множественного потока команд.
Одним конвейерным устройством обработки, работающем в режиме разделения времени для отдельных потоков. Такая возможность используется в MIMD-компьютерах, которые обычно называют конвейерными или векторными. В основе векторных компьютеров лежит концепция конвейеризации, т.е. явного сегментирования арифметического устройства на отдельные части, каждая из которых выполняет свою подзадачу для пары операндов.
Каждый поток обрабатывается своим собственным устройством. Такая возможность используется в параллельных компьютерах. В основе параллельного компьютера лежит идея использования для решения одной задачи нескольких процессоров, работающих сообща, причем процессоры могут быть как скалярными, так и векторными.
Классификация архитектур вычислительных систем нужна для того, чтобы понять особенности работы той или иной архитектуры, но она не является достаточно детальной, чтобы на нее можно было опираться при создании МВС, поэтому следует вводить более детальную классификацию, которая связана с различными архитектурами ЭВМ и с используемым оборудованием.
Аннотация: В данной лекции дается определение понятия архитектуры высокопроизводительной системы, приводится классификация архитектур, основанная на рассмотрении числа потоков инструкций и потоков данных.
Чтобы дать более полное представление о многопроцессорных вычислительных системах, помимо высокой производительности необходимо назвать и другие отличительные особенности. Прежде всего, это необычные архитектурные решения, направленные на повышение производительности (работа с векторными операциями, организация быстрого обмена сообщениями между процессорами или организация глобальной памяти в многопроцессорных системах и др.).
Понятие архитектуры высокопроизводительной системы является достаточно широким, поскольку под архитектурой можно понимать и способ параллельной обработки данных, используемый в системе, и организацию памяти, и топологию связи между процессорами, и способ исполнения системой арифметических операций. Попытки систематизировать все множество архитектур впервые были предприняты в конце 60-х годов и продолжаются по сей день.
В 1966 г. М.Флинном (Flynn) был предложен чрезвычайно удобный подход к классификации архитектур вычислительных систем. В его основу было положено понятие потока, под которым понимается последовательность элементов, команд или данных, обрабатываемая процессором. Соответствующая система классификации основана на рассмотрении числа потоков инструкций и потоков данных и описывает четыре архитектурных класса:
SISD = Single Instruction Single Data MISD = Multiple Instruction Single Data SIMD = Single Instruction Multiple Data MIMD = Multiple Instruction Multiple Data
SISD (single instruction stream / single data stream) – одиночный поток команд и одиночный поток данных. К этому классу относятся последовательные компьютерные системы, которые имеют один центральный процессор, способный обрабатывать только один поток последовательно исполняемых инструкций. В настоящее время практически все высокопроизводительные системы имеют более одного центрального процессора, однако каждый из них выполняет несвязанные потоки инструкций, что делает такие системы комплексами SISD-систем, действующих на разных пространствах данных. Для увеличения скорости обработки команд и скорости выполнения арифметических операций может применяться конвейерная обработка. В случае векторных систем векторный поток данных следует рассматривать как поток из одиночных неделимых векторов. Примерами компьютеров с архитектурой SISD могут служить большинство рабочих станций Compaq, Hewlett-Packard и Sun Microsystems.
MISD (multiple instruction stream / single data stream) – множественный поток команд и одиночный поток данных. Теоретически в этом типе машин множество инструкций должно выполняться над единственным потоком данных. До сих пор ни одной реальной машины, попадающей в данный класс, создано не было. В качестве аналога работы такой системы, по-видимому, можно рассматривать работу банка. С любого терминала можно подать команду и что-то сделать с имеющимся банком данных. Поскольку база данных одна, а команд много, мы имеем дело с множественным потоком команд и одиночным потоком данных.
SIMD (single instruction stream / multiple data stream) – одиночный поток команд и множественный поток данных. Эти системы обычно имеют большое количество процессоров, от 1024 до 16384, которые могут выполнять одну и ту же инструкцию относительно разных данных в жесткой конфигурации. Единственная инструкция параллельно выполняется над многими элементами данных. Примерами SIMD-машин являются системы CPP DAP, Gamma II и Quadrics Apemille. Другим подклассом SIMD-систем являются векторные компьютеры. Векторные компьютеры манипулируют массивами сходных данных подобно тому, как скалярные машины обрабатывают отдельные элементы таких массивов. Это делается за счет использования специально сконструированных векторных центральных процессоров. Когда данные обрабатываются посредством векторных модулей, результаты могут быть выданы на один, два или три такта частотогенератора (такт частотогенератора является основным временным параметром системы). При работе в векторном режиме векторные процессоры обрабатывают данные практически параллельно, что делает их в несколько раз более быстрыми, чем при работе в скалярном режиме. Примерами систем подобного типа являются, например, компьютеры Hitachi S3600.
MIMD (multiple instruction stream / multiple data stream) – множественный поток команд и множественный поток данных. Эти машины параллельно выполняют несколько потоков инструкций над различными потоками данных. В отличие от упомянутых выше многопроцессорных SISD-машин, команды и данные связаны, потому что они представляют различные части одной и той же задачи. Например, MIMD-системы могут параллельно выполнять множество подзадач с целью сокращения времени выполнения основной задачи. Большое разнообразие попадающих в данный класс систем делает классификацию Флинна не полностью адекватной. Действительно, и четырехпроцессорный SX-5 компании NEC, и тысячепроцессорный Cray T3E попадают в этот класс. Это заставляет использовать другой подход к классификации, иначе описывающий классы компьютерных систем. Основная идея такого подхода может состоять, например, в следующем. Будем считать, что множественный поток команд может быть обработан двумя способами: либо одним конвейерным устройством обработки, работающем в режиме разделения времени для отдельных потоков, либо каждый поток обрабатывается своим собственным устройством. Первая возможность используется в MIMD-компьютерах, которые обычно называют конвейерными или векторными, вторая – в параллельных компьютерах. В основе векторных компьютеров лежит концепция конвейеризации, т.е. явного сегментирования арифметического устройства на отдельные части, каждая из которых выполняет свою подзадачу для пары операндов. В основе параллельного компьютера лежит идея использования для решения одной задачи нескольких процессоров, работающих сообща, причем процессоры могут быть как скалярными, так и векторными.
Классификация архитектур вычислительных систем нужна для того, чтобы понять особенности работы той или иной архитектуры, но она не является достаточно детальной, чтобы на нее можно было опираться при создании МВС, поэтому следует вводить более детальную классификацию, которая связана с различными архитектурами ЭВМ и с используемым оборудованием.
Архитектура системы–совокупность свойств системы, существенных для пользования.
Архитектурой компьютера называется его описание на некотором общем уровне, включающее описание пользовательских возможностей программирования, системы команд, системы адресации, организации памяти и т.д. Архитектура определяет принципы действия, информационные связи и взаимное соединение основных логических узлов компьютера: процессора, оперативного ЗУ, внешних ЗУ и периферийных устройств. Общность архитектуры разных компьютеров обеспечивает их совместимость с точки зрения пользователя.
Наиболее распространены следующие архитектурные решения.
Классическая архитектура (архитектура фон Неймана) — одно арифметико-логическое устройство (АЛУ), через которое проходит поток данных, и одно устройство управления (УУ), через которое проходит поток команд — программа. Это однопроцессорный компьютер.

К этому типу архитектуры относится и архитектура персонального компьютера с общей шиной. Все функциональные блоки здесь связаны между собой общей шиной, называемой также системной магистралью.
Физически магистраль представляет собой многопроводную линию с гнездами для подключения электронных схем. Совокупность проводов магистрали разделяется на отдельные группы: шину адреса, шину данных и шину управления.
Периферийные устройства (принтер и др.) подключаются к аппаратуре компьютера через специальные контроллеры — устройства управления периферийными устройствами.
Контроллер — устройство, которое связывает периферийное оборудование или каналы связи с центральным процессором, освобождая процессор от непосредственного управления функционированием данного оборудования.
Многопроцессорная архитектура. Наличие в компьютере нескольких процессоров означает, что параллельно может быть организовано много потоков данных и много потоков команд. Таким образом, параллельно могут выполняться несколько фрагментов одной задачи.
Многомашинная вычислительная система. Здесь несколько процессоров, входящих в вычислительную систему, не имеют общей оперативной памяти, а имеют каждый свою (локальную). Каждый компьютер в многомашинной системе имеет классическую архитектуру, и такая система применяется достаточно широко. Однако эффект от применения такой вычислительной системы может быть получен только при решении задач, имеющих очень специальную структуру: она должна разбиваться на столько слабо связанных подзадач, сколько компьютеров в системе.
Преимущество в быстродействии многопроцессорных и многомашинных вычислительных систем перед однопроцессорными очевидно.
Архитектура с параллельными процессорами. Здесь несколько АЛУ работают под управлением одного УУ. Это означает, что множество данных может обрабатываться по одной программе — то есть по одному потоку команд. Высокое быстродействие такой архитектуры можно получить только на задачах, в которых одинаковые вычислительные операции выполняются одновременно на различных однотипных наборах данных.
Самой ранней и наиболее известной является классификация архитектур вычислительных систем, предложенная в 1966 году М.Флинном. Классификация базируется на понятии потока, под которым понимается последовательность элементов, команд или данных, обрабатываемая процессором. На основе числа потоков команд и потоков данных Флинн выделяет четыре класса архитектур: SISD,MISD,SIMD,MIMD.
SISD (single instruction stream / single data stream) – одиночный поток команд и одиночный поток данных. К этому классу относятся последовательные компьютерные системы, которые имеют один центральный процессор, способный обрабатывать только один поток последовательно исполняемых инструкций. В настоящее время практически все высокопроизводительные системы имеют более одного центрального процессора, однако каждый из них выполняет несвязанные потоки инструкций, что делает такие системы комплексами SISD-систем, действующих на разных пространствах данных. Для увеличения скорости обработки команд и скорости выполнения арифметических операций может применяться конвейерная обработка. В случае векторных систем векторный поток данных следует рассматривать как поток из одиночных неделимых векторов. Примерами компьютеров с архитектурой SISD могут служить большинство рабочих станций Compaq, Hewlett-Packard и Sun Microsystems.
MISD (multiple instruction stream / single data stream) – множественный поток команд и одиночный поток данных. Теоретически в этом типе машин множество инструкций должно выполняться над единственным потоком данных. До сих пор ни одной реальной машины, попадающей в данный класс, создано не было. В качестве аналога работы такой системы, по-видимому, можно рассматривать работу банка. С любого терминала можно подать команду и что-то сделать с имеющимся банком данных. Посколькубаза данных одна, а команд много, мы имеем дело с множественным потоком команд и одиночным потоком данных.
SIMD (single instruction stream / multiple data stream) – одиночный поток команд и множественный поток данных. Эти системы обычно имеют большое количество процессоров, от 1024 до 16384, которые могут выполнять одну и ту же инструкцию относительно разных данных в жесткой конфигурации. Единственная инструкция параллельно выполняется над многими элементами данных. Примерами SIMD-машин являются системы CPP DAP, Gamma II и Quadrics Apemille. Другим подклассом SIMD-систем являются векторные компьютеры. Векторные компьютеры манипулируют массивами сходных данных подобно тому, как скалярные машины обрабатывают отдельные элементы таких массивов. Это делается за счет использования специально сконструированных векторных центральных процессоров. Когда данные обрабатываются посредством векторных модулей, результаты могут быть выданы на один, два или три такта частотогенератора (такт частотогенератора является основным временным параметром системы). При работе в векторном режиме векторные процессоры обрабатывают данные практически параллельно, что делает их в несколько раз более быстрыми, чем при работе в скалярном режиме. Примерами систем подобного типа являются, например, компьютеры Hitachi S3600.
MIMD (multiple instruction stream / multiple data stream) – множественный поток команд и множественный поток данных. Эти машины параллельно выполняют несколько потоков инструкций над различными потоками данных. В отличие от упомянутых выше многопроцессорных SISD-машин, команды и данные связаны, потому что они представляют различные части одной и той же задачи. Например, MIMD-системы могут параллельно выполнять множество подзадач с целью сокращения времени выполнения основной задачи. Большое разнообразие попадающих в данный класссистем делает классификацию Флинна не полностью адекватной, поэтому существуют дополненные и расширенные классификации, именованные фамилиями разработчиков.
Классификация архитектур вычислительных систем нужна для того, чтобы понять особенности работы той или иной архитектуры, но она не является достаточно детальной, чтобы на нее можно было опираться при создании МВС, поэтому следует вводить более детальную классификацию, которая связана с различными архитектурами ЭВМ и с используемым оборудованием.
Источники:
https://helpiks.org/6-1433.html
Существуют различные стили архитектуры системы и памяти, которые необходимо учитывать при разработке программы или параллельной системы. Это очень необходимо, потому что одна система и стиль памяти могут быть подходящими для одной задачи, но могут быть подвержены ошибкам другой задачи.
Архитектуры компьютерных систем, поддерживающие параллелизм
Майкл Флинн в 1972 году дал таксономию для классификации различных стилей архитектуры компьютерной системы. Эта таксономия определяет четыре различных стиля следующим образом:
- Один поток команд, один поток данных (SISD)
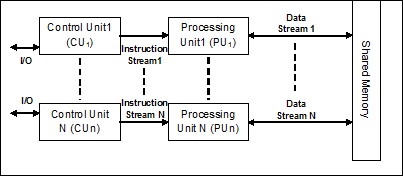
- Один поток инструкций, несколько потоков данных (SIMD)
- Поток с несколькими инструкциями, один поток данных (MISD)
- Многократный поток команд, многократный поток данных (MIMD).
Один поток команд, один поток данных (SISD)
Как следует из названия, системы такого типа будут иметь один последовательный входящий поток данных и один единственный блок обработки для выполнения потока данных. Они похожи на однопроцессорные системы с параллельной вычислительной архитектурой. Ниже приводится архитектура SISD –
Преимущества СИСД
Преимущества архитектуры SISD следующие:
- Это требует меньше энергии.
- Нет проблем со сложным протоколом связи между несколькими ядрами.
Недостатки СИСД
Недостатки архитектуры SISD следующие:
- Скорость архитектуры SISD ограничена, как и у одноядерных процессоров.
- Это не подходит для больших приложений.
Один поток инструкций, несколько потоков данных (SIMD)
Как следует из названия, системы такого типа будут иметь несколько входящих потоков данных и количество блоков обработки, которые могут выполнять одну инструкцию в любой момент времени. Они похожи на многопроцессорные системы с параллельной вычислительной архитектурой. Ниже приводится архитектура SIMD –
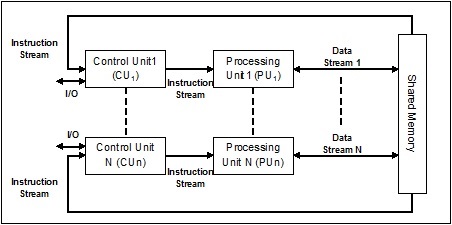
Лучший пример для SIMD – это видеокарты. Эти карты имеют сотни отдельных процессоров. Если говорить о разнице в вычислениях между SISD и SIMD, то для массивов добавления [5, 15, 20] и [15, 25, 10] архитектура SISD должна будет выполнить три различные операции добавления. С другой стороны, с архитектурой SIMD, мы можем добавить одну операцию добавления.
Преимущества SIMD
Преимущества SIMD-архитектуры следующие:
-
Одна и та же операция над несколькими элементами может быть выполнена с использованием только одной инструкции.
-
Пропускная способность системы может быть увеличена за счет увеличения количества ядер процессора.
-
Скорость обработки выше, чем у архитектуры SISD.
Одна и та же операция над несколькими элементами может быть выполнена с использованием только одной инструкции.
Пропускная способность системы может быть увеличена за счет увеличения количества ядер процессора.
Скорость обработки выше, чем у архитектуры SISD.
Недостатки SIMD
Недостатки SIMD-архитектуры следующие:
- Существует сложная связь между числами ядер процессора.
- Стоимость выше, чем у архитектуры SISD.
Поток нескольких данных с одной инструкцией (MISD)
Системы с потоком MISD имеют количество блоков обработки, выполняющих разные операции, выполняя разные инструкции для одного и того же набора данных. Ниже приводится архитектура MISD –
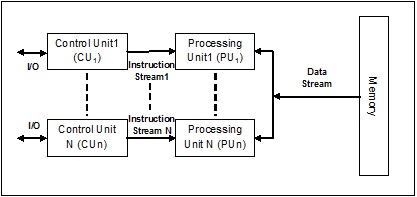
Представители архитектуры MISD еще не существуют коммерчески.
Поток нескольких данных с несколькими командами (MIMD)
В системе, использующей архитектуру MIMD, каждый процессор в многопроцессорной системе может выполнять разные наборы команд независимо от другого набора данных, установленного параллельно. Это противоположно архитектуре SIMD, в которой одна операция выполняется над несколькими наборами данных. Ниже приводится архитектура MIMD –
Обычный мультипроцессор использует архитектуру MIMD. Эти архитектуры в основном используются в ряде областей применения, таких как автоматизированное проектирование / автоматизированное производство, моделирование, моделирование, переключатели связи и т. Д.
Архитектуры памяти, поддерживающие параллелизм
При работе с такими понятиями, как параллелизм и параллелизм, всегда необходимо ускорить выполнение программ. Одним из решений, найденных разработчиками компьютеров, является создание нескольких компьютеров с общей памятью, то есть компьютеров, имеющих единственное физическое адресное пространство, доступ к которому имеют все ядра процессора. В этом сценарии может быть несколько разных стилей архитектуры, но вот три важных стиля архитектуры:
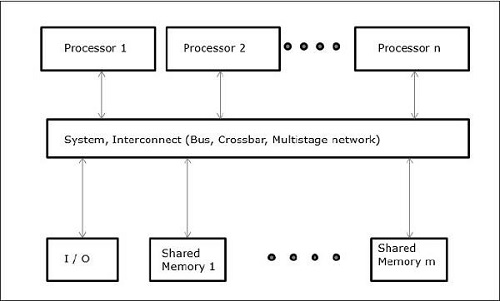
UMA (унифицированный доступ к памяти)
В этой модели все процессоры равномерно распределяют физическую память. Все процессоры имеют одинаковое время доступа ко всем словам памяти. Каждый процессор может иметь личную кеш-память. Периферийные устройства следуют ряду правил.
Когда все процессоры имеют равный доступ ко всем периферийным устройствам, система называется симметричным мультипроцессором . Когда только один или несколько процессоров могут получить доступ к периферийным устройствам, система называется асимметричным мультипроцессором .
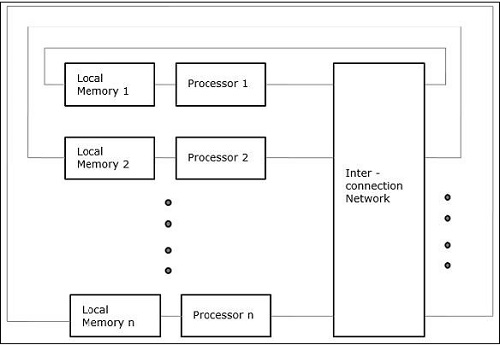
Неоднородный доступ к памяти (NUMA)
В многопроцессорной модели NUMA время доступа зависит от местоположения слова памяти. Здесь разделяемая память физически распределяется между всеми процессорами, называемой локальной памятью. Коллекция всей локальной памяти образует глобальное адресное пространство, к которому могут обращаться все процессоры.
Архитектура кэш-памяти только (COMA)
Модель COMA является специализированной версией модели NUMA. Здесь все распределенные основные памяти преобразуются в кэш-память.
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 26 апреля 2017 года; проверки требуют 6 правок.
| Одиночный поток команд (single instruction) |
Множество потоков команд (multiple instruction) |
|
|---|---|---|
| Одиночный поток данных (single data) |
SISD (ОКОД) |
MISD (МКОД) |
| Множество потоков данных (multiple data) |
SIMD (ОКМД) |
MIMD (МКМД) |

SIMD (англ. single instruction, multiple data — одиночный поток команд, множественный поток данных, ОКМД) — принцип компьютерных вычислений, позволяющий обеспечить параллелизм на уровне данных. Один из классов вычислительных систем в классификации Флинна.
SIMD-компьютеры состоят из одного командного процессора (управляющего модуля), называемого контроллером, и нескольких модулей обработки данных, называемых процессорными элементами. Управляющий модуль принимает, анализирует и выполняет команды. Если в команде встречаются данные, контроллер рассылает на все процессорные элементы команду, и эта команда выполняется на нескольких или на всех процессорных элементах. Каждый процессорный элемент имеет свою собственную память для хранения данных. Одним из преимуществ данной архитектуры считается то, что в этом случае более эффективно реализована логика вычислений. До половины логических инструкций обычного процессора связано с управлением выполнением машинных команд, а остальная их часть относится к работе с внутренней памятью процессора и выполнению арифметических операций. В SIMD-компьютере управление выполняется контроллером, а «арифметика» отдана процессорным элементам.
Векторные процессоры также использовали принцип SIMD, одной командой могли обрабатываться векторы размером до нескольких тысяч элементов.
SIMD-расширения различных архитектур[править | править код]
Короткие SIMD инструкции (64 или 128 бит) стали появляться в процессорах общего назначения в 1990-х годах. В разной степени следующие процессорные архитектуры поддерживают SIMD-расширения или SIMD-инструкции:
- DEC Alpha — Motion Video Instructions (MVI)
- IBM PowerPC: AltiVec, SPE
- HP’s PA-RISC Multimedia Acceleration eXtensions (MAX)
- Intel: MMX, iwMMXt, SSE, SSE2, SSE3, SSSE3, SSE4.x, AVX, AVX2
- AMD: 3DNow!
- ARC: ARC Video subsystem
- SPARC: VIS, VIS2
- Sun: MAJC
- ARM: NEON
- MIPS: MDMX (MaDMaX), MIPS-3D
- RISC-V: P-extension
Группа из IBM, Sony, Toshiba совместно разработала для процессора Cell Processor сопроцессор SPU, набор команд которого в значительной степени использовал SIMD. NXP (Philips) разработала несколько SIMD-процессоров Xetal, в котором имелось 320 процессорных элементов, работавших с 16-битными данными.
Современные видеоускорители (GPU) обычно основаны на SIMD-архитектуре с поддержкой векторов длины 128, 256 или более бит.
Расширение Advanced Vector Extensions компании Intel предоставляет набор SIMD-инструкций для обработки данных в формате с плавающей запятой в группах длиной 256 бит. Сопроцессоры Intel MIC включают в себя 512-битный набор инструкций.
x86-совместимые процессоры[править | править код]
|
|
Информация в этой статье или некоторых её разделах устарела. Вы можете помочь проекту, обновив её и убрав после этого данный шаблон. |
- MMX — Multimedia Extensions. Коммерческое название дополнительного набора инструкций, выполняющих характерные для процессов кодирования/декодирования потоковых аудио-/видеоданных действия за одну машинную инструкцию. Впервые появился в процессорах Pentium MMX.
- MMX Extended — расширенный набор инструкций MMX, используемый в процессорах AMD и Cyrix.
- 3DNow! — расширение набора команд MMX процессоров AMD, начиная с AMD K6-2.
- 3DNow! Extended — расширение набора команд 3DNow! процессоров AMD, начиная с AMD Athlon.
- SSE — набор инструкций, разработанный Intel и впервые представленный в процессорах серии Pentium III.
- SSE2 — набор инструкций, разработанный Intel и впервые представленный в процессорах серии Pentium 4.
- SSE3 — третья версия SIMD-расширения Intel, потомок SSE, SSE2 и x87. Представлен 2 февраля 2004 года в ядре Prescott процессора Pentium 4.
- SSSE3 — набор SIMD-инструкций, используемый в процессорах Intel Core 2 Duo.
- SSE4 — новая версия SIMD-расширения Intel. Анонсирован 27 сентября 2006 года. Представлен в 2007 году в процессорах серии Penryn.
- AVX — анонсированная версия SIMD-расширения Intel, которая представлена в 2010 году в процессорах архитектуры Sandy Bridge.
- AVX2
- AVX512 — расширение системы команд при помощи кодировки с префиксом EVEX.
См. также[править | править код]
- Таксономия Флинна
- Система команд
- Список систем команд
- Архитектура набора команд
- Расширения архитектуры x86


Классификация архитектур вычислительных систем по Флинну. Какие существуют типы параллелизма? Организация памяти при параллельной обработки данных.
Классификация архитектур вычислительных систем по Флинну
Как известно, из классификаций архитектур вычислительных систем самой первой и наиболее известной является представленная в 1966 [1] году М.Флинном. Данная классификация основывается на понятии потока – последовательность команд, элементов или данных, обрабатываемая процессором. Флинн выделяет четыре класса архитектур на основе числа потоков команд и потоков данных: SISD,MISD,SIMD,MIMD.
SISD (single instruction stream / single data stream) – одиночный поток команд и одиночный поток данных. К данному классу принадлежат классические последовательные машины, или их ещё называют, машины фон-неймановского типа. Данные машины имеют только один поток команд, обрабатывающиеся последовательно друг за другом и каждая команда инициирует одну операцию с одним потоком данных. Все однопоточные программы используют вычислительную систему в этом режиме.
SIMD (single instruction stream / multiple data stream) – одиночный поток команд и множественный поток данных. Подобного рода архитектуры сохраняют один поток команд, включающий, векторные команды, в отличие от предыдущего класса. Это позволяет выполнять одну арифметическую операцию сразу над многими данными – элементами вектора. Примерами SIMD-машин являются системы CPP DAP, Gamma II и Quadrics Apemille. Другим подклассом SIMD-систем являются векторные компьютеры.
MISD (multiple instruction stream / single data stream) – множественный поток команд и одиночный поток данных. Данный класс предполагает, что в архитектуре имеется множество процессоров, которые обрабатывают один и тот же поток данных. Однако до сих пор нет реального примера существования вычислительной системы, построенной на данном принципе. Как аналог работы такой системы, можно представить работу банка. С любого терминала можно подать команду и что-то сделать с имеющимся банком данных. Так как база данных одна, а команд много, то это и будет множественный поток команд и одиночный поток данных.
MIMD (multiple instruction stream / multiple data stream) – множественный поток команд и множественный поток данных. В данном классе, обрабатывается несколько данных, для которых выполняется несколько команд. К данному классу можно отнести многоядерные системы, а также все суперскалярные процессоры в общем виде.
В книге К.Ванга и Ф.Бриггса [2] сделаны некоторые дополнения к классификации Флина. Оставляя четыре ранее введенных базовых класса (SISD, SIMD, MISD, MIMD), авторы внесли следующие изменения.
Класс SISD разбивается на два подкласса:
- архитектуры с единственным функциональным устройством, например, PDP-11;
- архитектуры, имеющие в своем составе несколько функциональных устройств — CDC 6600, CRAY-1, FPS AP-120B, CDC Cyber 205, FACOM VP-200.
В класс SIMD также вводится два подкласса:
- архитектуры с пословно-последовательной обработкой информации — ILLIAC IV, PEPE, BSP;
- архитектуры с разрядно-последовательной обработкой — STARAN, ICL DAP.
В классе MIMD авторы различают:
- вычислительные системы со слабой связью между процессорами, к которым они относят все системы с распределенной памятью, например, Cosmic Cube,
- и вычислительные системы с сильной связью (системы с общей памятью), куда попадают такие компьютеры, как C.mmp, BBN Butterfly, CRAY Y-MP, Denelcor HEP.
Типы параллелизма
В источнике [3] выделяют четыре типа параллелизма: параллелизм на уровне битов, команд, данных, а также задач.
Параллелизм на уровне битов
При реализации операций обеспечивается максимальное распараллеливание, так, например, при осуществление сложения битов числа все биты машинного слова одновременно складываются, а так же используются специальный механизм учета переносов [4]. Чтобы увеличить диапазон чисел, обрабатываемых одной командой, следует увеличить размер машинного слова. Так, выполнен переход от 8-ми до 16-ти и далее к 32 разрядному машинному слову. На данный момент процессоры имеют 64-разрядное машинное слово, некоторые команды могут работать с 128-разрядными данными (процессор Larrabee работает с данными размером 512 битов). При использование машинного слова с большей разрядностью быстрее обрабатываются большие числа. Чтобы обработать 32-битное число для 16-битной машины требуется как минимум 2 команды, а для 32-битной – только одна. Но это верно не для всех 64-битных процессоров, ведь в них реализованы не все операции над 64-битными числами. так же ограничено использование команд, которые в результате дают 128-битные числа и числа большей разрядности.
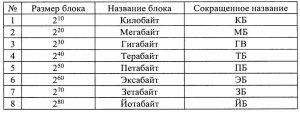
Для определения диапазона адресного пространства также используется машинное слово. Вычислительная система работает с диапазоном адресного пространства, так как оно используется для задания адреса. Для 32-битных вычислительных систем максимальный адрес -1, адресное пространство составляет 4 ГБ. Для 64-битного машинного слова адресное пространство составляет или 16 ГБ. В табл. 1 представлены названия единиц измерения памяти.
таблица 1
У первых вычислительных систем все числа занимали как минимум одно машинное слово, это приводило к неэффективному распределению памяти при задании небольших чисел. Для обеспечения эффективного распределения памяти в нынешних вычислительных системах, следует использовать данные разной длинны. Необходимость увеличения адресного пространства также является следствием усложнения решаемых задач. Для того, чтобы эффективно использовать 64-битные процессоры следует использовать операционную систему для работы с процессорами в 64-х битном режиме, а не использовать возможности этих процессоров работать в 32-битном режиме. Система Linux была первой операционной системой, которая полностью поддерживала работу процессора в этом режиме, далее появилась версия Microsoft Windows XP и Vista. На сегодняшний момент уже используются системы с оперативной памятью 16 ГБ, серверы с оперативной памятью 256ГБ, 8ГБ модули с оперативной памятью в серийном производстве.
Далее следует рассмотреть собственно параллелизм. Его можно реализовать как с помощью конвейера, так и суперескалярности, т.е. наличия нескольких независимых блоков для выполнения команд.
Параллелизм на уровне команд. Конвейер
Давно уже известна идея использования конвейера для увеличения производительности выполнения сложных операций. Происходит деление команды на независимые микрокоманды, время выполнения которых примерно одинаково. Количество микрокоманд равно числу блоков конвейера. Блоки конвейера последовательно обрабатывают очередную команду, выполняя ее микрокоманды. Полностью выполненной команда считается только после завершения обработки последним блоком конвейера.
Конвейерный принцип выполнения команд впервые был использован в машине ATLAS, 1962 г. [5], разработанной в Манчестерском университете. Выделяют 4 стадии выполнения команд: выборка команды, вычисление адреса операнда, выборка операнда и выполнение операции. Для Pentium в конвейер добавлен еще один блок записи результата. С помощью конвейеризации получилось уменьшить время выполнения команд с 6 до 1,6 микросекунд.
Время выполнения одной команды при ее последовательном выполнении от начала до конца примем за 1. Если конвейер состоит из m устройств (ступеней), то длина конвейер равна m. Если не брать в расчет накладные расходы, связанные с «перемещением» результатов выполнения предыдущих операций, то чтобы выполнить одну микрооперацию потребуется 1/m единиц времени. Далее выясним время выполнения программы, которая состоит из n последовательных команд без конвейера и с конвейером. Без конвейера потребуется n единиц времени (при том что время выполнения одной команды принято за 1).
Если использовать конвейер, то первая команда будет выполняться 1 единицу, а каждая очередная команда будет заканчиваться с интервалом 1/m единиц времени. Общее время выполнения такой программы равно 1+(n–1)/m.
Сравним полученные значения для n=100 команд и m=5 блоков конвейера. Без конвейера потребуется T1=100 (единиц времени), с конвейером T2=1+99/5=21 (единиц времени), т.е. почти в 5 раз быстрее. Конвейер позволяет увеличить производительность процессора, что интересно коэффициент ускорения почти прямо пропорционален длине конвейера. Именно поэтому длина конвейера для современных процессоров значительно больше 5. Конвейер Pentium 4 состоит из 35 блоков. Фактически увеличение числа блоков конвейера эквивалентно увеличению тактовой частоты, так как приводит к уменьшению времени выполнения одной команды.
Возникает тогда такой вопрос: можно ли бесконечно увеличивать число блоков конвейера? Нет, так как увеличение числа блоков способствует усложнению архитектуры процессора, увеличивает его тепловыделение. Время выполнения микрокоманды становится соизмеримым с накладными расходами, это уменьшает эффективность использования конвейера. Незнание свойств конвейера может поспособствовать потери производительности. Доказательством этого можно представить данный пример. Пусть в программе используется команда перехода. Для конвейера длиной 5 блоков адрес перехода определяется блоком 3, команду выполняет блок № 4 т.е. блоки второй половины конвейера. К моменту выполнения команды очередные 3 команды уже будут обработаны, несмотря на необходимость обрабатывать совсем другие команды. Такую ситуацию называют остановом конвейера. После того как определились адреса перехода, результаты обработки очередных команд должны быть аннулированы, а следующая команда, находящаяся по адресу перехода, начинает выполняться сначала. Если увеличить длину конвейера соответственно произойдет увеличение потерь, связанных с использованием команд перехода. Современные процессоры имеют блоки прогнозирования переходов, которые уменьшают потери, связанные с наличием команд перехода. Знание алгоритмов предсказания позволит снизить потери, связанные с командами перехода. Далее будут рассмотрены некоторые из них.
Команды сериализации
Конвейер считается одним из способов параллельного выполнения команды. Команды процессора имеют особые команды, которые чтобы начать выполнение ждут завершения всех начатых команд. При их выполнении другие команды не выполняются, данные команды имеют название команды сериализации. Приведем пример команды сериализации – команда cupid, использующаяся для определения особенностей процессора. Чтобы увеличить точность измерения времени, данную команду следует использовать перед началом и в конце замеров.
Предсказание переходов
Имеет свое начало с процессора типа Pentium. Дает возможность уменьшить потери производительности конвейера из-за наличия переходов.
Существует статистическое и динамическое предсказание. Для команд перехода, выполняющиеся в первый раз, используется статистическое предсказание. Для процессора типа Pentium – должна выполняться следующая команда, т.е. фактически нет предсказания.
Для процессоров имеющих более совершенный вид считалось, что ссылка вперед – перехода не будет, а ссылка назад – что переход будет. Это потому что, ссылка назад соответствует циклу, а пишутся циклы чтобы многократно выполнять один и тот же участок кода. Поэтому, статистическое предсказание верно, когда оператор условного перехода при первом его выполнении перехода не существует, т.е. имеет место естественный порядок выполнения команд. Исключением являются только циклы.
В процесс статистического предсказания команда заноситься в буфер предсказания перехода вместе с адресом, куда фактически выполняется переход. Так же устанавливается флаг в 1, если переход был.
Динамическое предсказание для Pentium. Данное предсказание применяется для команд перехода, выполняющихся повторно и которые уже имеют информацию. Каждая команда перехода имеет свой адрес (Адрес1), адрес, куда необходимо перейти (Адрес2) и битовые флаги (два флага). Если хотя бы один флаг из двух установлен в 1, то прогнозируется наличие перехода. Прогнозируется отсутствие перехода, при обоих флагах равны 0.
В дальнейшем в зависимости от того имеется переход или нет, значения флагов корректируются. Если переход есть и есть флаг, равный 0, то он устанавливается в 1. Если перехода нет и есть флаг равный 1, то он сбрасывается в 0. Данный алгоритм способствует минимизации числа ошибок, если очень маленькая вероятность наличия или отсутствия переходов. Если наличие переходов и их отсутствие равновероятны, то вероятность ошибок максимальна.
Динамическое предсказание для Pentium 2 и выше. Данное предсказание применяется для команд перехода, выполняющихся повторно и которые уже имеют информацию. Каждая команда перехода имеет свой адрес (Адрес1), адрес, куда необходимо перейти (Адрес2), битовые флаги (4 флага) и счетчик исполнения команды по модулю 4, наращивающийся при каждом выполнении команды. Когда происходит первое выполнение, команды перехода записываются в свободную строку буфера (все поля нулевые) Адрес1, Адрес2 и один флаг, номер которого соответствует счетчику исполнения команд, устанавливается в 1, если переход был. Далее, если соответствующий флаг равен 1, то имеется наличие перехода, если флаг равен 0, то отсутствие перехода. При варианте, что предсказание о переходе оказалось ошибочным, соответствующий флаг инвертируется. Данный алгоритм сокращает количество ошибок при периодическом характере наличия и отсутствия ошибок. К ошибкам приводят все нарушения периода, в том числе и при вычислении периода.
Рассмотренные выше алгоритмы предсказания все время усовершенствуются для минимизации потерь, но свести на данный момент их к нулю не могут. По этой причине рекомендуется уменьшать число команд перехода в программе, причем чем мощнее, а следовательно, с более длинным конвейером используется процессор, тем более требуется.
Параллелизм на уровне команд. Суперскалярность
Все команды программы делятся на независимые и зависимые команды.
Команды называются зависимыми, если их операнды определяются предшествующими командами. Независимыми командами называют те, которые используют константы, введенные данные или данные, для которых команды уже гарантированно выполнены. Команды, готовые для выполнения – это независимые команды. Их можно выполнять одновременно, если имеются свободные устройства для выполнения этих команд.
Суперскалярные процессоры используются для истинного распараллеливания вычислений. Которые имеют не одно, а несколько однотипных устройств для выполнения операций.
CDC 6600 (1964) [5] был первым компьютером, который имел несколько функциональных блоков. Данный компьютер выпустила фирма Control Data Corporation (CDC) при участии одного из ее основателей Суймура Р.Крэя (Seymour R. Cray)
Компьютер CDC 7600 (1969) включал в себя 8 независимых конвейерных устройств, поэтому в нем соединились преимущества конвейерных и суперскалярных ЭВМ.
ILLIAC IV (1974): матричные процессоры. Проект включал в себя сделать 256 процессорных элементов (ПЭ) и разбить их на 4 квадранта по 64 ПЭ, и предусмотреть возможность перестройки в 2 квадранта по 128 ПЭ или 1 квадрант из 256 ПЭ, ткт 40 нс, производительность 1 Гфлоп. Начались работы в 1967 году, к концу 1971 изготовлена система из 1-го квадранта, в 1974 г. она введена в эксплуатацию, доводка велась до 1975 года. Из-за того, что стоимость проекта была в 4 раза выше, сделан лишь 1 квадрант, такт 80нс, реальная производительность до 50 Мфлоп. Но даже при неудачном завершение проекта, данная разработка использовалась при построении серии других суперкомпьютеров.
CRAI 1 (1976): векторно-конвейерные процессоры, создателем которых является компания Cray Research. Время такта 12.5 нс, 12 ковейерных функциональных устройств, пиковая производительность 160 миллионов операций в секунду, оперативная память до 1 Мслова (слово – 64 разряда), цикл памяти 50нс. Самым главным нововведением является включение векторных команд, работающих с целыми массивами независимых данных, которые позволяют эффективно использовать конвейерные функциональные устройства.
Самые первые суперскалярные процессоры фирмы Intel включали в себя два параллельных блока для выполнения операций, первый блок для выполнения произвольных операций, второй – для выполнения только простых операций. Одновременное использование обоих блоков в этом случае было осуществимо только при «правильной» последовательности команд в программе, что при решении конкретных задач практически невозможно. Именно поэтому по возможности компиляторы упорядочивали команды программы таким образом, чтобы максимально использовать оба блока. Тогда и появился режим оптимизации программ, который зависит от используемого процессора.
На сегодняшний момент процессоры суперскалярные и содержат разное число специализированых блоков, к примеру, блоки для выполнения арифметических операций, операций с плавающей точкой.
Параллелизм на уровне данных. SIMD команды
Очень часто, при решении практических задач приходится для множества данных выполнять одну и ту же операцию. В данном случае можно использовать суперскалярность процессоров, но именно для этого случая современные процессоры имеют специальные команды. В соответствии с их назначением они относятся к группе Single Instruction Multiple Data – одна команда для множества данных (SIMD). Векторно-конвейерными называются компьютеры, которые вместе с конвейером обеспечивают возможность одновременной обработки сразу целого массива. Обычно SIMD команды реализуются с помощью специального конвейера, из-за этого могут выполняться одновременно с основным потоком команд. Представителем данного направления является семейство векторно-конвейерных компьютеров CRAY. Для персональных компьютеров ограничен размер блока 128 битами. Блок может интерпретироваться как массив байтов, 2-байтовых и 4-байтовых слов, а также двух данных длинной 8 байтов, и, наконец, одного блока длинной 16 байтов. Набор команд, а также интерпретация данных (целые, с плавающей точкой) все время расширяется. На сегодня для персональных компьютеров используется несколько классов команд этой группы (MMX – Multi Media Extensions., 3DNow, SSE – Streaming SIMD Extension) разных версий. SIMD команды позволяют распараллелить обработку множества данных без накладных расходов. На сегодняшний момент применение этих команд упрощено в связи с возможностью их использования в С программе.
Пример применения операции сложения для массивов целых чисел, состоящих из четырех чисел:
//Выделение памяти и инициализация массивов
__declspec (align(16))
int x[]={1,2,3,4},
y[]={5,6,7,8},
z=[4];
//Сложение элементов массивов
*(__m128i*)z=_mm_add_epi32(*(__m128i*)x,*(__m128i*)y);
printf(«%d%d%d%dn»,z[0],z[1],z[2],z[3]);
Для сложения чисел фактически выполняется следующие команды:
- загрузка первого массива в 128-битный регистр (т.е. сразу 4-х слагаемых);
- загрузка второго массива в 128-битный регистр (т.е. сразу 4-х слагаемых);
- сложение всех элементов массива (одна команда);
- запись результата в массив.
Параллелизм на уровне задач
Понятие «задача» имеет разный смысл. Если рассматривать процессоров, задачей является программа во время выполнения, а переключение между задачами, это переключение между этими программами, которое инициируется операционной системой и может быть: при истечении кванта времени, если задача ждет выполнения запроса, если требуется выполнения более привилегированных задач. Рассматривая операционные системы, вместо термина задача можно использовать термин процесс, в который фактически вкладывается тот же смысл. Именно поэтому параллелизм на уровне задач предполагает возможность параллельного выполнения отдельных программ. Также наряду с обычными процессами, которым соответствует программа, операционные системы для параллельного выполнения могут использовать отдельных функции процесса (потоки). Рассмотрим параллелизм на уровне процессов и потоков. В этом случае при использовании одного одноядерного процессора может выполняться одновременно только одна функция одного процесса. При режиме разделения времени и высокой скорости выполнения команд может показаться одновременное выполнение, но это не так. Фактически при переключении между потоками старый поток блокируется.
В системах с одни ядром и без Hyper-Threading (HT) технологии в исполнении команд участвует исполнительный блок и внутренний Кеш. Эти элементы вычислительной системы можно назвать вычислительным блоком. Для многопроцессорных систем, вычислительная система имеет несколько вычислительных блоков. Для систем с НТ технологией фактически входит один исполнительный блок, который имеет вид двух логических блоков за счет того, что дублируются некоторые его части (регистры). В многоядерной системе используется несколько вычислительных систем, расположенных физически внутри одной схемы. Многоядерные системы могут использовать как общий внутренний Кеш, так и каждое ядро свой Кеш. Возможна комбинация многоядерности и НТ.
В НТ технологии все ресурсы вычислительного блока (одного) делятся между исполняемыми потоками операционной системой. К примеру, если один поток ждет ввода – вывода данных, то второй поток выполняется с помощью вычислительного блока. Все логические блоки имеют свою копию регистров, поэтому переключения состояния фактически не потребуется, как это в обычных однопроцессорных системах. Общий эффект существенно зависит от потоков, которые работают в паре. При том что все потоки используют одни и те же ресурсы, эффекта фактически не будет, так как устройство одно.
Чтобы достичь истинно параллельного выполнения функций следует иметь несколько процессоров или несколько ядер процессора.
Появление многоядерных процессоров фактически сделало доступными высокопроизводительные вычисления (High Performance Computing – HPC) на домашних компьютерах.
То есть в одной микросхеме располагаются теперь несколько полноценных и равноправных процессорных устройств. Данная технология применяется как в недорогих процессорах (Intel Core 2, AMD Athlon), так и в процессорах для мощных рабочих станций и серверов (AMD Opteron, Intel Xeon). Количество ядер все время растет. На сегодняшний день используются процессоры с 2, 4 и 8 ядрами, в стадии исследования и разработки находятся процессоры с десятками и сотнями ядер, поэтому распараллеливание и масштабирование (т.е. распределение между всеми ядрами процессора) приложений является сложной как теоретической, так и практической задачей, которая на данный момент пока не решена в полной мере.
Память и параллелизм
Как известно, выполнение команд происходит гораздо значительно быстрее, чем доступ к памяти. Чтобы уменьшить потери, связанные с разной скоростью доступа, используется многоуровневая память. Существуют несколько уровней памяти, которые задаются в порядке увеличения времени доступа: регистры, Кеш-память (несколько уровней), оперативная память, внешняя память. Обеспечение параллелизма осуществляется за счет того, что во время выполнения команд и обработки данных используется регистровая и Кеш-память первого уровня, заполняющиеся данными до того, пока они будут использоваться, и до момента, когда они будут нужны, они, как правило, уже находятся в нужной памяти (если конечно, число команд перехода минимизировано!)
Следует рассмотреть классические архитектуры систем с параллельной обработкой данных и команд с точки зрения использования памяти.
Массивно-параллельные компьютеры (MPP)
Данная система включает в себя несколько компьютеров со своей локальной памятью соединяются в одну вычислительную систему с помощью коммутационных устройств [6].
Система состоит из однородных вычислительных узлов, включающих:
- один или несколько центральных процессоров (обычно RISC);
- локальную память (прямой доступ к памяти других узлов невозможен);
- коммуникационный процессор или сетевой адаптер;
- иногда – жесткие диски (как в SP) и/или другие устройства I/O.
Примеры: IBM RS/6000 SP2, Intel PARAGON/ASCI Red, CRAY T3E, Hitachi SR 8000, транспьютерные системы Parsytec.
Достоинством данной архитектуры можно считать возможность ее расширения. Недостаток является медленная передача данных между компьютерами. На сегодняшний момент коммуникационные устройства уменьшают потери, которые связаны с передачей данных, но в любом случае эта операция значительно медленнее, чем при использовании своей памяти.
Симметричные мультипроцессорные системы (SMP – Symmetrical Multi Processor systems)
Одинаковые процессоры подключаются к общей памяти, при этом скорость обращения к общей памяти для всех процессоров одинакова. Процессоры подключаются к памяти либо с помощью общей шины (базовые 2-4-х процессорные SMP-серверы), либо с помощью crossbar-коммутатора (HP 9000). Аппаратно поддерживается когерентность Кешей (гарантия использования актуального значения, данного независимо от того, в каком Кеше изменено его значение). Хоть и проблема передачи данных между памятью решается автоматически, остается ещё одна, это подключение процессоров к общей памяти. Количество процессоров, которые можно подключить, обычно невелико, около 2-4 устройства. Использование 32-х устройств очень дорого, стоимость такой вычислительной системы сотни тысяч долларов.
В связи с использованием общей памяти необходима синхронизация и блокировка в случае попытки доступа к занятому ресурсу с эксклюзивным доступом.
Примеры: HP 9000 V-class, N-class; SMP-сервер и рабочие станции на базе процессоров Intel(IBM, HP,Compaq, Dell, ALR, Unisys, DG, Fujitsu и др.).
Системы с неоднородным доступом к памяти (NUMA – Non-Uniform Memory Access systems)
Состоит система из однородных базовых модулей (плат), которые имеют в своём составе небольшое число процессоров и блок памяти. Объединены модули с помощью высокоскоростного коммутатора. Обеспечивается поддержка единого адресного пространства, аппаратно поддерживается доступ к удаленной памяти, т.е. к памяти других модулей. Доступ к локальной памяти в несколько раз быстрее, чем к удаленной, а скорость доступа к удаленной памяти будет больше, чем дальше будет удалена память от процессора.
В случае если аппаратно поддерживается когерентность Кешей во всей системе (обычно это так), говорят об архитектуре cc-NUMA (cache-coherent NUMA).
В случае попытки доступа к занятому ресурсу с эксклюзивным доступом, при использование общей памяти, необходима синхронизация и блокировка. Также при разработке алгоритма желательно обеспечить доступ к «своей» памяти везде, где есть возможно.
Примеры: Примеры: HP 9000 V-class в SCA-конфигурациях, SGI Origin2000, Sun HPC 10000, IBM/Sequent NUMA-Q 2000, SNI RM600.
Параллельные векторные системы (PVP)
Главным признаком PVP-систем можно считать наличие специальных векторно-конвейерных процессоров, которые имеют команды однотипной обработки векторов независимых данных, которые эффективно выполняются на конвейерных функциональных устройствах.
В основном, несколько таких процессоров (1-16) работают одновременно над общей памятью (аналогично SMP) в многопроцессорных конфигурациях. Объединение несколько узлов происходит с помощью коммутатора (аналогично MPP).
Примеры: NEC SX-4/SX-5, линия векторно-конвейерных компьютеров CRAY: от CRAY-1, CRAY J90/T90, CRAY SV1, CRAY X1, серия Fujitsu VPP.
Кластерные системы
В качестве дешевого варианта массивно-параллельного компьютера используется набор рабочих станций (или даже ПК) общего назначения. Что узлы имели связь используется одна из стандартных сетевых технологий (Fast/Gigabit Ethernet, Myrinet) на базе шинной архитектуры или коммутатора.
Когда происходит объединении в кластер компьютеров разной мощности или разной архитектуры говорят о гетерогенных (неоднородных) кластерах.
Узлы кластера можно одновременно использовать в качестве пользовательских рабочих станций. Если это не нужно, узлы можно существенно облегчить и/или установить в стойку.
Актуальной проблемой является доступа к «чужой» памяти, из-за этого часто такая система используется для одновременного решения нескольких независимых задач.
Примеры: NT-кластер в NCSA, Beowulf-кластеры.
Многоядерные процессоры
С точки зрения программиста, многоядерным процессором является несколько процессоров, имеющие раздельный Кеш 0 уровня (Кеш 2-го и более высоких уровней чаще общий, но может быть и раздельным) и общую оперативную память. По этой причине желательно при разработке алгоритмов обеспечивать максимальную независимость данных, которые используются в разных ядрах. Синхронизация и блокировка являются на данный момент актуальной проблемой.
Используемая литература:
- Flynn M. Very high-speed computing system // Proc. IEEE. 1966. N 54. P.1901-1909.
- Hwang K., Briggs F.A. Computer Architecture and Parallel Processing. 1984. P.32-40.
- http://ru.wikipedia.org/wiki/Параллельные_вычисления; http://ru.wikipedia.org/wiki/Нейрокомпьютер ;
- Гергелъ В.П., Стронгин Р.Г Основы параллельных вычислений для многопроцессорных вычислительных систем. Нижний Новгород: -Издательство Нижегородского госуниверситета, 2003
- Воеводин В.В., Воеводин Вл.в. Параллельные вычисления. СПб: БХВ – Петербург, 2004 – 608с.
Аннотация: В данной лекции дается определение понятия архитектуры высокопроизводительной системы, приводится классификация архитектур, основанная на рассмотрении числа потоков инструкций и потоков данных.
Чтобы дать более полное представление о многопроцессорных вычислительных системах, помимо высокой производительности необходимо назвать и другие отличительные особенности. Прежде всего, это необычные архитектурные решения, направленные на повышение производительности (работа с векторными операциями, организация быстрого обмена сообщениями между процессорами или организация глобальной памяти в многопроцессорных системах и др.).
Понятие архитектуры высокопроизводительной системы является достаточно широким, поскольку под архитектурой можно понимать и способ параллельной обработки данных, используемый в системе, и организацию памяти, и топологию связи между процессорами, и способ исполнения системой арифметических операций. Попытки систематизировать все множество архитектур впервые были предприняты в конце 60-х годов и продолжаются по сей день.
В 1966 г. М.Флинном (Flynn) был предложен чрезвычайно удобный подход к классификации архитектур вычислительных систем. В его основу было положено понятие потока, под которым понимается последовательность элементов, команд или данных, обрабатываемая процессором. Соответствующая система классификации основана на рассмотрении числа потоков инструкций и потоков данных и описывает четыре архитектурных класса:
SISD = Single Instruction Single Data MISD = Multiple Instruction Single Data SIMD = Single Instruction Multiple Data MIMD = Multiple Instruction Multiple Data
SISD (single instruction stream / single data stream) – одиночный поток команд и одиночный поток данных. К этому классу относятся последовательные компьютерные системы, которые имеют один центральный процессор, способный обрабатывать только один поток последовательно исполняемых инструкций. В настоящее время практически все высокопроизводительные системы имеют более одного центрального процессора, однако каждый из них выполняет несвязанные потоки инструкций, что делает такие системы комплексами SISD-систем, действующих на разных пространствах данных. Для увеличения скорости обработки команд и скорости выполнения арифметических операций может применяться конвейерная обработка. В случае векторных систем векторный поток данных следует рассматривать как поток из одиночных неделимых векторов. Примерами компьютеров с архитектурой SISD могут служить большинство рабочих станций Compaq, Hewlett-Packard и Sun Microsystems.
MISD (multiple instruction stream / single data stream) – множественный поток команд и одиночный поток данных. Теоретически в этом типе машин множество инструкций должно выполняться над единственным потоком данных. До сих пор ни одной реальной машины, попадающей в данный класс, создано не было. В качестве аналога работы такой системы, по-видимому, можно рассматривать работу банка. С любого терминала можно подать команду и что-то сделать с имеющимся банком данных. Поскольку база данных одна, а команд много, мы имеем дело с множественным потоком команд и одиночным потоком данных.
SIMD (single instruction stream / multiple data stream) – одиночный поток команд и множественный поток данных. Эти системы обычно имеют большое количество процессоров, от 1024 до 16384, которые могут выполнять одну и ту же инструкцию относительно разных данных в жесткой конфигурации. Единственная инструкция параллельно выполняется над многими элементами данных. Примерами SIMD-машин являются системы CPP DAP, Gamma II и Quadrics Apemille. Другим подклассом SIMD-систем являются векторные компьютеры. Векторные компьютеры манипулируют массивами сходных данных подобно тому, как скалярные машины обрабатывают отдельные элементы таких массивов. Это делается за счет использования специально сконструированных векторных центральных процессоров. Когда данные обрабатываются посредством векторных модулей, результаты могут быть выданы на один, два или три такта частотогенератора (такт частотогенератора является основным временным параметром системы). При работе в векторном режиме векторные процессоры обрабатывают данные практически параллельно, что делает их в несколько раз более быстрыми, чем при работе в скалярном режиме. Примерами систем подобного типа являются, например, компьютеры Hitachi S3600.
MIMD (multiple instruction stream / multiple data stream) – множественный поток команд и множественный поток данных. Эти машины параллельно выполняют несколько потоков инструкций над различными потоками данных. В отличие от упомянутых выше многопроцессорных SISD-машин, команды и данные связаны, потому что они представляют различные части одной и той же задачи. Например, MIMD-системы могут параллельно выполнять множество подзадач с целью сокращения времени выполнения основной задачи. Большое разнообразие попадающих в данный класс систем делает классификацию Флинна не полностью адекватной. Действительно, и четырехпроцессорный SX-5 компании NEC, и тысячепроцессорный Cray T3E попадают в этот класс. Это заставляет использовать другой подход к классификации, иначе описывающий классы компьютерных систем. Основная идея такого подхода может состоять, например, в следующем. Будем считать, что множественный поток команд может быть обработан двумя способами: либо одним конвейерным устройством обработки, работающем в режиме разделения времени для отдельных потоков, либо каждый поток обрабатывается своим собственным устройством. Первая возможность используется в MIMD-компьютерах, которые обычно называют конвейерными или векторными, вторая – в параллельных компьютерах. В основе векторных компьютеров лежит концепция конвейеризации, т.е. явного сегментирования арифметического устройства на отдельные части, каждая из которых выполняет свою подзадачу для пары операндов. В основе параллельного компьютера лежит идея использования для решения одной задачи нескольких процессоров, работающих сообща, причем процессоры могут быть как скалярными, так и векторными.
Классификация архитектур вычислительных систем нужна для того, чтобы понять особенности работы той или иной архитектуры, но она не является достаточно детальной, чтобы на нее можно было опираться при создании МВС, поэтому следует вводить более детальную классификацию, которая связана с различными архитектурами ЭВМ и с используемым оборудованием.