![]()
ФС-СРМ
Получатель
Введение
FS-SRM на базе протокола ANT — это новый приемник с двумя внешними антеннами и двунаправленной передачей. Он выводит сигнал PWM или PPM/i-BUS/S.BUS и имеет компактный дизайн. Конструкция приемника проста в установке и подходит для мультикоптеров.
Обзор

- GND
- VCC
- i-BUS-интерфейс
- СЕНС интерфейс
- PPM/ШИМ
- Антенна
- Кнопка ПРИВЯЗКИ
- LED
Характеристики
- Название продукта: ФС-СРМ
- Адаптивные передатчики: передатчик с протоколом ANT, например FS-ST8.
- Адаптивные модели: мультикоптеры
- Количество каналов: 1
- РФ: 2.4 ГГц ISM
- Максимальная мощность: < 20 дБм (э.и.и.м.) (ЕС)
- Протокол 2.4G: муравей
- Разрешение: 1024
- Антенна: две антенны
- Расстояние:> 380 м
- Входная мощность: 3.5 В ~ 9 В/постоянный ток
- Вывод данных: PWM/PPM/i-BUS/S.BUS
- Онлайн-обновление: Да
- Рабочий ток: около 70 мА/5 В
- Диапазон температур: -10℃ ~ +60℃
- Предел влажности: 20% ~ 95%
- Размеры: 19 * * 12.1mm 3
- Вес: 1.1 г Сертификаты: CE, FCC ID: 2A2UNSRM00
переплет
Приемник поддерживает двустороннюю и одностороннюю привязку. Передатчик отобразит информацию, возвращенную приемником после завершения двусторонней привязки.
Выполните следующие действия, чтобы выполнить двустороннюю привязку:
- Выберите [2 WAY] для радиочастотного стандарта передатчика, затем переведите передатчик в режим привязки.
- Ресивер поддерживает два способа входа в режим привязки: привязка кнопки BIND и привязка кнопки BIND после включения питания.
• Привязка кнопки BIND: нажмите и удерживайте кнопку BIND приемника при включении приемника, светодиод приемника должен мигать, показывая, что приемник находится в режиме привязки. Затем отпустите кнопку BIND.
• Залипание кнопки BIND после включения: Приемник не был подключен к передатчику при включении питания. Нажмите и удерживайте кнопку BIND в течение 3 секунд, светодиод приемника должен мигать, показывая, что приемник находится в режиме привязки.
Затем отпустите кнопку BIND. - Когда светодиод приемника горит постоянно, процесс привязки должен быть завершен. Передатчик автоматически выходит из режима привязки.
- Убедитесь, что функции передатчика и приемника работают правильно, повторите шаги с 1 по 3 (процесс привязки), если возникнут какие-либо проблемы.
Выполните следующие действия, чтобы выполнить одностороннюю привязку:
- Выберите [1 WAY] для радиочастотного стандарта передатчика, затем переведите передатчик в режим привязки.
- Переведите приемник в режим привязки (обратитесь к описанию выше для входа в режим привязки).
- Когда светодиод приемника медленно мигает, процесс привязки должен быть завершен. Вам нужно вручную поставить передатчик, чтобы выйти из режима привязки. Затем светодиод приемника загорится, показывая, что привязка завершена.
- Убедитесь, что функции передатчика и приемника работают правильно, повторите шаги с 1 по 3 (процесс привязки), если возникнут какие-либо проблемы.
Обновление прошивки
Прошивка данного ресивера обновляется через FlyskyAssistant (Поддерживается только версия 3.0 и выше. Прошивка от
FlyskyAssistant доступен на официальном сайте Flysky webсайт).
Этот ресивер можно обновить следующими двумя способами:
- После привязки между передатчиком и приемником (светодиод приемника горит постоянно) подключите передатчик к компьютеру, затем откройте FlyskyAssistant на компьютере для обновления прошивки.
- Подключите передатчик к компьютеру. Затем переведите приемник в режим принудительного обновления, используя следующие два способа (светодиод приемника работает в режиме трехкратного мигания). После этого откройте FlyskyAssistant на компьютере, чтобы обновить прошивку.
• Включите приемник, нажав и удерживая кнопку BIND более десяти секунд, пока не загорится светодиод приемника.
работает в режиме три мигания один раз, затем отпускает кнопку BIND.
• Сначала включите приемник, затем нажмите и удерживайте кнопку BIND более десяти секунд, когда светодиод на
приемник работает в режиме три вспышки один раз, затем отпускает кнопку BIND.
Отказоустойчивость
Функция отказоустойчивости используется для вывода значения канала в соответствии со значением защиты от выхода из-под контроля, установленным пользователем после
приемник теряет сигнал и выходит из-под контроля, чтобы защитить модель и персонал.
Также можно установить отказоустойчивость для каждого канала соответственно. Этот ресивер поддерживает два режима отказоустойчивости: [ON] и [OFF].
[ВЫКЛ] Нет выхода для интерфейса ШИМ.
[ON] Выводит значения отказоустойчивости, установленные для каждого канала.
Заметки:
- Для типов сигналов шины, таких как PPM/i-BUS/S.BUS, один или несколько из этих каналов не могут находиться в режиме [Нет выхода]. Фактический сигнал удерживается на последнем выходном значении, когда канал установлен в режим [Нет выхода].
- Поскольку информация сигнала S.BUS содержит биты флага отказоустойчивости, настройки отказоустойчивости каждого канала передаются последующим устройствам с помощью битов флага отказоустойчивости. Если подключенные устройства поддерживают битовый анализ флажка отказоустойчивости, значения отказоустойчивости, установленные для каждого канала, выводятся после выхода из-под контроля.
- Для сигнала PPM/i-BUS без битов флажка отказоустойчивости поддерживается установка сигнала в режим [Нет выхода] в случае выхода из-под контроля. После установки режима [Нет выхода], независимо от настройки отказоустойчивости каждого канала, каждый канал будет находиться в режиме [Нет выхода] после выхода из-под контроля.
![]()
- GND
- VCC
- i-BUS-интерфейс
- СЕНС интерфейс
- PPM/ШИМ
- Антенна
- Кнопка ПРИВЯЗКИ
- LED
Характеристики
- Название продукта: ФС-СРМ
- Адаптивные передатчики: передатчик с протоколом ANT, например FS-ST8.
- Адаптивные модели: мультикоптеры
- Количество каналов: 1
- РФ: 2.4 ГГц ISM
- Максимальная мощность: < 20 дБм (э.и.и.м.) (ЕС)
- Протокол 2.4G: муравей
- Разрешение: 1024
- Антенна: две антенны
- Расстояние:> 380 м
- Входная мощность: 3.5 В ~ 9 В/постоянный ток
- Вывод данных: PWM/PPM/i-BUS/S.BUS
- Онлайн-обновление: Да
- Рабочий ток: около 70 мА/5 В
- Диапазон температур: -10℃ ~ +60℃
- Предел влажности: 20% ~ 95%
- Размеры: 19 * * 12.1mm 3
- Вес: 1.1 г Сертификаты: CE, FCC ID: 2A2UNSRM00
переплет
Приемник поддерживает двустороннюю и одностороннюю привязку. Передатчик отобразит информацию, возвращенную приемником после завершения двусторонней привязки.
Выполните следующие действия, чтобы выполнить двустороннюю привязку:
- Выберите [2 WAY] для радиочастотного стандарта передатчика, затем переведите передатчик в режим привязки.
- Ресивер поддерживает два способа входа в режим привязки: привязка кнопки BIND и привязка кнопки BIND после включения питания.
• Привязка кнопки BIND: нажмите и удерживайте кнопку BIND приемника при включении приемника, светодиод приемника должен мигать, показывая, что приемник находится в режиме привязки. Затем отпустите кнопку BIND.
• Залипание кнопки BIND после включения: Приемник не был подключен к передатчику при включении питания. Нажмите и удерживайте кнопку BIND в течение 3 секунд, светодиод приемника должен мигать, показывая, что приемник находится в режиме привязки.
Затем отпустите кнопку BIND. - Когда светодиод приемника горит постоянно, процесс привязки должен быть завершен. Передатчик автоматически выходит из режима привязки.
- Убедитесь, что функции передатчика и приемника работают правильно, повторите шаги с 1 по 3 (процесс привязки), если возникнут какие-либо проблемы.
Выполните следующие действия, чтобы выполнить одностороннюю привязку:
- Выберите [1 WAY] для радиочастотного стандарта передатчика, затем переведите передатчик в режим привязки.
- Переведите приемник в режим привязки (обратитесь к описанию выше для входа в режим привязки).
- Когда светодиод приемника медленно мигает, процесс привязки должен быть завершен. Вам нужно вручную поставить передатчик, чтобы выйти из режима привязки. Затем светодиод приемника загорится, показывая, что привязка завершена.
- Убедитесь, что функции передатчика и приемника работают правильно, повторите шаги с 1 по 3 (процесс привязки), если возникнут какие-либо проблемы.
Обновление прошивки
Прошивка данного ресивера обновляется через FlyskyAssistant (Поддерживается только версия 3.0 и выше. Прошивка от
FlyskyAssistant доступен на официальном сайте Flysky webсайт).
Этот ресивер можно обновить следующими двумя способами:
- После привязки между передатчиком и приемником (светодиод приемника горит постоянно) подключите передатчик к компьютеру, затем откройте FlyskyAssistant на компьютере для обновления прошивки.
- Подключите передатчик к компьютеру. Затем переведите приемник в режим принудительного обновления, используя следующие два способа (светодиод приемника работает в режиме трехкратного мигания). После этого откройте FlyskyAssistant на компьютере, чтобы обновить прошивку.
• Включите приемник, нажав и удерживая кнопку BIND более десяти секунд, пока не загорится светодиод приемника.
работает в режиме три мигания один раз, затем отпускает кнопку BIND.
• Сначала включите приемник, затем нажмите и удерживайте кнопку BIND более десяти секунд, когда светодиод на
приемник работает в режиме три вспышки один раз, затем отпускает кнопку BIND.
Отказоустойчивость
Функция отказоустойчивости используется для вывода значения канала в соответствии со значением защиты от выхода из-под контроля, установленным пользователем после
приемник теряет сигнал и выходит из-под контроля, чтобы защитить модель и персонал.
Также можно установить отказоустойчивость для каждого канала соответственно. Этот ресивер поддерживает два режима отказоустойчивости: [ON] и [OFF].
[ВЫКЛ] Нет выхода для интерфейса ШИМ.
[ON] Выводит значения отказоустойчивости, установленные для каждого канала.
Заметки:
- Для типов сигналов шины, таких как PPM/i-BUS/S.BUS, один или несколько из этих каналов не могут находиться в режиме [Нет выхода]. Фактический сигнал удерживается на последнем выходном значении, когда канал установлен в режим [Нет выхода].
- Поскольку информация сигнала S.BUS содержит биты флага отказоустойчивости, настройки отказоустойчивости каждого канала передаются последующим устройствам с помощью битов флага отказоустойчивости. Если подключенные устройства поддерживают битовый анализ флажка отказоустойчивости, значения отказоустойчивости, установленные для каждого канала, выводятся после выхода из-под контроля.
- Для сигнала PPM/i-BUS без битов флажка отказоустойчивости поддерживается установка сигнала в режим [Нет выхода] в случае выхода из-под контроля. После установки режима [Нет выхода], независимо от настройки отказоустойчивости каждого канала, каждый канал будет находиться в режиме [Нет выхода] после выхода из-под контроля.
![]() Внимание:
Внимание:
- Убедитесь, что продукт установлен и откалиброван правильно, несоблюдение этого может привести к серьезной травме.
- Перед использованием внимательно ознакомьтесь с инструкциями по каждому устройству питания и раме автомобиля, чтобы убедиться, что соответствие мощности является разумным. Избегайте повреждения системы питания из-за неправильного согласования.
- Не допускайте, чтобы внешняя температура системы превышала 90 ℃ / 194 ℉, поскольку высокая температура может повредить систему питания.
- Убедитесь, что приемник установлен вдали от двигателей или любых устройств, излучающих чрезмерные электрические помехи.
- Держите антенну приемника на расстоянии не менее 1 см от проводящих материалов, таких как углерод или металл.
- Не включайте приемник во время процесса настройки, чтобы не потерять управление.
Сертификаты
Заявление о соответствии FCC
Это устройство соответствует требованиям части 15 правил FCC. Эксплуатация возможна при соблюдении следующих двух условий: (1) это устройство не может создавать вредных помех, и (2) это устройство должно принимать любые принимаемые помехи, включая помехи, которые могут вызвать нежелательную работу.
Предупреждение: изменения или модификации, явно не одобренные стороной, ответственной за соответствие, могут лишить пользователя права на эксплуатацию оборудования.
Это оборудование было протестировано и признано соответствующим ограничениям для цифровых устройств класса B в соответствии с частью 15 правил FCC. Эти ограничения разработаны для обеспечения разумной защиты от вредных помех при установке в жилых помещениях. Это оборудование генерирует, использует и может излучать радиочастотную энергию и, если оно установлено и используется не в соответствии с инструкциями, может создавать вредные помехи для радиосвязи. Однако нет гарантии, что помехи не возникнут при конкретной установке.
Если это оборудование действительно создает недопустимые помехи для приема радио или телевидения, что можно определить путем включения и выключения оборудования, пользователю рекомендуется попытаться устранить помехи одним или несколькими из следующих способов:
Изменить ориентацию или местоположение приемной антенны.
Увеличьте расстояние между оборудованием и приемником.
Подключить оборудование к розетке в цепи, отличной от той, к которой подключен приемник.
Обратитесь за помощью к дилеру или опытному радио / телевизионному технику.
Декларация DoC ЕС
Настоящим [Flysky Technology co., ltd] заявляет, что радиооборудование [FS-SRM] соответствует требованиям RED 2014/53/EU.
Полный текст DoC ЕС доступен по следующему интернет-адресу: www.flysky-cn.com.
Соответствие воздействию радиочастотного излучения
Это оборудование соответствует ограничениям FCC на радиационное воздействие, установленным для неконтролируемой среды. Это оборудование следует устанавливать и эксплуатировать на расстоянии не менее 20 см между радиатором и вашим телом. Этот передатчик не должен располагаться рядом или работать вместе с какой-либо другой антенной или передатчиком.
Экологичная утилизация
Старые электроприборы нельзя утилизировать вместе с остаточными отходами, а следует утилизировать отдельно. Утилизация в коммунальном пункте сбора через частных лиц осуществляется бесплатно. Владелец старых бытовых приборов несет ответственность за сдачу бытовых приборов в эти или аналогичные пункты сбора. Этими небольшими личными усилиями вы вносите свой вклад в переработку ценного сырья и обработку токсичных веществ. Идентификатор FCC: 2A2UNSRM00
Рисунки и иллюстрации в данном руководстве приведены только для справки и могут отличаться от фактического внешнего вида продукта. Дизайн и технические характеристики продукта могут быть изменены без предварительного уведомления.

Производитель: FLYSKY Technology Co., Ltd.
Адрес: 16F, Huafeng Building, 6006 Shennan Road, Futian District, Шэньчжэнь.
http://www.flysky-cn.com
Авторские права © 2021 Flysky Technology co., Ltd.
Документы / Ресурсы
Рекомендации
В этой статья я расскажу как настроить и установить FlySky FS-iA6B и FS-iA10B в Betaflight
Содержание
- Установка и настройка FlySky FS-iA6B и FS-iA10B
- Связывание FS-iA6B и FS-iA6B с пультом
- Подключение приемника
- Настройка каналов
- Настройка iBus в Betaflight
- Настройка FailSafe
- Если не получилось настроить по статье выше
Установка и настройка FlySky FS-iA6B и FS-iA10B
Betaflight поддерживает PWM-приемники, но я настоятельно рекомендую купить приемник, который работает по протоколу iBUS.
iBUS — это цифровой протокол, такой же как SBUS, но у него меньше задержки и более высокая точность сигнала управления, а также его немного легче установить, за счет минимального количества проводов.
В настоящее время на рынке есть два приемника FlySky, которые поддерживают iBUS:
FS-iA6B и FS-iA10 — этот приемник (ресивер) для полетов на гоночных квадрокоптерах. Они компактные, их легко можно установить в мелкий дрон, у них крепкий корпус, но антенные не съемные.
Отличие FS-iA6B от FS-iA10 лишь в том, что в первом 6 каналов связи, а во втором — 10 каналов. Для гоночного квадрокоптера будет достаточно 6 каналов (4 управление, 1 канал на переключался режимов полета и 1 канал на пищалку для поиска дрона в траве). 10 канальные приемники используют чаще на съемочных самосборных квадрокоптерах, либо, если на гоночный вешают ненужные для гоночного датчики, типа GPS и т.д. и чтобы их включать, нужны дополнительные каналы.
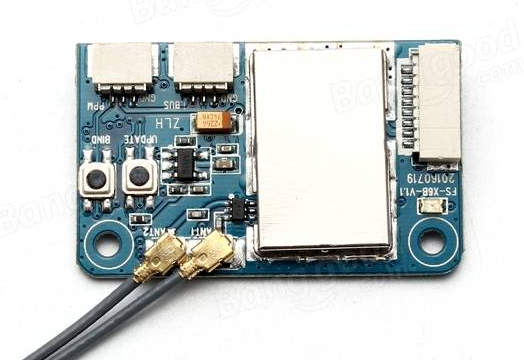
A8B — этот приемник имеет правый форм-фактор, и зато съемная. Эти приемники без корпуса и требуют защиты.
Приемник FS-iA6 и FS-iA10, который поставляется со многими аппаратурами FlySky i6 и i10, в настоящее время не поддерживает iBUS. Это исправят в ближайшем будущем с релизом новой версии Betaflight 3.1. Это потребует сделать небольшую модификацию приемника, но это стоит сэкономленных денег. Приемник подключается к порту UART на полетном контроллере, и кстати, его можно установить в любой UART, так как он не требует последовательности, в отличии от SBUS. Однако, вы не должны подключать ваш приемник IBUS к выходу с надписью «SBUS». В этой статье я буду подключать приемник к порту UART3.
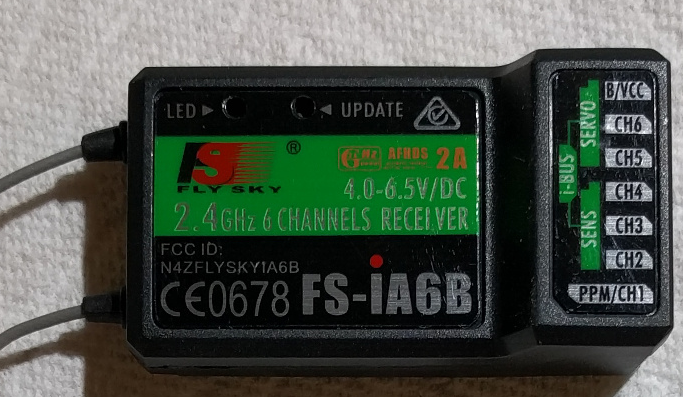

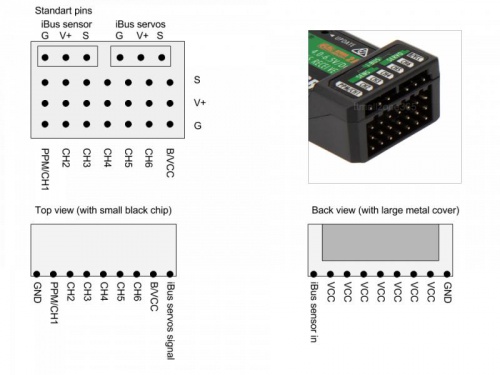
FS-iA6B и FS-iA10B имеет два порта iBUS, расположенных на верхних шести контактах приемник. Слот «SENS» предназначен для подключения телеметрии в FS-iA6B и FS-iA6B. Телеметрия iBUS еще не поддерживается в Betaflight, но она есть. Слот «SERVO» — это выход iBUS от приемника, к которому подключается сервопровод, выходящий из полетного контроллера.
Переплет и настройка переключателей режимов Прежде чем настраивать свое радио, вам нужно привязать к нему приемник FlySky. Для этого вам нужно включить питание вашего квадроцикла с подключенным штекером, вставленным в приемник. Сначала удалите реквизиты и подумайте о том, чтобы использовать устройство дымоудаления, если это первый раз, когда вы включаете квадроцикл.
Связывание FS-iA6B и FS-iA6B с пультом
На приемниках с штыревыми разъемами, имеющими порт «bind», вам нужно будет использовать подключаемый штекер, поставляемый с ресивером, чтобы TX и RX могли разговаривать друг с другом. При вставленном штепсельной вилке приемник загрузится быстро мигающим светом. Это означает, что он находится в режиме привязки. Чтобы связать свой FS-i6 и FS-iA10B с ним, включите TX, удерживая кнопку привязки. Процесс привязки произойдет немедленно, и RX (приемник) будет медленно мигать, показывая, что привязка успешно выполнена. В этот момент вы должны удалить свою привязку.
Подключение приемника
Прежде чем настраивать квадрокоптер, нужно привязать к нему приемник FlySky. Для этого подключите разъем приемника к полетному контроллеру и подключите аккумулятор к дрону. Не забудьте снять пропеллеры перед этими действиями! Если вы правильно подключили приемник к контроллеру, то на нем замигает светодиод. Теперь включите пульт. Пульт начнет пищать, сообщая о том, что сигнала нет, но через пару секунд перестанет, значит он поймал сигнал с приемника.
Также, если вы не знаете, как подключать провода от полетного контроллера к приемнику, посмотрите это видео:
Настройка каналов
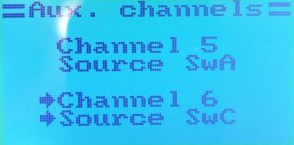
Единственная настройка, которую нужно сделать, это привязать переключатели режимов на пульте к каналам 5 и 6. Я рекомендую сделать 1 канал на постановку и снятие с охраны дрона, а второй на переключение режимов полета (стабилизация или акро). Как это сделать, читаем ниже:
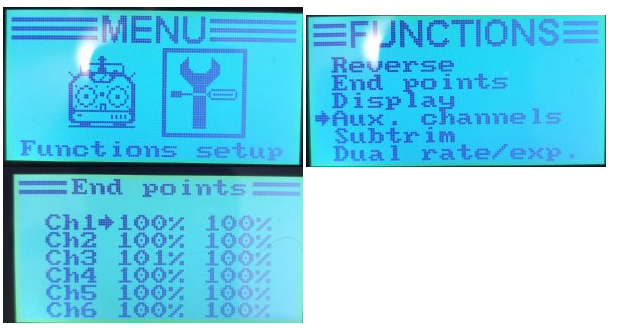
- Нажмите и удерживайте кнопку «ОК» на пульте.
- Выберите «Functions setup» и нажмите ок:

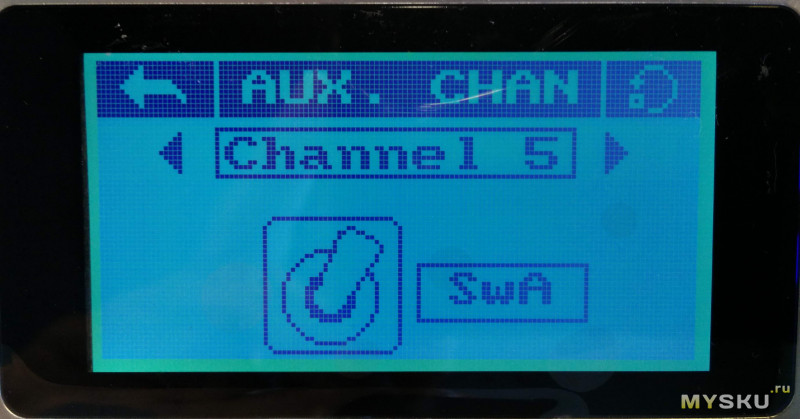
- Выбираем «Aux. channels»:
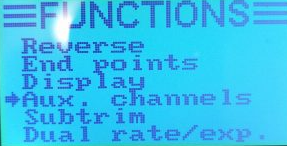
- Далее, нужно привязать определенные переключатели к каналам. 5 обычно используется для снятия/постановки с/на охрану дрона (ну или включение пищалки для поиска упавшего дрона, там уже с приходом опыта будете ставить как вам удобно и нужно), а 6 обычно делают для переключения режимов полета.
- Чтобы сохранить настройки, нажмите и удерживайте «Cancel».
Настройка iBus в Betaflight
В настройке нет ничего сложного. Для начала, всегда снимайте пропеллеры, зачем подкючаем по USB дрон к компьютеру, запускаем Betaflight и нажимаем Connect.
- Переходим во вкладку «Ports», там включаем Serial RX, на том порту (порты слева UART1,2,3), к которому вы подключили. Как это понять? Посмотрите схему вашего полетного контроллера, там все порты будут с подписями.
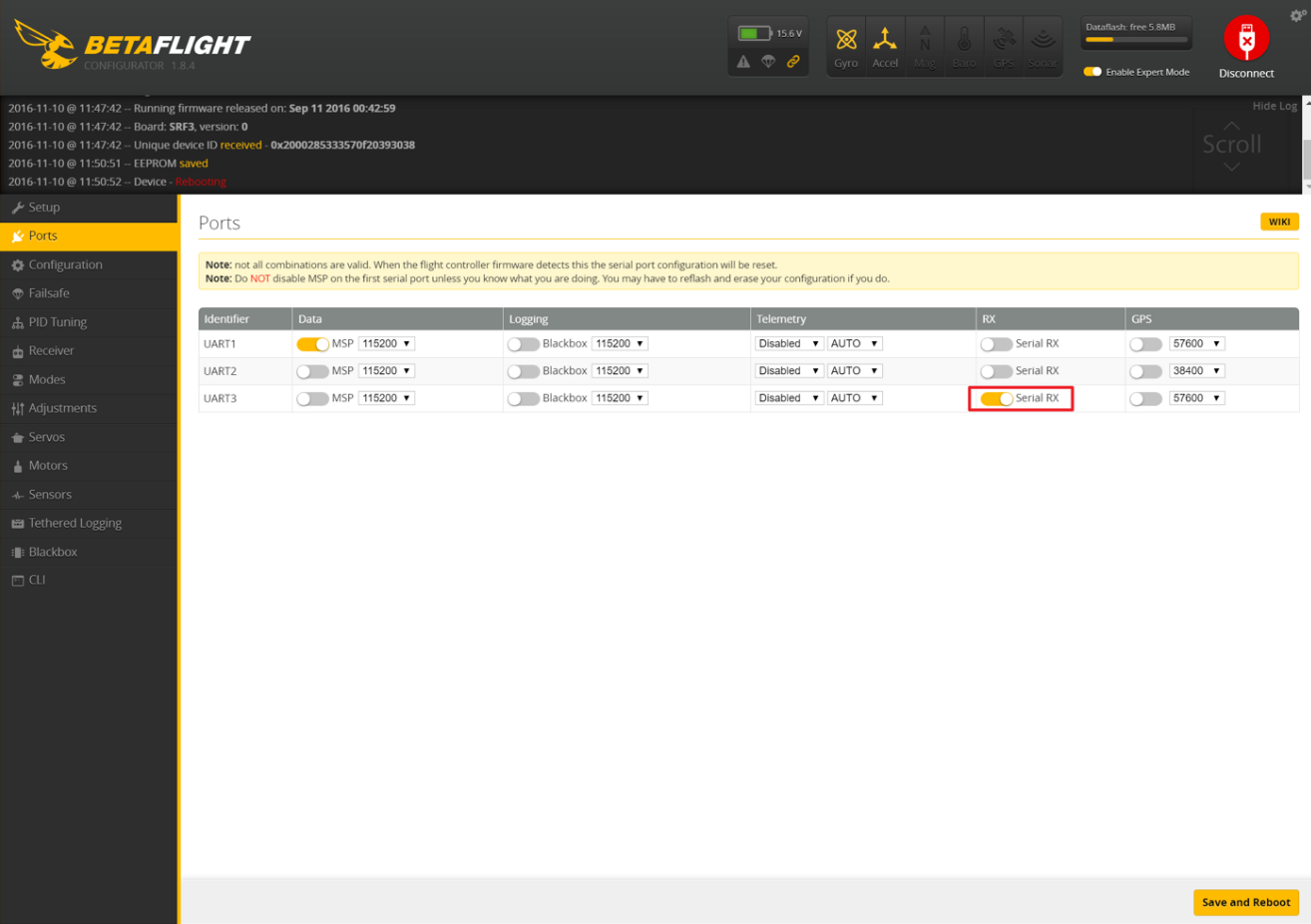 Нажимаем Save and Reboot
Нажимаем Save and Reboot - Переходим во вкладку «Configuration». Выбираем «RX_SERIAL» в блоке «Receiver Mode», а также выбираем «IBUS» в блоке «Serial Receiver Provider».
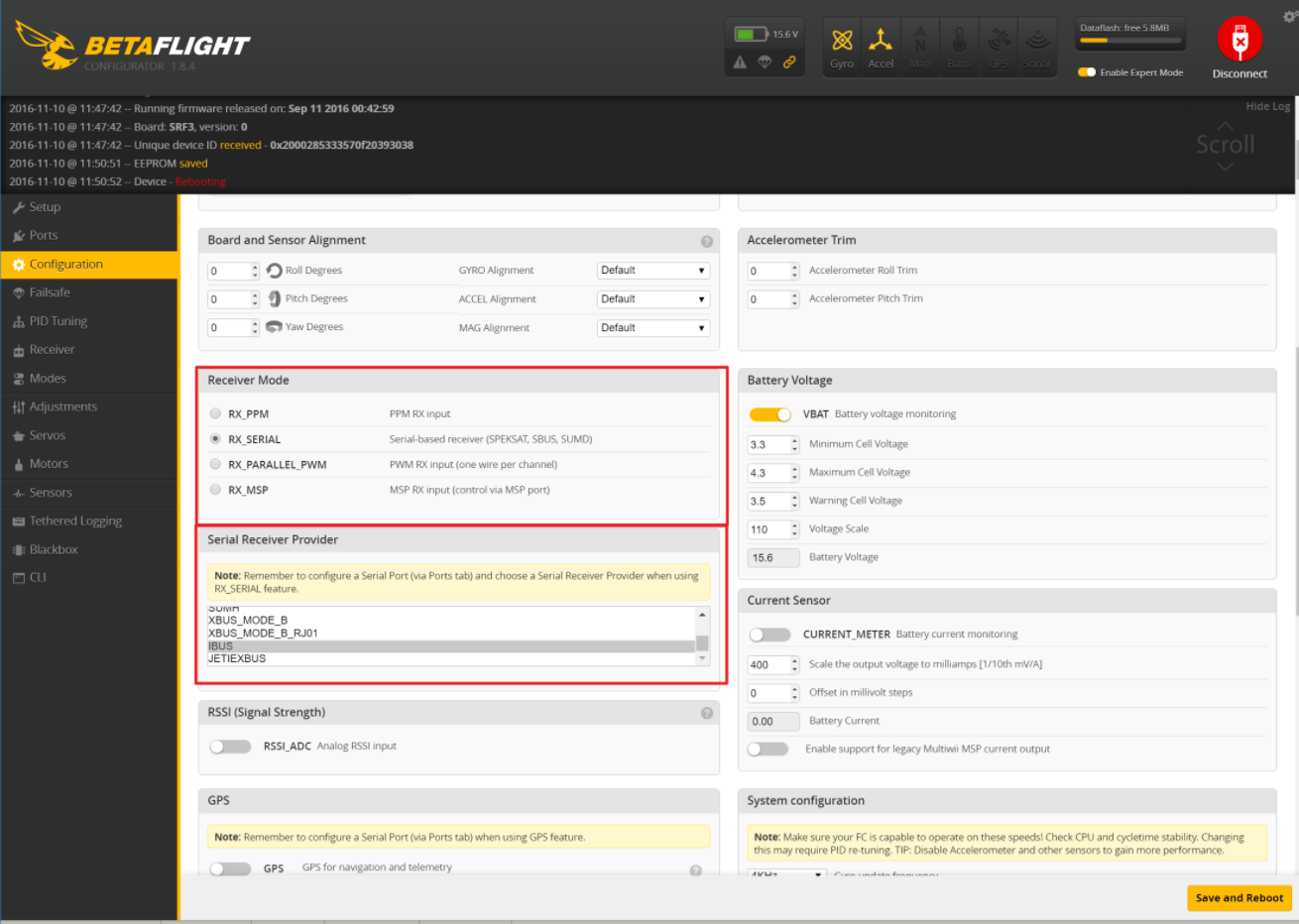 Снова нажимаем Save and Reboot.
Снова нажимаем Save and Reboot. - Далее переходим во вкладку «Receiver». В блоке «Channel map» выбираем «Futaba» или «AETR1234». Это стандартные протоколы и их менять обычно не нужно.
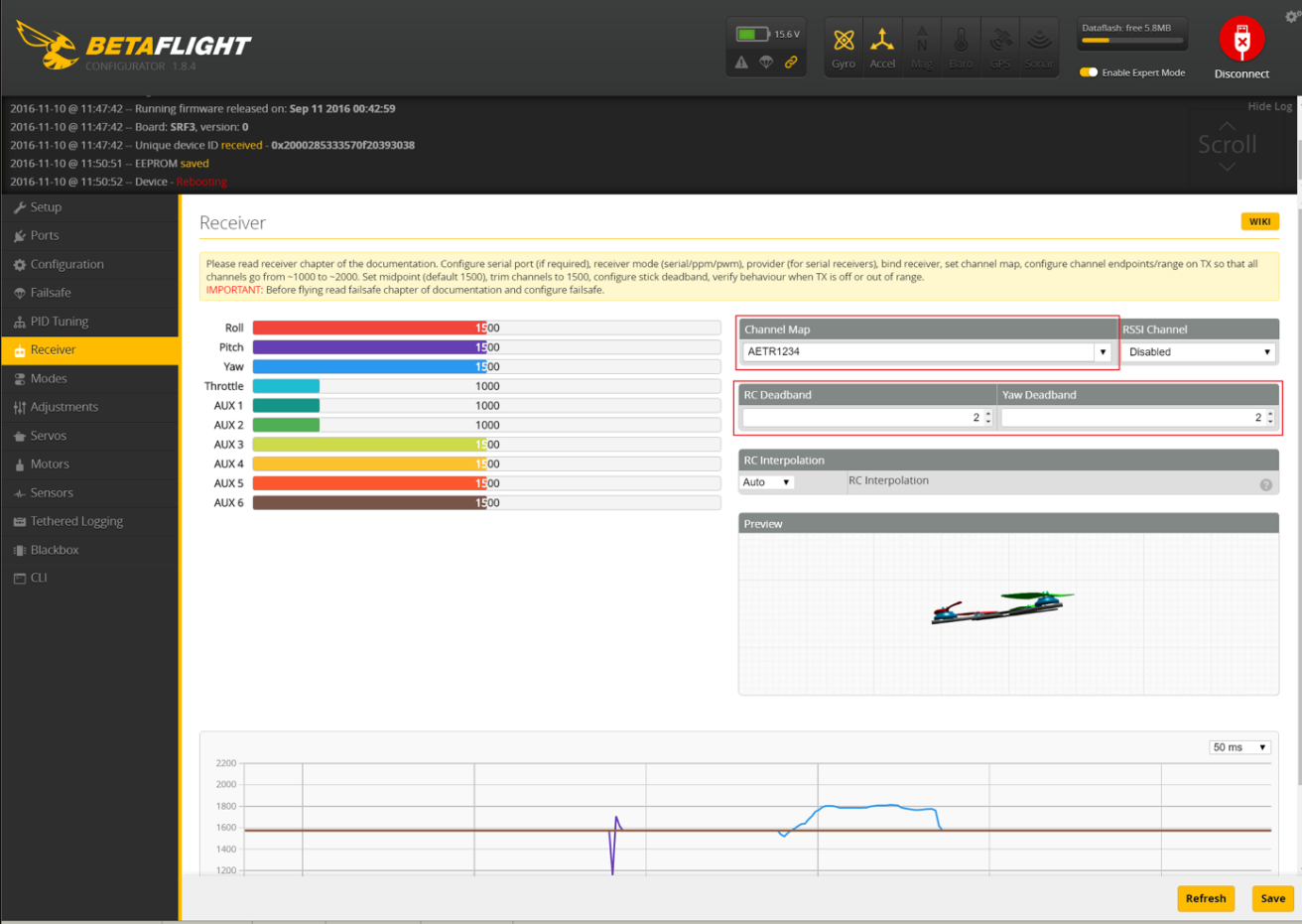 Жмем Save.
Жмем Save. - Теперь убедитесь, что все переключатели работают (а также переключатели снятия с охраны и переключатели режимов полета), они должны быть на отметке 1500, кроме газа, газ должен быть на 1000, когда стик находится в нижнем положении. Подробнее, как сделать так, чтобы все значения были на отметке 1500, можете почитать в этой стать: Betaflight configurator, настройка на русском.
Настройка FailSafe
Важная функция — настройка того, что будет делать дрон, если произойдет потеря сигнала с аппаратуры управления.
Посмотрите на значение Receiver, какое там будет значение:
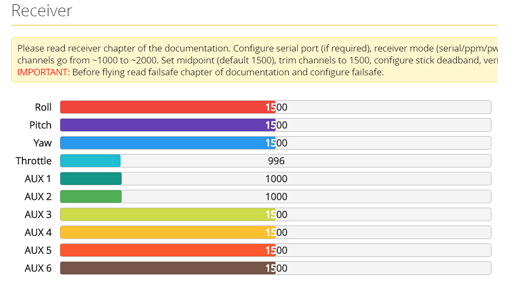
В нижнем положении стика Газ эта цифра не должна быть выше значения 1000. Если оно выше, читайте статью по ссылке выше или уменьшите это число через меню настроек в пульте.
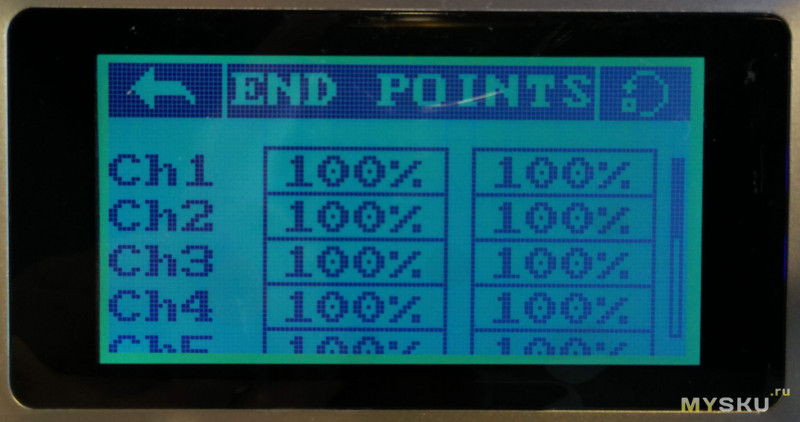
Теперь нам нужно настроить пульт так, чтобы при выключении пульта или потери сигнала, приемник на дроне дал команду контроллеру на снижение оборотов двигателей. Заходим в меню пульта в «End Point», выбираем канал Ch3 и кнопкой ОК увеличиваем значение до 101%:
Нажимаем Cancel и удерживаем для сохранения настроек. Теперь идем в бетафлай и проверяем значение (раздел Receiver). Поднимаем до упора стик газа и опускаем до самого низа. Значение должно быть немного ниже 1000, например 996.
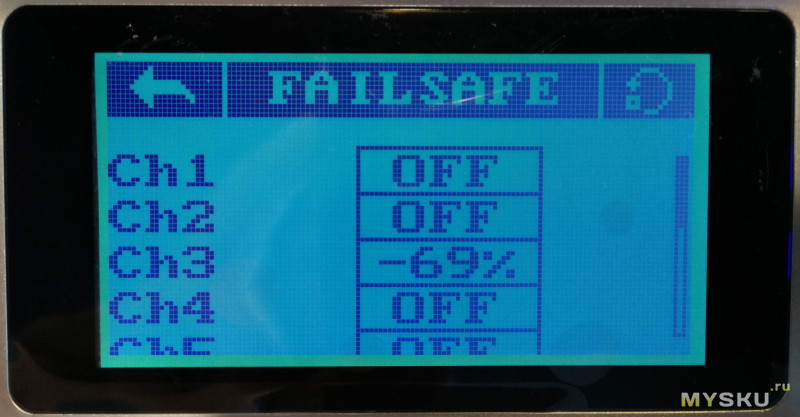
Теперь возвращаемся в меню «System Setup». Выбираем «RX Setup» и потом «Failsafe»:
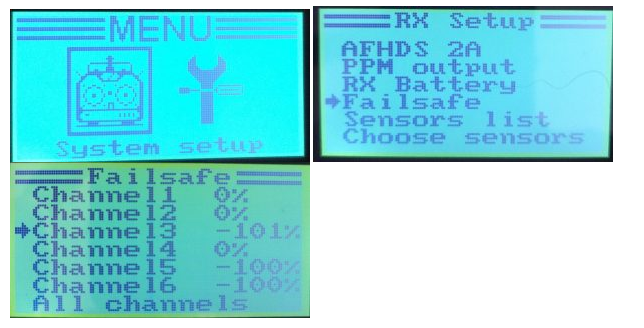
Выбираем «Channel3″ с помощью кнопок Up и Down сделайте -101% как на картинке выше, нажимаем OK. Снова идем в бетафлай и проверяем, какие у нас там будут цифры. Если значение больше 1000, то в «End Point» увеличиваем значение до 102%.
Далее, в Betaflight Configurator нужно настроить сам режим FailSafe, для этого включаем режим эксперта, эта кнопка находится здесь:
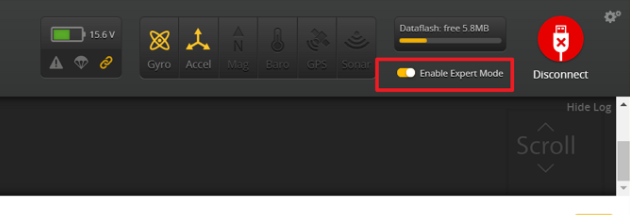
Далее, переходим во вкладку «FailSafe», и в блоке «Valid Pulse Range Settings» ставим значение «996»:
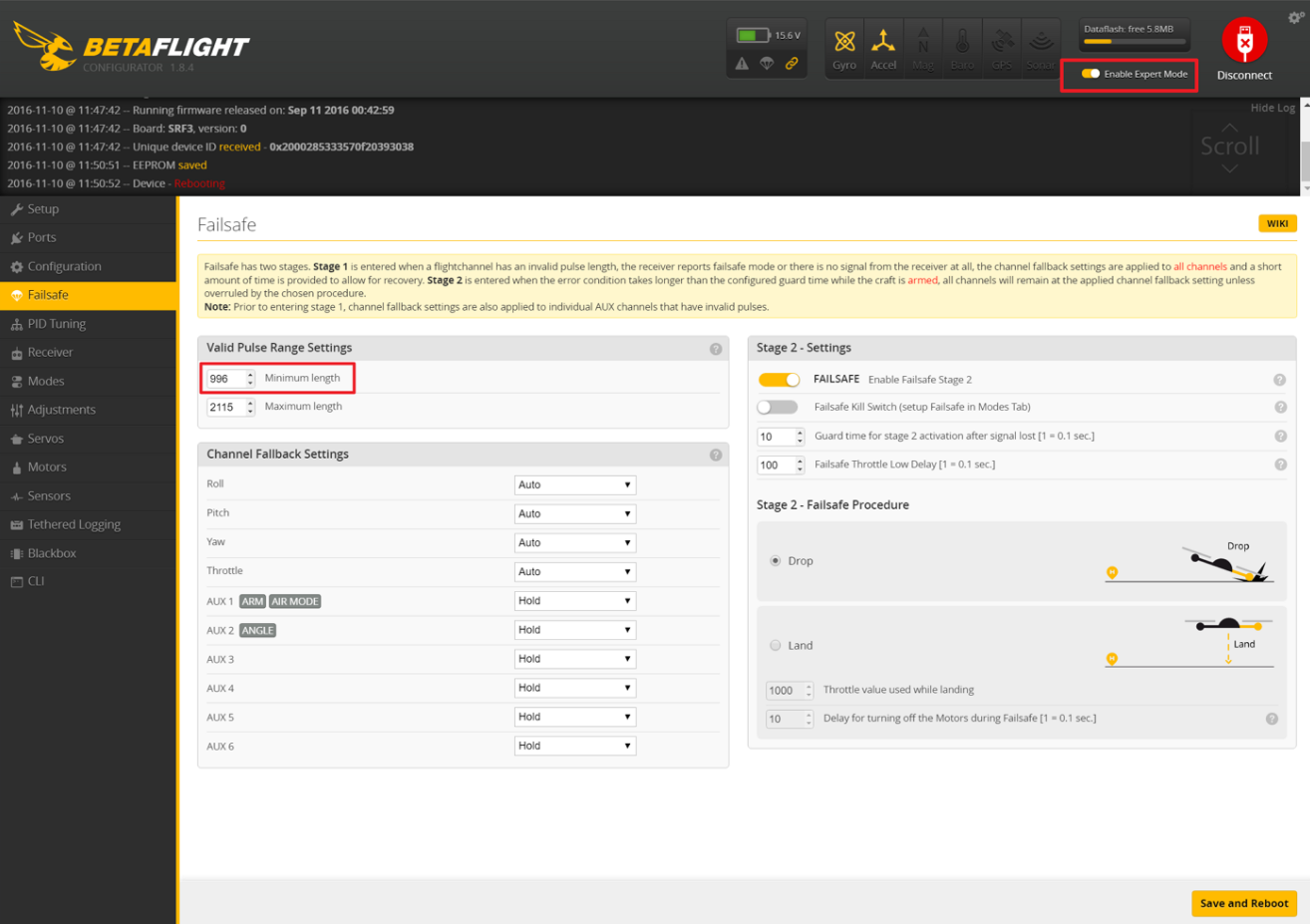
Нажимаем Сохранить и перезагрузить.
Теперь нужно убедитсья, что файлсэйф работает, для этого переходим во вкладку Receiver, включаем аппаратуру и дрон и смотрим на значение газа, оно должно быть 1000. Теперь отключаем пульт, значение газа должно стать 996.
Вот и все, вы настроили FailSafe. Теперь, при потере связи, дрон будет падать, либо опускаться, а не лететь дальше, пока аккумуляторы не сядут.
Если не получилось настроить по статье выше
Попробуйте настроить по этому видео:
Если вы повредили антенны этого приемника и вам нужно их поменять, тогда прочитайте эту статью: Как поменять антенны приемника fs-ia6b и fs-ia10b
Содержание
- 1 Описание
- 2 Где купить FlySky iA6B
- 3 Характеристики
- 4 Уменьшение размера
- 5 Распиновка контактной платы
- 6 Где купить FlySky iA6B
- 7 См. также
Описание[править]
FlySky iA6B — компактный 6-и канальный приёмник. Идеально подойдет для передатчиков Turnigy TGY-i6 или TGY-i10. Дальность действия более 500 метров. Особенность модели – двойная антенна для лучшего приёма сигнала.

Где купить FlySky iA6B[править]
- Найти все предложения от магазинов по продаже FlySky iA6B
Характеристики[править]
- Каналы: 6
- Частота: 2,4 Гц, диапазон частот ISM
- РФ мощность: <20dBm
- Напряжение: 4.0-6.5В
- Рабочий ток: 240 мА
- Вес нетто: 17 г
- Размеры: 47x25x13 мм
- Дальность действия: не менее 500 м
- PPM-выход: есть
Уменьшение размера[править]
Даже без корпуса приёмник FlySky iA6B имеет высоту минимум 15мм за счёт того, что к его торцу припаяна перпендикулярно плата с выводами. Её можно отпаять и получить толщину приёмника порядка 7-8 миллиметров.
На приёмнике FlySky iA6B есть микрокнопка для обновления прошивки. Её можно выпаять, чтобы она не мешала.
Распиновка контактной платы[править]
Контактная плата, расположенная внутри приёмника перпендикулярно к основной плате.
Где купить FlySky iA6B[править]
- Найти все предложения от магазинов по продаже FlySky iA6B
См. также[править]
- Приёмник FlySky iA6
- Пульт Flysky FS-i6
Есть у меня несколько коптеров и самолетов, успешно эксплуатировал с ними аппаратуру FS TH9x. Менял прошивки, сделал подсветку, перевел питание на литий… Менять аппу, честно говоря, не планировал. Но так мне понравился внешний вид пульта FS-i6S, что я не устоял. Кстати подвернувшаяся распродажа на Banggood, 2 недели ожидания, и вот коробка у меня.
Это будет обзор не столько ради самого товара, сколько для описания особенностей подключения, с которыми я столкнулся впервые.
Мне удалось «выиграть» его в snap-распродаже, когда давалось ограниченное количество товара по сниженной цене. Отправлено 10 сентября, получено 21.
Упаковка стандартная: чёрный пакет, пара слоёв пенки и сама коробка. Доехало без происшествий и весьма быстро.
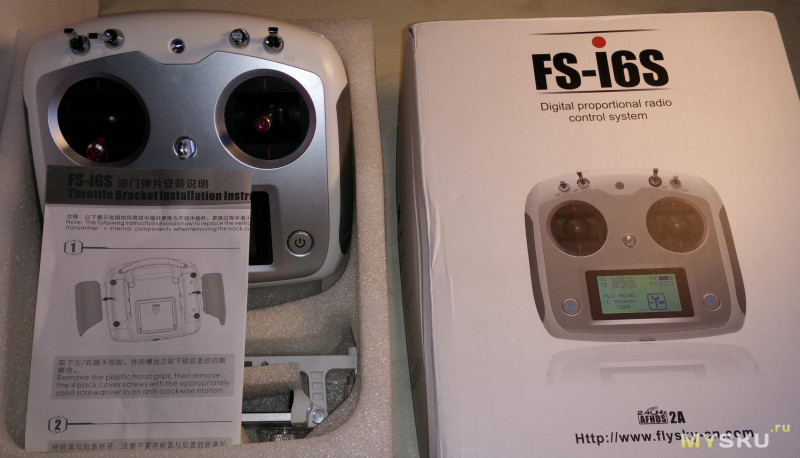
Коробка приличных размеров, с формованным изолоном внутри, плотно укутывающим содержимое.
Одним словом, вопросов к упаковке нет.
ЗАЯВЛЕННЫЕ ХАРАКТЕРИСТИКИ
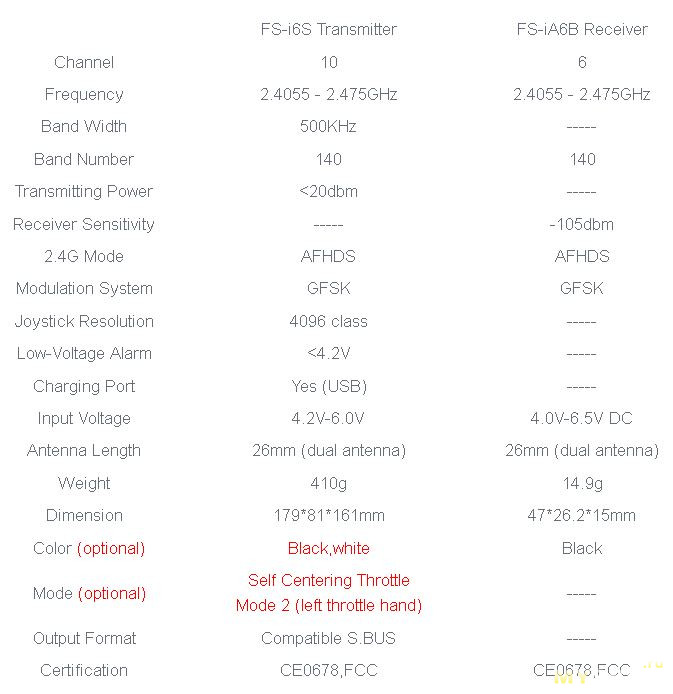
Что имелось в виду под словами «Charging port — Yes (USB)» — для меня загадка. Батареи он не заряжает.
КОМПЛЕКТАЦИЯ
— Пульт
— Приёмник
— Bind-кабель
— Брэкет для крепления телефона/планшета.
— MicroUSB кабель длиной около 1м.
— Набор для изменения режима работы стика газа (пружинка, скоба и т.д.,)
— МиниCD с инструкцией в формате pdf на китайском и английском языках.
— Инструкция по разборке и смене режимов работы стика газа на китайском и английском языках.
USB Кабель среднего качества, USBDoctor сказал что больше 0,5А он не держит, поэтому использовать его особо нигде не получится.
Вот детали для изменения режима работы стика газа. Использовать их не планирую. Прямо из магазина аппа была без подпружиненного газа, чем я очень доволен.

ФУНКЦИОНАЛЬНЫЕ ОСОБЕННОСТИ
Пульт производит очень приятное впечатление, и в этом плане точно не разочаровал меня. Не слишком тяжелый, но и не игрушечно-лёгкий, из толстого пластика с цепкими резинками для ладоней по бокам – его приятно взять в руки.

Ощущается монолитным, ничего не скрипит и не люфтит. Если поставить себе цель придраться – можно найти небольшие зазоры под декоративными накладками переключателей, можно найти неидеальный стык – но это именно что придирки и поиски с лупой.
Встроенные антенны — значит еще меньше торчащих снаружи элементов, это плюс.
Вот как он выглядит в моей руке:

Питание – 4хАА. Очень жаль, что производители всё еще не спешат отказываться от батареек. То, что оправдано на пультах, идущих в комплекте с игрушками (коптерами микро размера, машинками 1:32 и т.д.) выглядит анахронизмом в устройстве с претензией на серьёзность. Вероятно, буду так же переделывать на литий с зарядкой через существующий порт microUSB.

Включается/выключается пульт одновременным нажатием на кнопки питания по обе стороны от экрана. Интересное решение, случайно выключить пульт вряд ли выйдет, равно как и включить его, например, во время транспортировки.
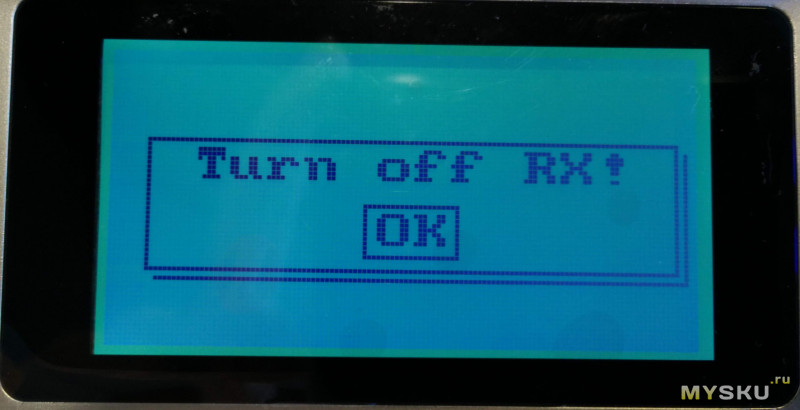
Забегая вперед скажу, что при включенном приёмнике пульт отключаться отказывается, и требует сперва обесточить приёмник.
Стики очень цепкие, торцы снабжены откручиваемыми анодированными «коронами». Ход приятный, плавный, понравился больше чем на FS1.

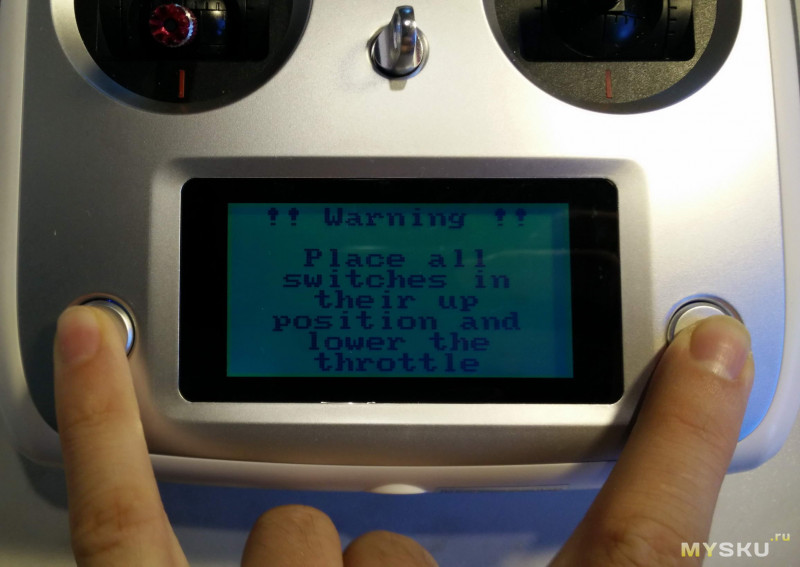
В верхней части корпуса расположены 4 переключателя, слева-направо: SWA.. SWD. A и D – двухпозиционные, B и C – трёхпозиционные. При включении пульт требует установить все переключатели в положение «от себя».

На скругленных боковых гранях имеются 2 самоцентрирующихся колёсика, вероятно, их удобно использовать для корректировки угла наклона/поворота FPV камеры.

С обратной стороны прямо под пальцами незаметно расположились 2 плоские серебристые кнопки. Металлическая скоба выглядит отлично и дополняет общий дизайн пульта.

Удобство размещения кнопок, на мой взгляд, среднее, пальцы не дотягиваются при обычном хвате, но это индивидуальный момент.

И да, петелька для шнурка на шею присутствует там, где ей и положено быть.
Брэкет под сотовый или небольшой планшет сделан качественно. Металл, толстый пластик.


Крепится к пульту на двух точках — специальное гнездо под болт и фиксация на петле для шнурка. Чтоб возможность использовать шнурок осталась, на брекете есть своя петелька.
Масимальное раскрытие упоров:

С патентованым имитатором айфона:

С телефоном весом около 160-180 грамм, баланс пульта меняется не сильно, пользоваться вполне удобно.
В нижней части пульта имеется порт PS/2 для подключения UART устройств, типа GPS, WIFI или Bluetooth. Таковых не имею, прокомментировтаь не могу.
При подключении к компьютеру через microUSB пульт определяется как стандартный HID-джойстик и может быть использован для тренирвки на пилотажном симуляторе типа Phoenix. Порт microUSB используется и для прошивки, конечно.

ИНТЕРФЕЙС, НАСТРОЙКА
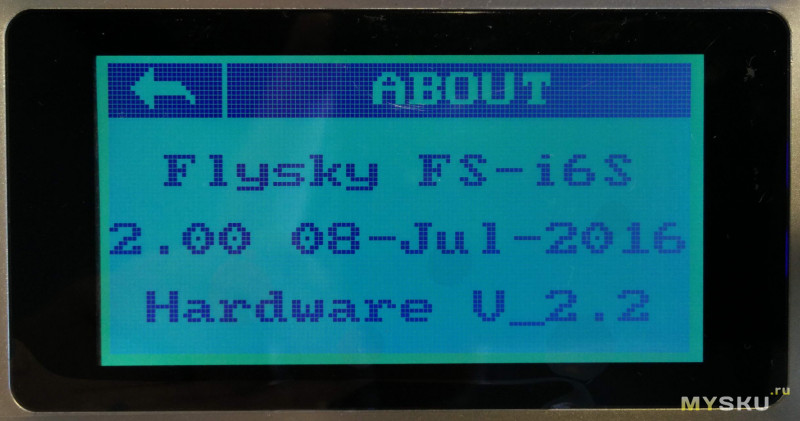
Прошивка «из коробки» 2.0, аппаратная ревизия 2.2. Более новых прошивок на момент написания обзора я не нашел.
Логотип при включении:
ЖК экран монохромный, с голубовато-белой подсветкой, сенсорный. Углы обзора обычные, при просмотре под углом сбоку изображение инвертируется, блекнет, но при обычной эксплуатации такая ситуация вряд ли наступит. На солнце картинку видно хорошо.
Подсветка отключается после минуты бездействия пользователя в меню. Так выглядит включенный пульт без подсветки:

Сенсор емкостной, чувствительность отличная, не ложнит и не тупит. Можно придраться к невысокой скорости отклика экрана, которая выражается в лёгкой смазанности изображения при быстром скролле.
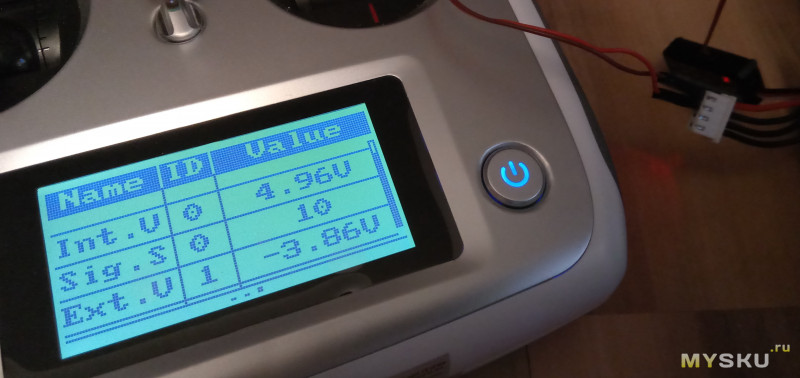
Экран можно листать вправо-влево, меняя режимы отображения – состояние стиков и переключателей / таймеры, настройки, графические индикаторы батарей TX, RX / напряжения на TX, RX, уровень сигнала (да, базовая телеметрия имеется, и функционал её расширяется сенсорами: FS-CPD01-магнитный, FS-CPD02-фотоиндукционный, FS-CTM01-температурный, FS-CVT01-вольтметр, которые подключаются к порту SENS приёмника).
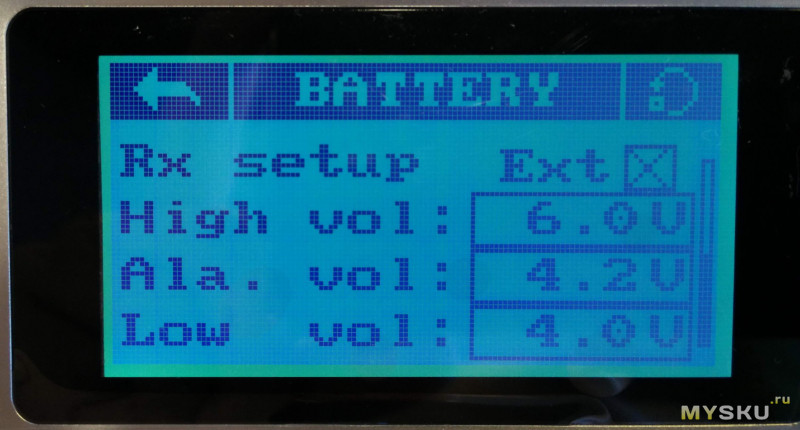
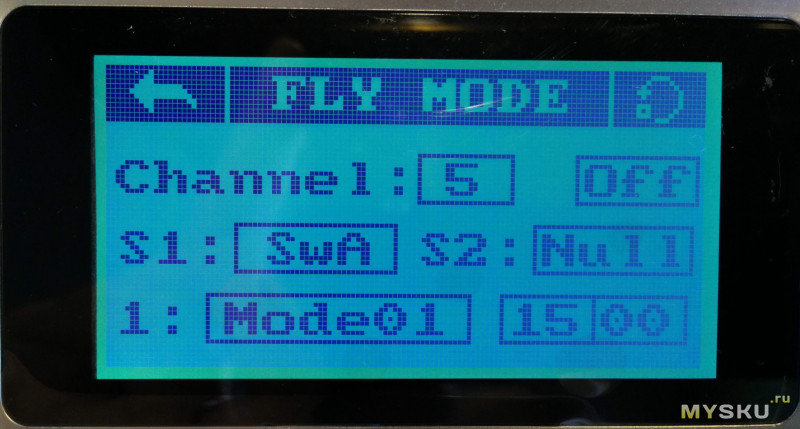
Основной экран №1 с таймерами, кнопкой входа в настройки, уровнями батареи TX и RX и полётным режимом.
Щелкнув по символам батарей можно установить параметры отображения уровня напряжения: минимальное и максимальные значения.
Присутствуют таймеры, 2 штуки.
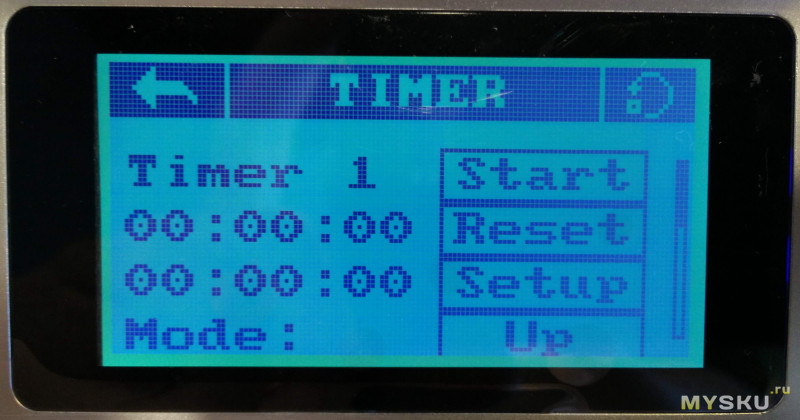
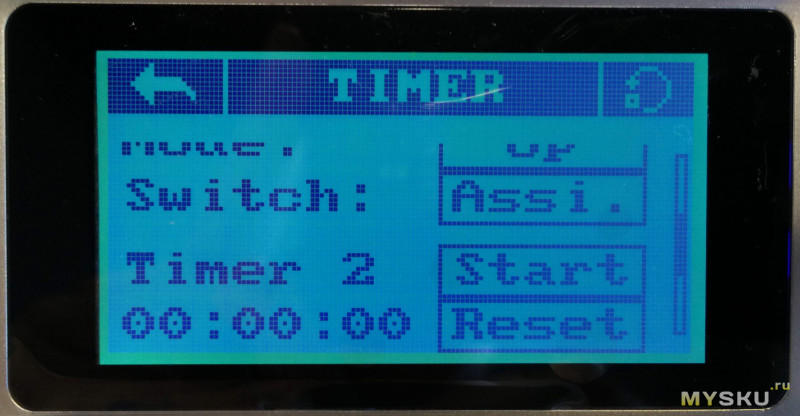
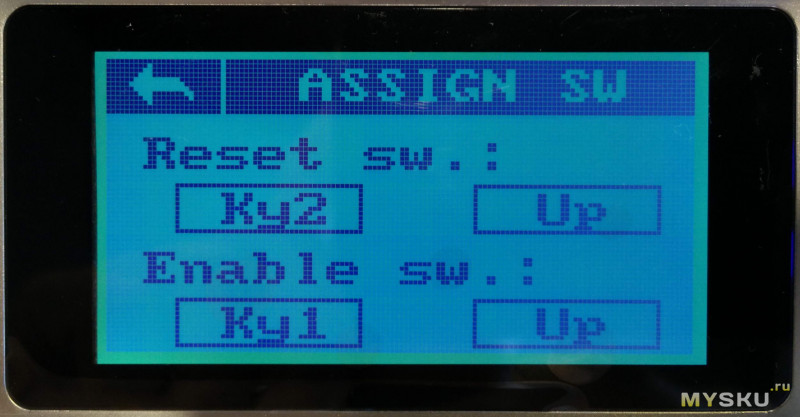
Запуск/остановку и сброс можно повесить на кнопки или переключатели. Т.е. например переключатель SWA включает/останавливает таймер, кнопка KY1 — сбрасывает.
С полётными режимами пока не разбирался, прошу прощения. Знаю лишь что там можно назначить переключение этих самых режимов (всего их 9) на переключатели B и С, а затем разными комбинациями оных включать необходимый.
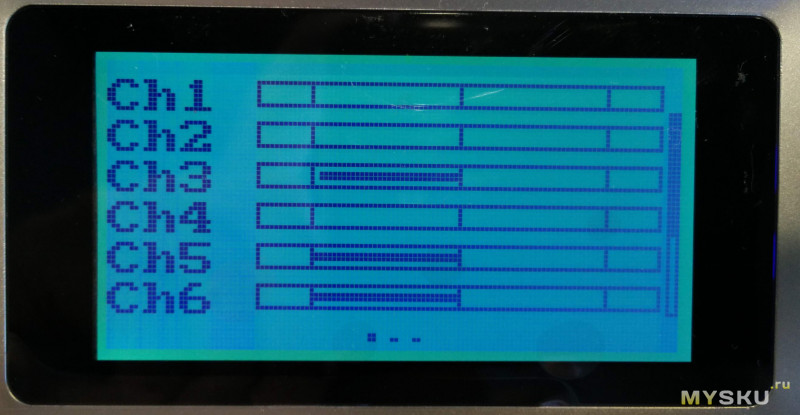
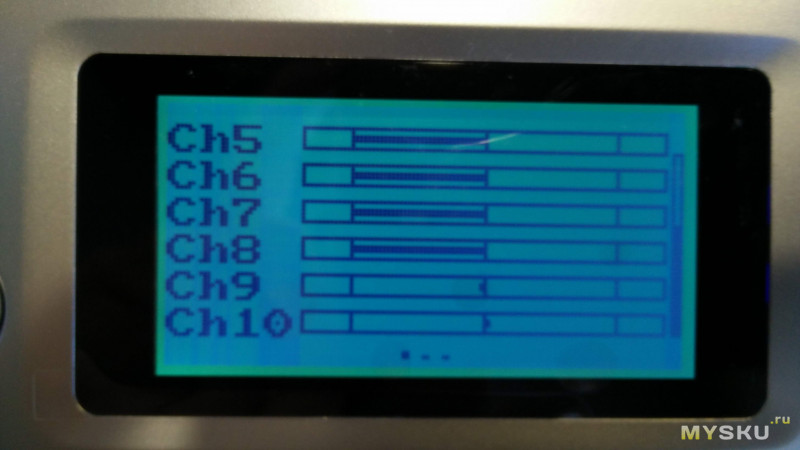
Экран №2 — состояние каналов (стиков, переключателей, колёс). Для отображения всех 10 каналов придётся скролить вниз. Длительное нажатие на экран запустит тест каналов, не забудьте снять пропеллеры!..
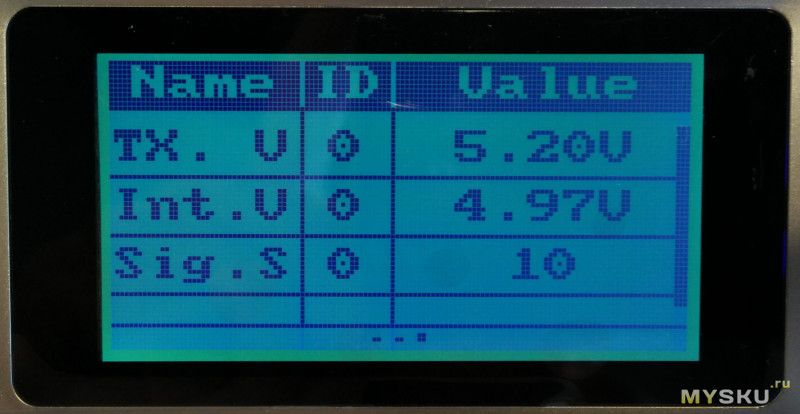
На экране №3 отображается уровень напряжения батарей пульта (TX) и, когда есть связь с передатчиком, напряжение RX и уровень сигнала по 10-балльной шкале.
ПУНКТЫ ГЛАВНОГО МЕНЮ Function и System
Щёлкнув по кнопке с ключом и отверткой попадаем в меню настроек.
Язык меню английский. Все пункты понятны и знакомы всем, кто имеет дело с миром RC.
FUNCTION:
Структура меню:
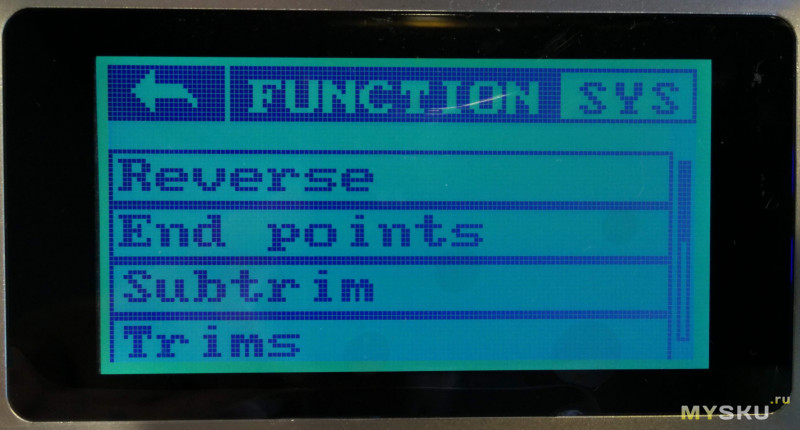
Пройдемся по пунктам:
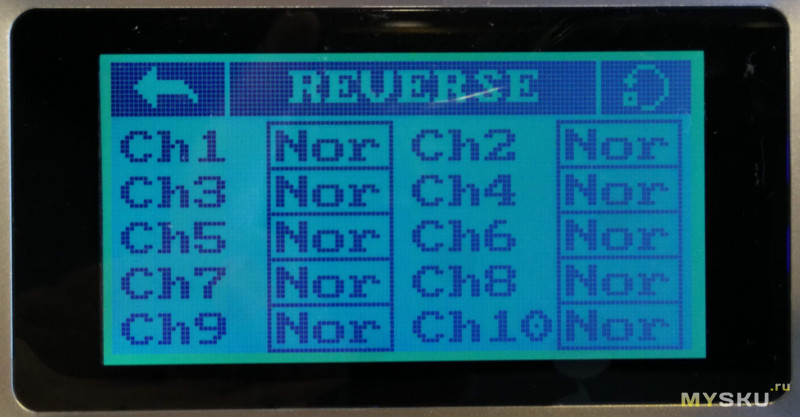
Reverse
Реверс каналов.
End points
Установка конечных точек. По сути — лимитирование расходов.
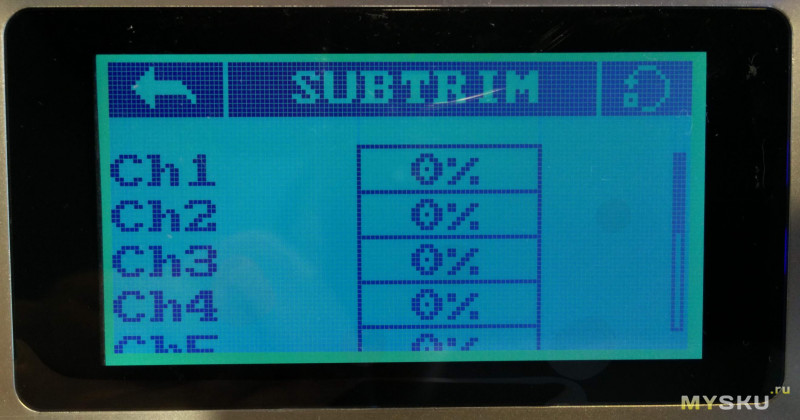
Subtrim
Триммирование каналов, смена центральной точки, если вдруг модель кренит в какую-либо сторону. «Оперативный» трим (без копания в меню) не предусмотрен, это минус. Полагаю, подобное тоже можно решить в будущих обновлениях прошивки, например добавить еще один виртуальный экран как раз с такими ходовыми подстройками.
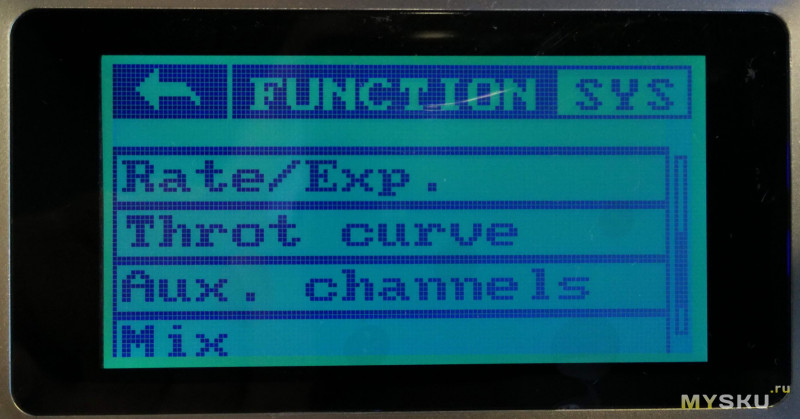
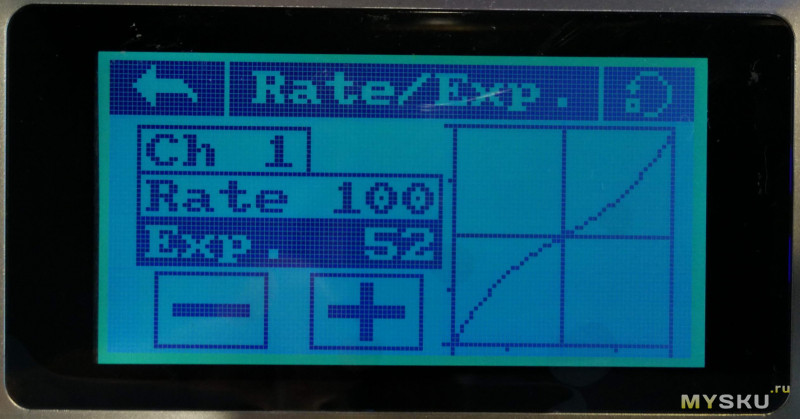
Rate/exp
Настройка расходов и кривых. Просто, удобно, наглядно.
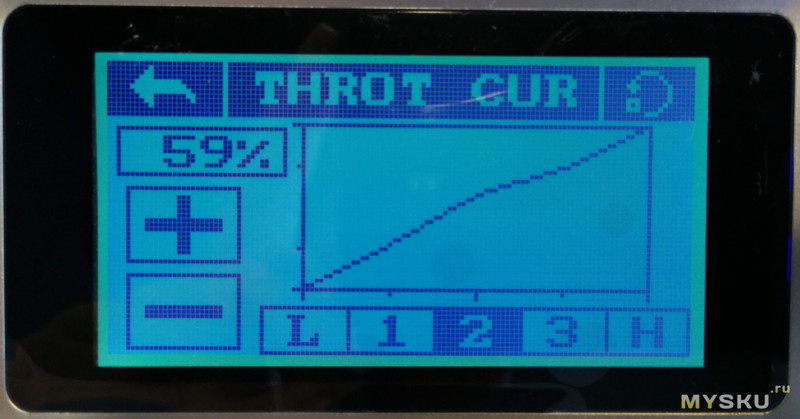
Throt curve
Установка кривой газа.
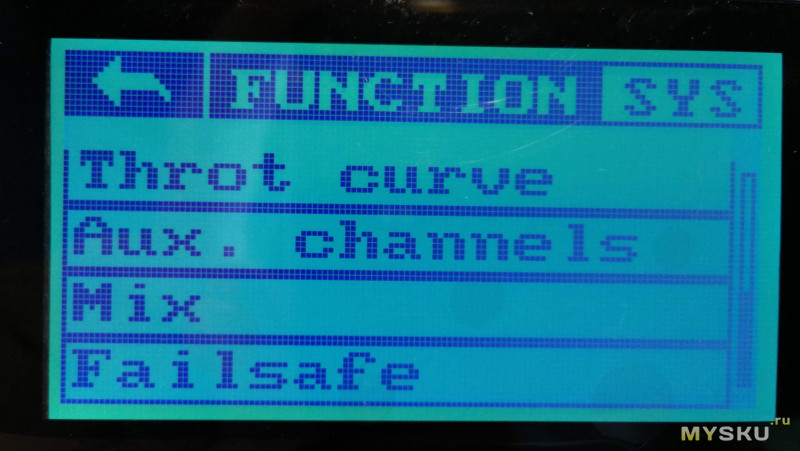
Aux. channels
По-умолчанию стики не задействованы. Для их включения надо зайти в это меню и включить.
Mix
Микширование каналов. На коптере не применяю.
Failsafe
Настройка поведения при нештатных ситуациях, типа пропадания связи с пультом. Работает исправно, проверил на примере канала газа.
SYSTEM:
Структура меню:
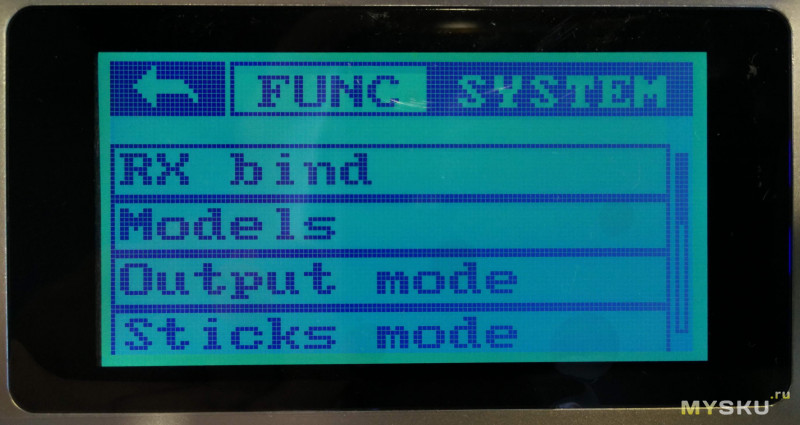
Большая часть пунктов недоступна если есть связь с приёмником.
При попытке входа в подпункт мы получаем сообщение:
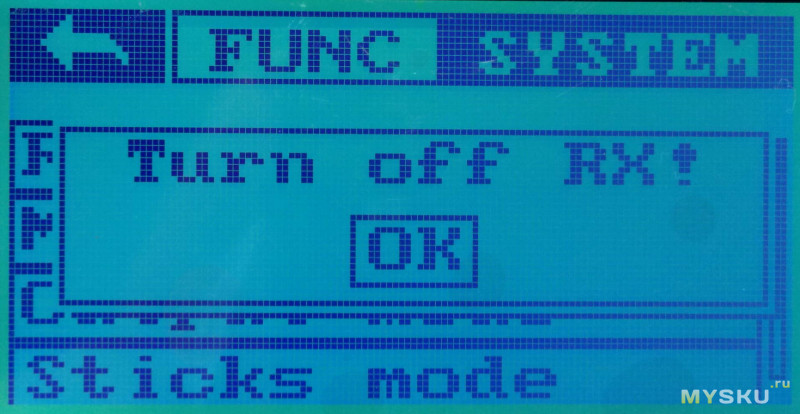
Пройдем по пунктам:
RX Bind
Привязка приёмника к передатчику. Комплектный приёмник привязан сразу.
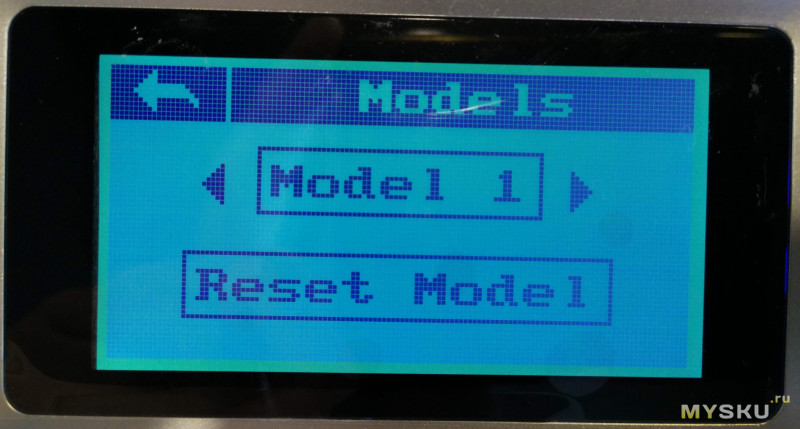
Models
Поддержка нескольких моделей появилась не сразу, но сейчас новая прошивка уже «прямо из коробки» поддерживает эту функцию.
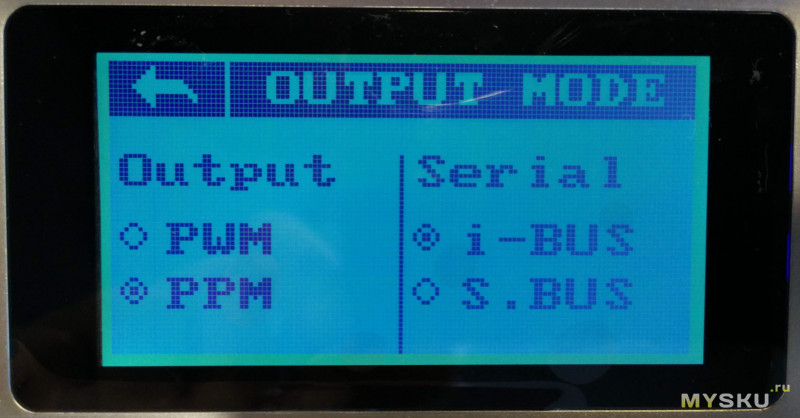
Output mode
Выбор формата выходного сигнала приёмника. Сейчас я использую iBus.
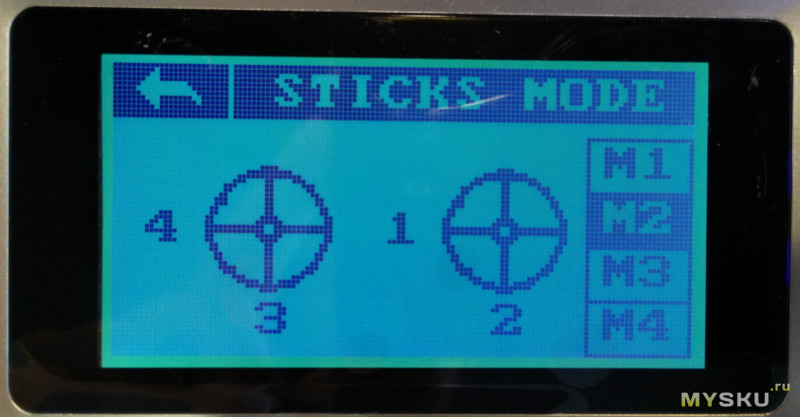
Sticks mode
Выбор режима стиков. У меня mode2 — газ слева.
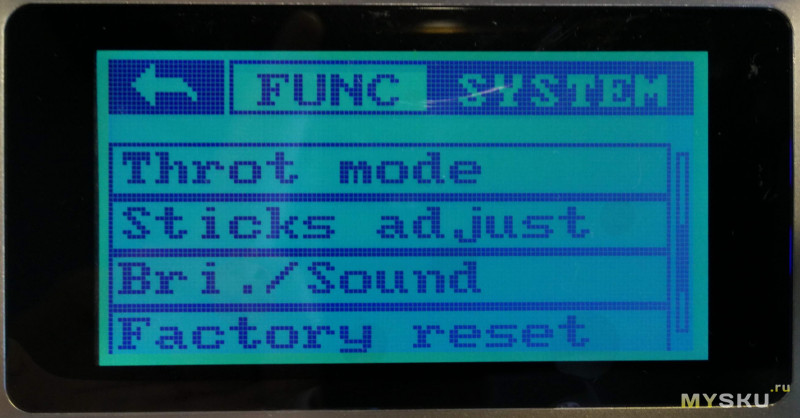
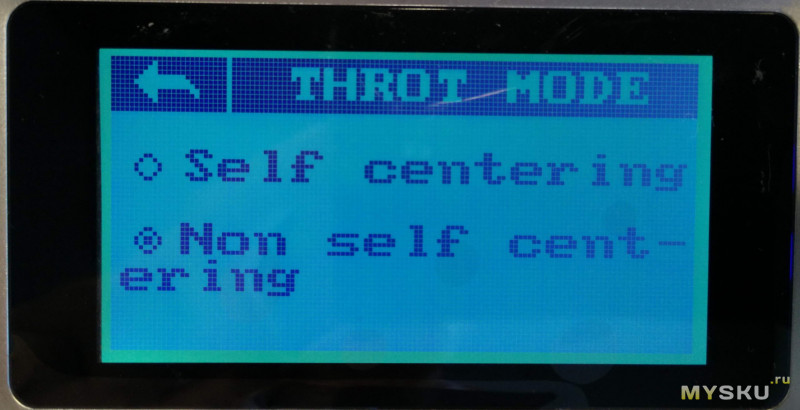
Throt.mode
Самоцентрирующийся стик газа или нет — указываем тут.
Sticks adj.
К сожалению из этого подменю аппаратура выйти не даёт — видимо глюк прошивки.
Ничего сделать в нём нельзя, только посмотреть на пределы работы стиков и колёс.
Bri./Sound
То, что в меню назвали «яркостью» — на самом деле регулировка контрастности, подсветка всегда светит одинаково и выключается автоматически по неактивности пользователя.
Максимальный контраст:
Минимальный контраст:
Озвучка событий (включение/выключение, установка/потеря связи с приёмником и т.д.) имеется, но выбирать какое событие озвучивать — нельзя. Громкость регулируется нижним ползунком в не очень широких пределах.
Если пульт не трогать пару минут, он начинает напоминать о себе звуковым сигналом.
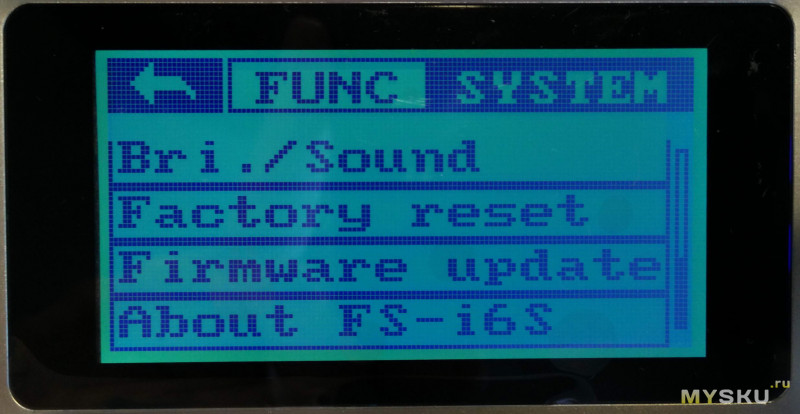
Factory reset
Сброс настроек.
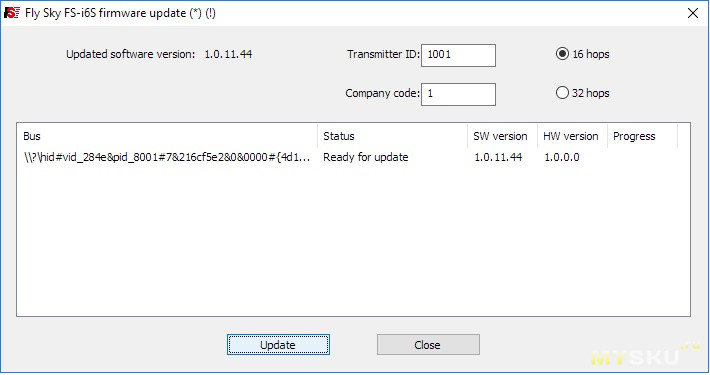
Firmware update
Вход в режим обновления прошивки.
Вид окна прошивальщика:
About
Информация о прошивке и железе.
Теперь я хотел бы рассказать об опыте эксплуатации этой аппаратуры с коптером Eachine Racer 250, прошивкой Librepilot и подключением по iBUS.
ПОДКЛЮЧЕНИЕ И НАСТРОЙКА КОПТЕРА
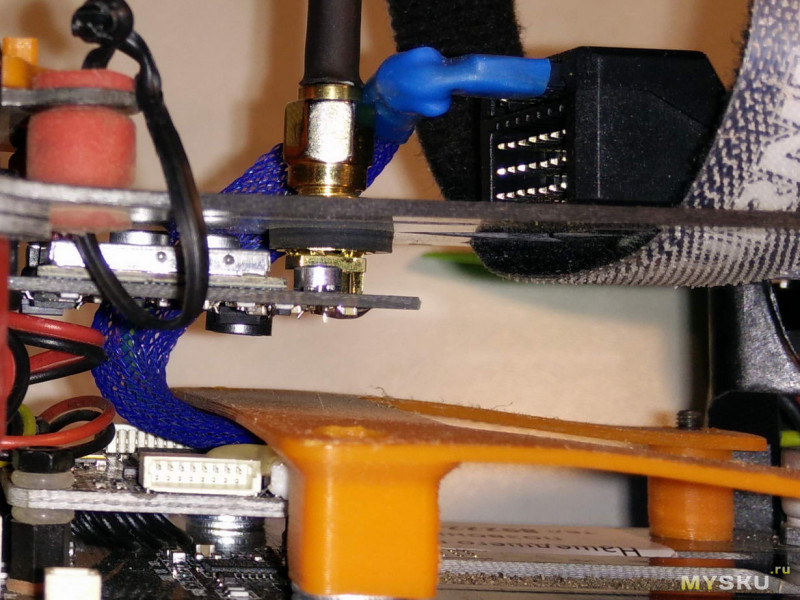
Один из моих коптеров – Eachine Racer 250, прошитый Librepilot (наследник Оpenpilot). На нём был установлен приемник FS-R8B, подключенный к CC3D в режиме PWM.
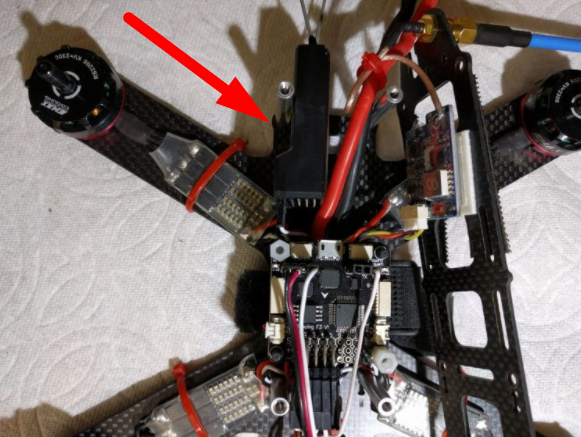
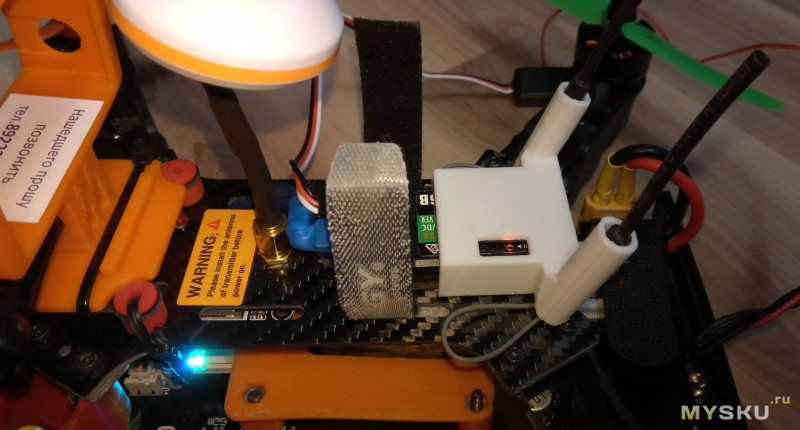
Теперь там разместился FS-iA6B. Такой вот тараканчик, крепеж под антенны ещё не напечатал.
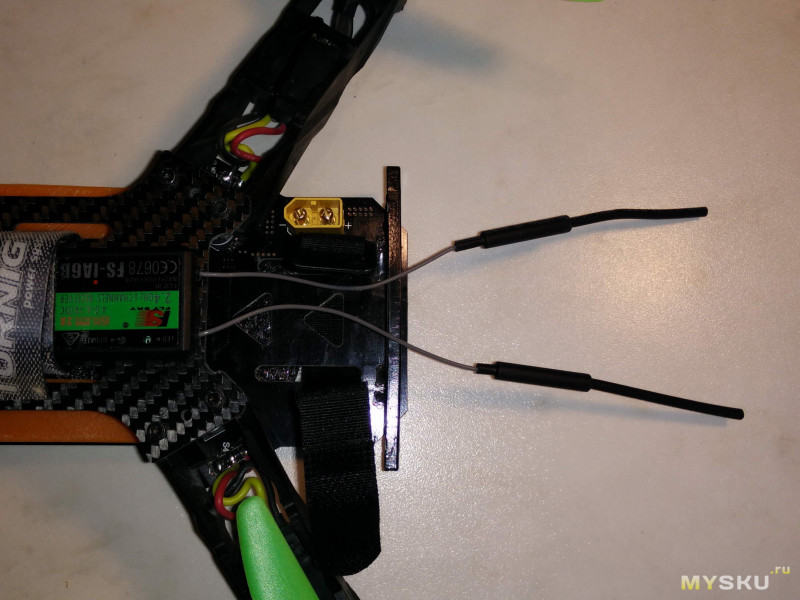
Признаться честно, до покупки FS-i6S2 я ничего не знал о iBUS, и решение использовать этот протокол появилось спонтанно. Соединил порт приёмника «SERVO» и порт Flex полётного контроллера кабелем из комплекта ER250, используя 3 провода: желтый, красный, черный (голубой не подключен)

Кабель убрал в плетёнку, закрепив термоусадкой. В меру аккуратно, ничего не торчит.
После подачи питания приёмник включился, пульт его обнаружил, приветственно пропиликав. В настройках пульта выбрал протокол iBUS. Пол-дела сделано, решил я.
Но, погуглив, я выяснил что Librepilot 15.09 не поддерживает iBUS, и надо переходить на Betaflight или Cleanflight. Нашел инструкцию на youtube, где всё выглядело довольно просто.
И конечно же всё пошло через одном место…
Прошив в Librepilot прошивку от Betaflight я не получил ожидаемый com-порт в списке устройств, да и сам CC3D при включении вовсе не спешил играть стартовую мелодию движками. Горел зеленый индикатор и всё. Снова погуглил, выяснил что вроде как надо сперва подключить батарею, и лишь потом подключать контроллер к компьютеру. Но и это не помогло. При таком способе я получил «неопознанное устройство USB». Расстроился весьма, прямо скажем… Разбирать коптер, подключать программатор, вспоминать, что да как — не хотелось абсолютно.
Но тут я заметил, что при подключении CC3D к компу (без батареи) винда проигрывает звук обнаружения нового устройства и ни на что не ругается, а значит всё не так плохо. Покопавшись в списке устройств, понял, что контроллер определяется как стандартное устройство HID, и Librepilot его не видит, т.е. прошить всё назад вроде как не выйдет.
Решил попробовать подсунуть ему драйвер openpilot, на что получил решительный отказ. В порядке общего бреда подправил inf файл драйвера, вписав туда ID устройства (да, я извращенец). Драйвер он принял, но запускаться отказался, с кодом 43. Можно, наверное, долго было продолжать тупить, но опять помог гугл.
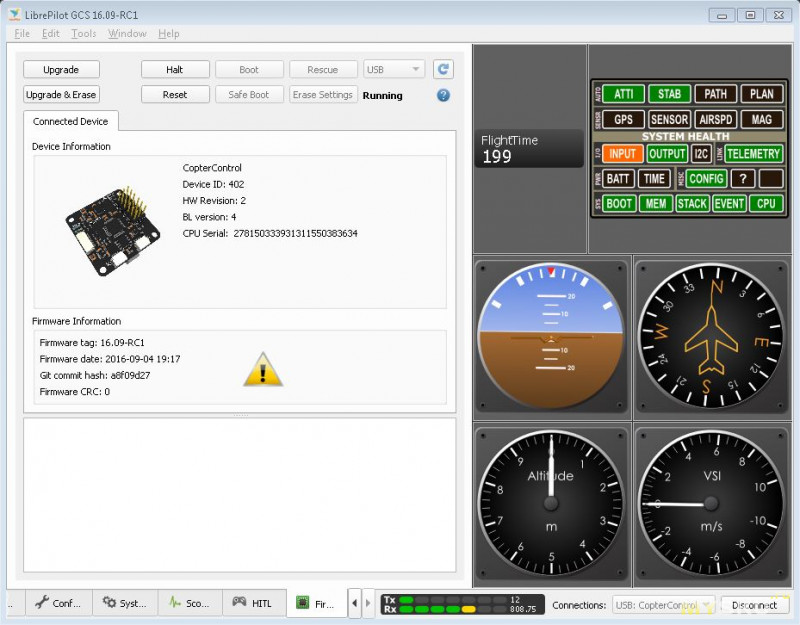
Ситуация разрешилась следующим образом: скачал c офсайта набор прошивок Librepilot (файл all_fw1509.tgz), извлек оттуда файл fw_coptercontrol.opfw, затем в GCS на вкладке Firmware нажал волшебную кнопку Rescue и прошил этот файл, после чего всё снова заработало.

В общем, перейти на Betaflight или Cleanflight простым способом у меня так и не получилось.
И сидеть бы мне и дальше на PWM, но к счастью, Librepilot внезапно выпустил версию 16.09RC1, в которой реализовали поддержку iBUS!
Обновил GCS и прошивку CC3D, и начал разбираться с настройкой. Оказалось всё просто.
В GCS на закладке «Hardware» у разъема flexi port выбрал пункт iBUS:
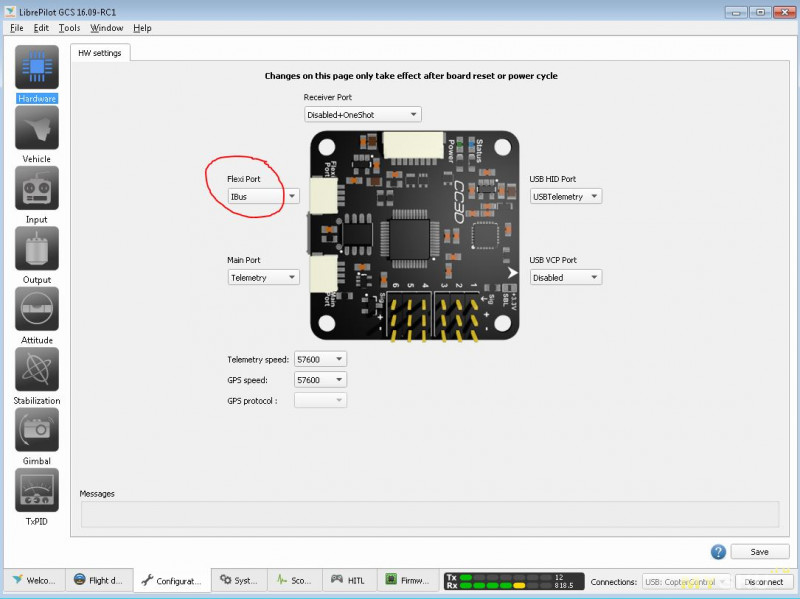
Затем на вкладке «Input» у нужных мне каналов выбрал опять таки iBUS, указал номера каналов – и всё заработало! Настройки управления теперь выглядят так:
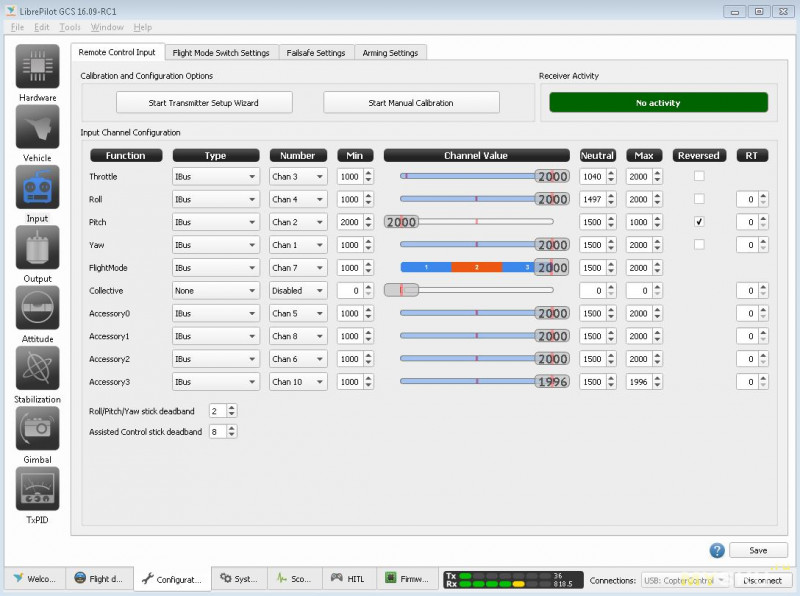
Главный сюрприз: 6-канальный приёмник FS-iA6B в режиме iBUS тянет аж 10 каналов!
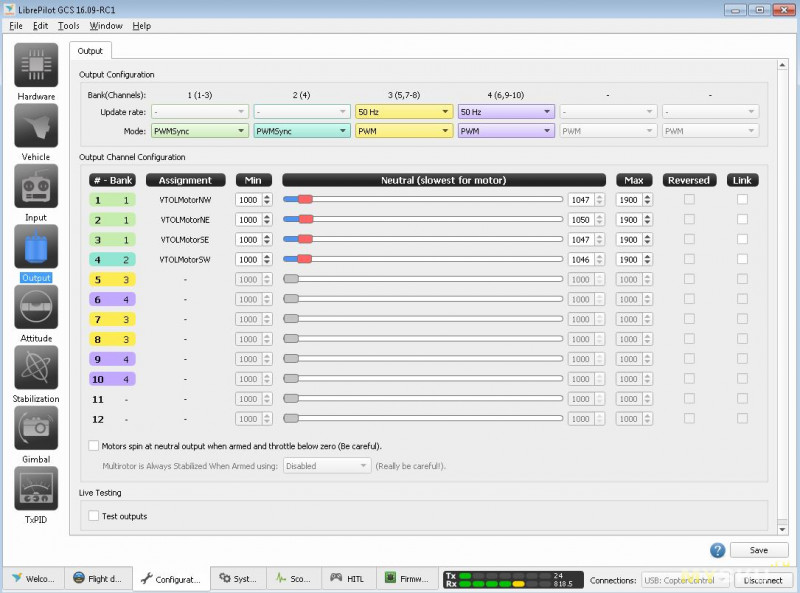
Запустил мастер конфигурации дрона, где выполнил калибровку ESC и задание начальной позиции старта моторов. Параметры стабилизации взял с какого-то похожего по ТТХ дрона из списка предложенных, всё подошло отлично.

Затем в мастере настройки передатчика успешно настроил все диапазоны стиков и переключателей.
Полетел коптер сразу, даже скучно как-то)))
Фото в анфас:

Вывод
Аппаратурой я очень доволен! Уверен, что не раскрыл и половины функционала в силу собственной неопытности. Поддержка телеметрии очень интересна, займусь этим как будет время. Для начала заказал сенсор Flysky FS-CVT01, самый дешевый (4$) и полезный, чтобы измерять напряжение на бортовом аккумуляторе:

Приятно, что аппа компактнее предыдущей, и прекрасно помещается в походный супер-чемоданчик. Со старой аппаратурой всё помещалось «в натяг».


Учитывая цену за которую приобрёл аппаратуру (ок. 2650руб) — доволен особенно! Даже обычная её цена вполне оправдана. Есть надежда на новые фичи в грядущих прошивках, да и так функционал неплох, равно как и исполнение. Минусы прошивки буду рано или поздно исправлены, не производителем, так энтузиастами. Смело рекомендую!
Вот первый выход в поля с новым железом:
[upd 30.10.2016] Нарисовал и напечатал крепёж для антенн:
SKP файл
STL-файл
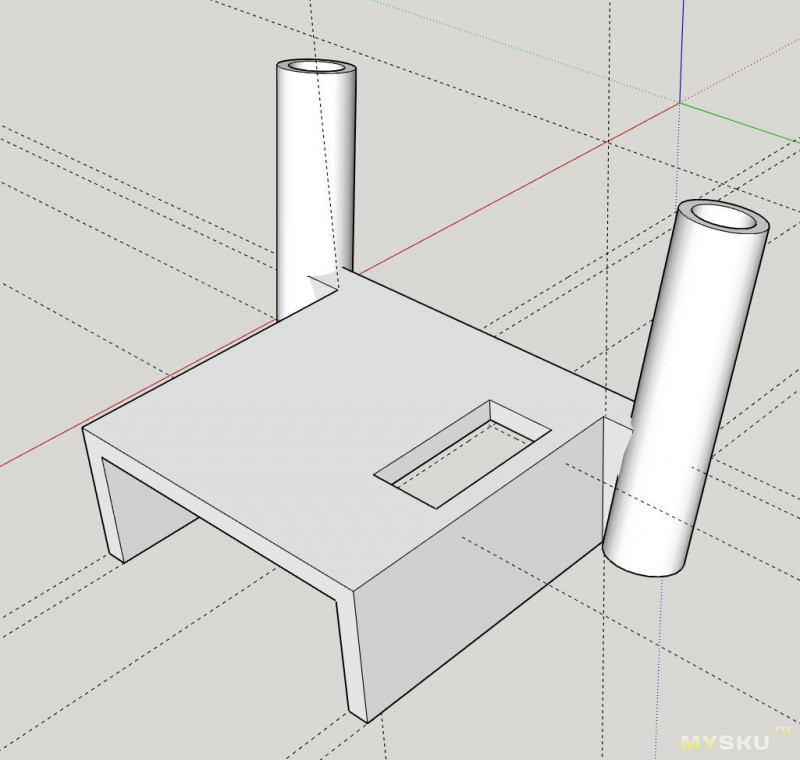
Фото в жизни:
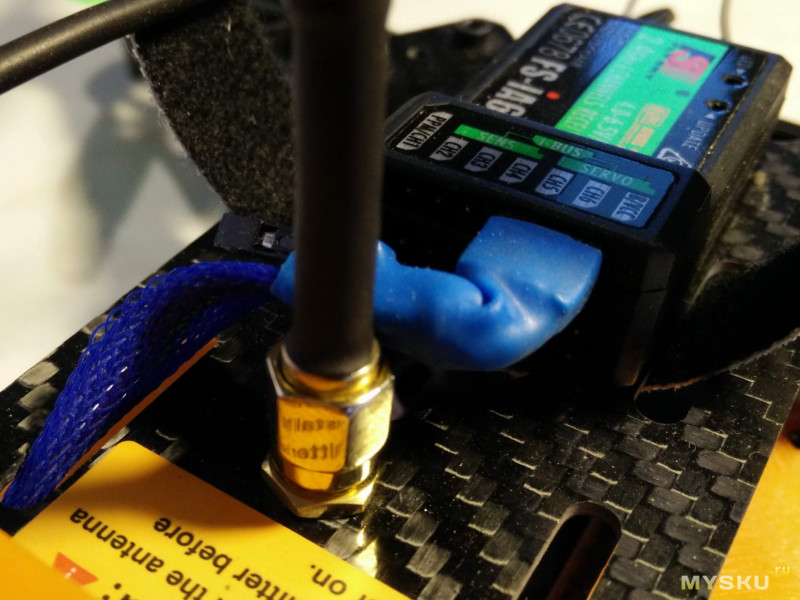
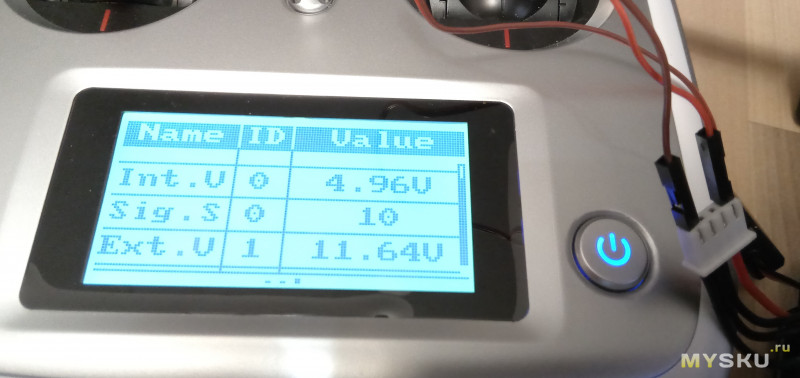
Так же приехал сенсор Flysky FS-CVT01.
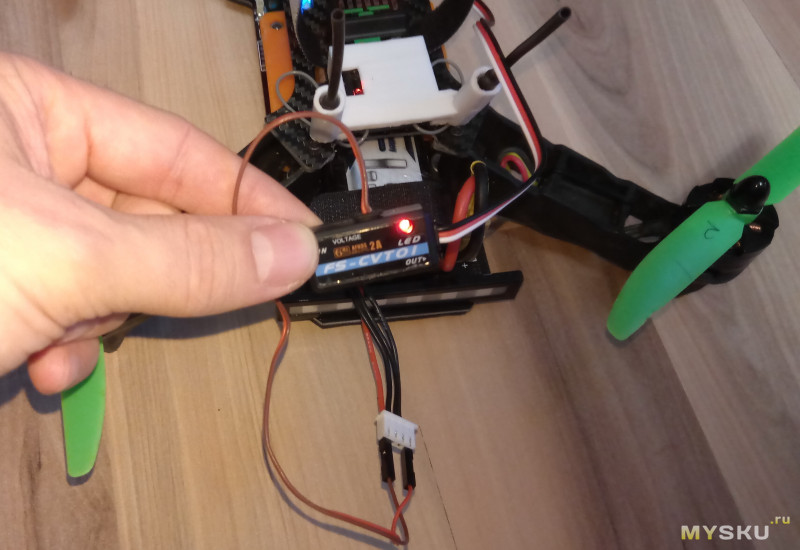
Пока на модель его не установил, но работоспособность проверил.
Подключается в разъём SENS на приёмнике.

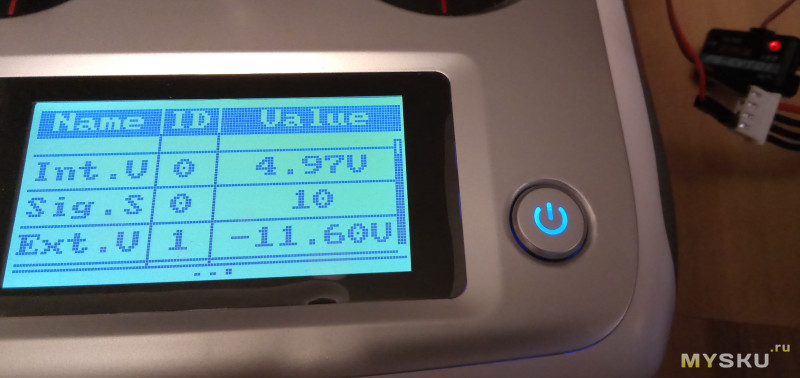
Полярность подключения проводов к батарее не важна, как в мультиметре перепутанная полярность будет отображаться символом «-«.
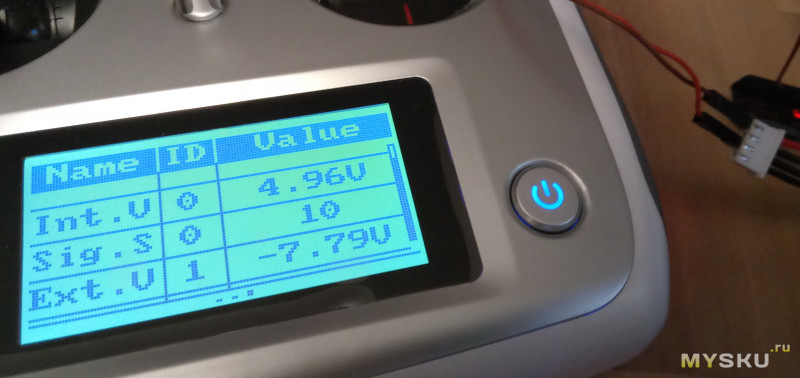
Точность хорошая.
Тэги: iBUS CC3D Librepilot Betaflight Cleanflight Eachine Racer 250 FlySky i6S FS-iA6B
Подключение аппаратуры удаленного управления FlySky (FS-i6 FS-iA6 FS-iA6B) к роботу на основе контроллера ESP32 (Arduino)
Удаленное управление роботом, актуальный вопрос, которого в то или иной степени касался каждый Конструктор роботов. Когда мой коллега, приобрел систему дистанционного управления FlySky, я отнесся к этому как к шагу назад, рассуждая, что мы и самостоятельно сможем делать подобные системы. Но, как показало время, создание качественных систем дистанционного управления непростая и недешевая задача. После того, как мы сделали и оттестировали один пульт на основе NRF24L01 и сконструировали несколько систем обмена информацией между роботами на основе данных модулей, я сделал вывод, что есть случаи, когда приобрести готовую систему дистанционного управления будет и дешевле и лучше/не хуже в эксплуатации.
Рисунок 1
В свое время также рассматривался вопрос удаленного управления по каналу Bluetooth («Мобильные роботы на базе Arduino»), это удобный и мало затратный способ, но имеет ряд ограничений:
- малая дальность (до 10 метров) что вполне достаточно для помещений, но затрудняет или делает не возможным управление роботами квадрокоптерами или гоночными болидами и пр.;
- низкая защита от помех, при зашумленности «эфира», возможны разрывы и «подтормаживания» соединений, что не страшно при связи с гарнитурой, но может привести робота к аварии;
- удобство — управление с экрана смартфона или планшета не возможно без визуального контроля, т.е. нужно периодически смотреть на экран, ведь рычаги управления не имеют тактильной обратной связи, они просто нарисованы на экране.
И, в связи с наличием перечисленных мнений и ограничений, попытаюсь рассказать о способах подключения к контроллеру Arduino (на примере ESP32) аппаратуры удаленного управления Flysky, на примере FS-i6 (рис.2).

Рисунок 2. Аппаратура удаленного управления FS-i6
Аппаратура состоит из передатчика (FS-i6) и приемника (FS-iA6 или FS-iA6B). Передатчик на заводской прошивке может передавать до 6 значений от рычажков управления, какие из 10 рычажков будут задействованы, настраивается из меню передатчика. Довольно просто установить альтернативную прошивку, которая дает возможность задействовать одновременно все рычажки управления (я ее установил c https://github.com/qba667/FlySkyI6/releases ), но суть не в этом, и останавливаться на замене прошивки я не буду.
Для управления роботом потребуется как приемник, так и передатчик. Отличия приемников FS-iA6 и FS-iA6B в наличии у FS-iA6B дополнительной шины (bus) о которой поговорим ниже.
Передатчик FS-i6 пока отложим в сторону (как синхронизировать/связать приемник и передатчик ищем в других документах) и подробнее рассмотрим приемники, начнем с FS-iA6, он изображен на следующем рисунке.
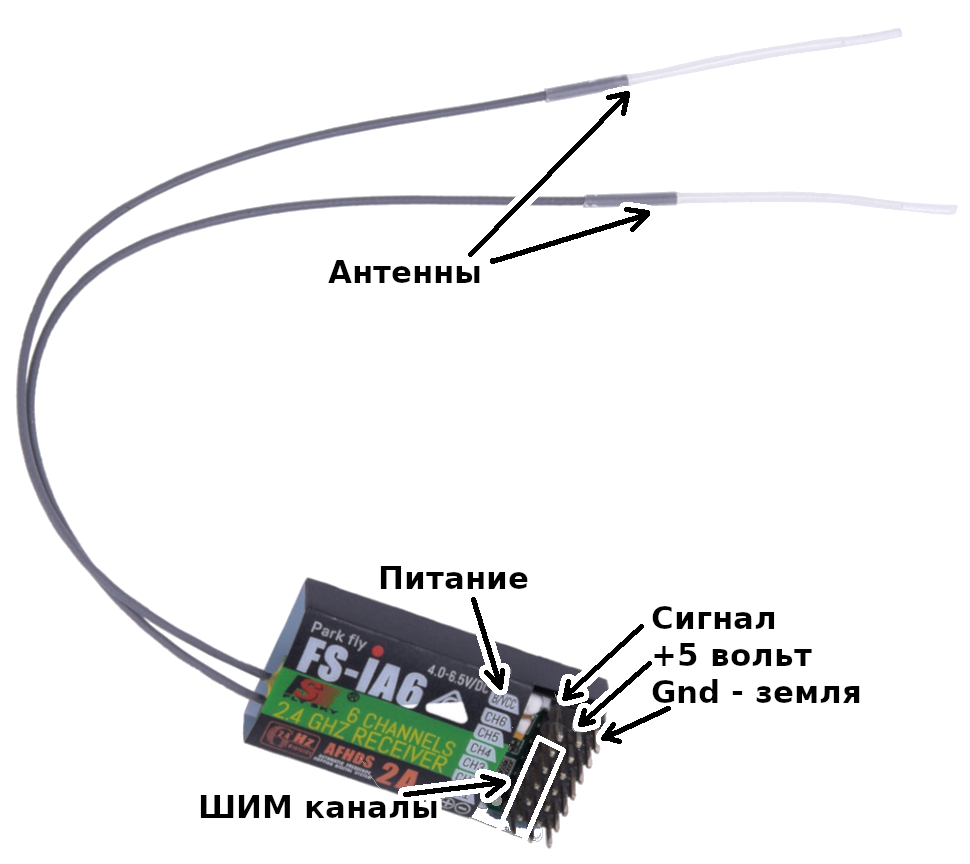
Рисунок 3
Питание приемника осуществляется через верхний ряд контактов B/VCC, ряды CH1-CH6 , это выходы, и если питание с приемника брать не нужно, то потребуется использовать только левый столбец контактов, на которых приемник генерирует ШИМ сигнал с шириной импульса соответствующей положению рычажков на передатчике. Замечу, что генерация ШИМ-сигналов приемником, это отсыл к моделям, которые не имеют собственного микроконтроллера, и двигатели которых управляются непосредственно с пульта. Т.е. пульт подключается напрямую к сервомашинкам самолета, которые регулируют положение руля, подкрылков и …, я не специалист в области летательных аппаратов.
Но наши модели являются роботами, они имеют собственные микроконтроллер, который и должен обслуживать сигналы дистанционного управления. Для этого их нужно расшифровать, а конкретно в случае ШИМ сигналов нужно измерить длительность импульса в такте. Измеряем длину импульса в каждом интересующем нас канале и используем по назначению.
Простейший участок кода, отвечающий за обработку входных ШИМ последовательностей, выглядит следующим образом:
«Все листинги приведены для использования с контроллером ESP32».
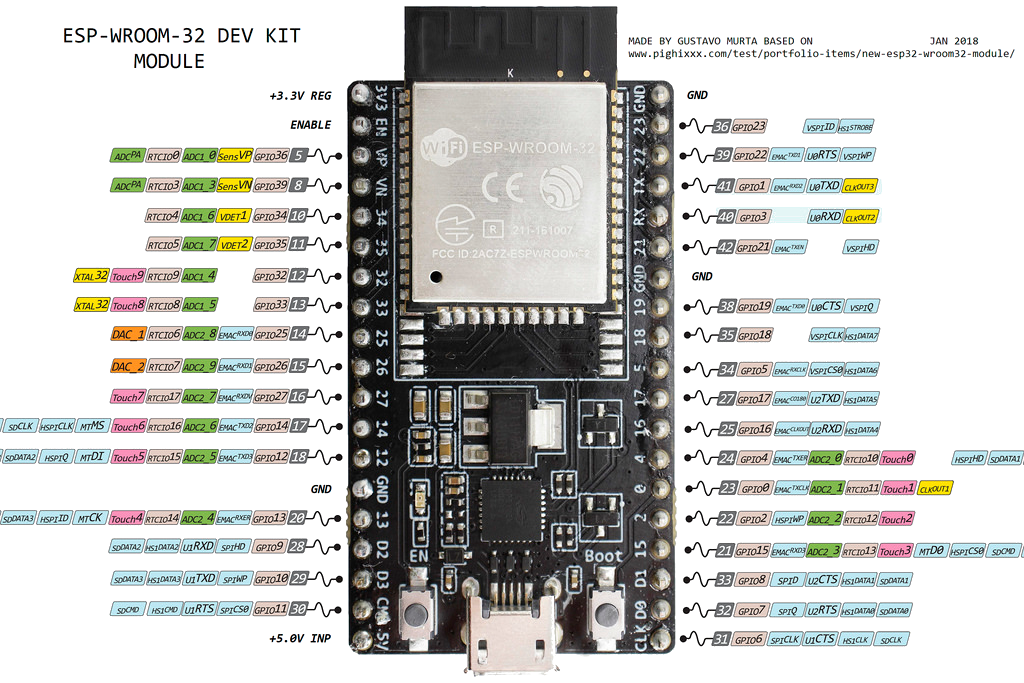
Рисунок 4
GPIO13 -> CH1
GPIO14 -> CH2
GPIO27 -> CH3
GPIO26 -> CH4
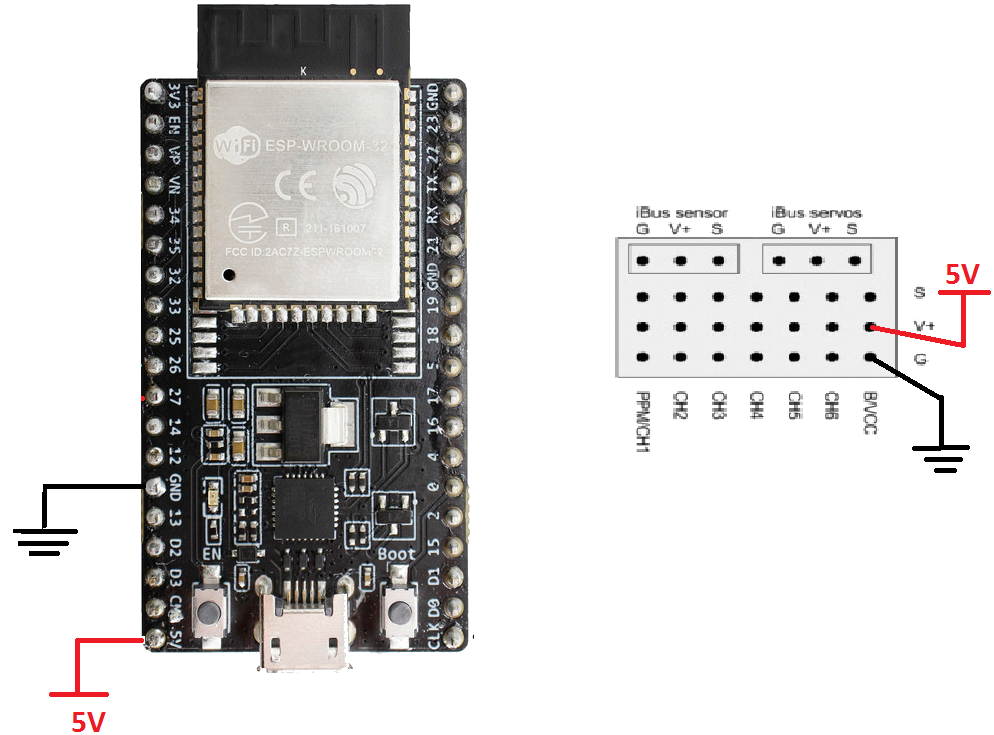
Приемник FS-iA6 и ESP32 от одного источника питания 5 вольт.
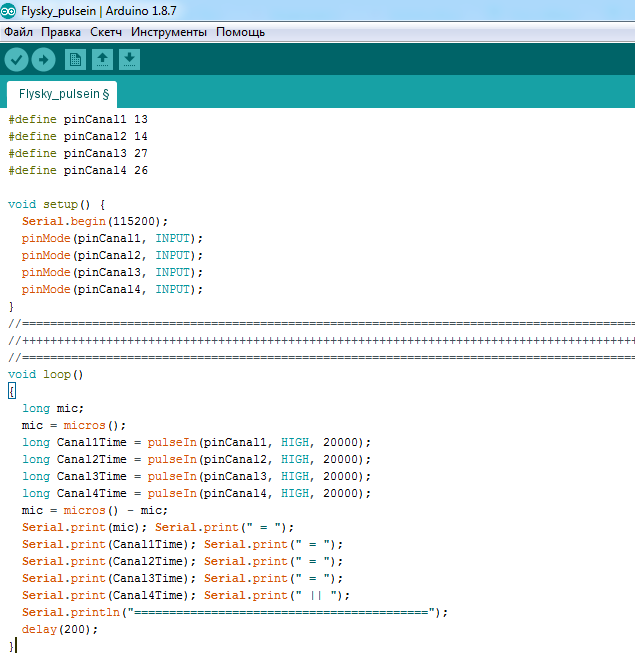
Рисунок 5
Применяя функцию pulseIn(), поочередно измеряем длину импульса, на каждом GPIO к которому подключен ШИМ канал от приемника.
pulseIn() может применяться с двумя или тремя параметрами: первый – номер GPIO, второй –тип ожидаемого сигнала , третий – максимальное время ожидания. pulseIn() измеряет длину в микросекундах импульса на GPIO.
У вышеприведенного кода есть один существенный минус –считывание всех сигналов производится последовательно и возможно в разных циклах, что приводит нас к расчету максимальной задержки, которая равна сумме времени ожидания каждого вызова pulseIn().
Давайте попробуем исследовать сигналы не по очереди, а параллельно!
ESP32 быстрый контроллер, его частота 240МГц, и сильно оптимизировать код под него не нужно, хоть это возможно.
Разработаем алгоритм параллельного опроса GPIO в цикле с дискрецией 5мкСек. Сканируем GPIO в цикле, отлавливаем сигналы и измеряем их длину. Основная программа приведена ниже, а функция сканирования расположена в файле intpilt.h , там также описание всех сопутствующих переменных и прочее.
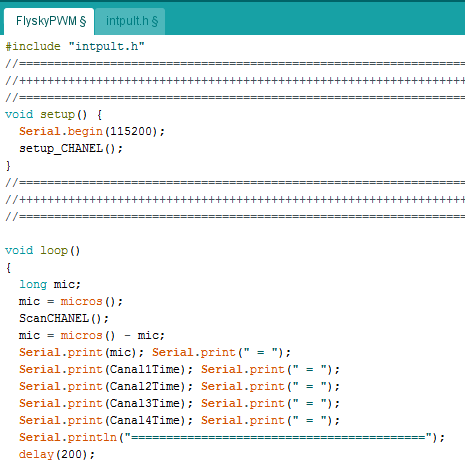
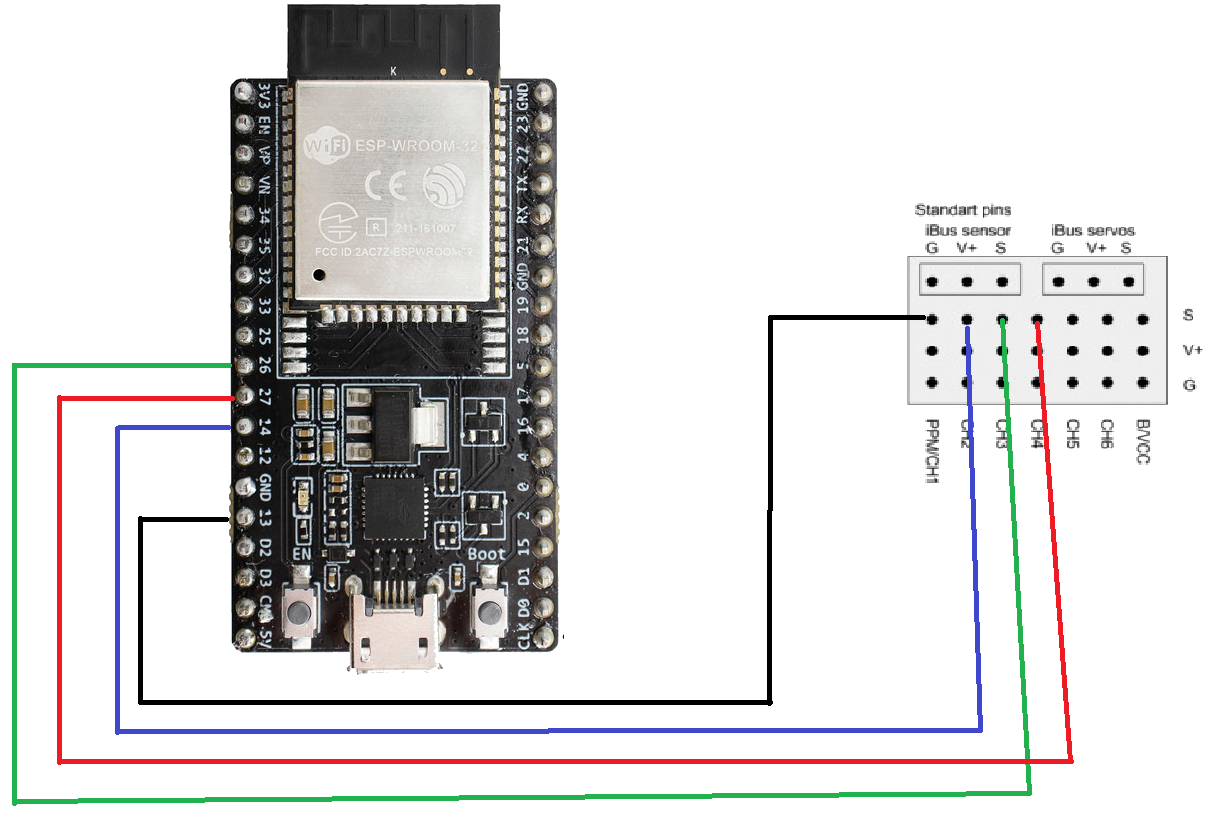
Рисунок 6
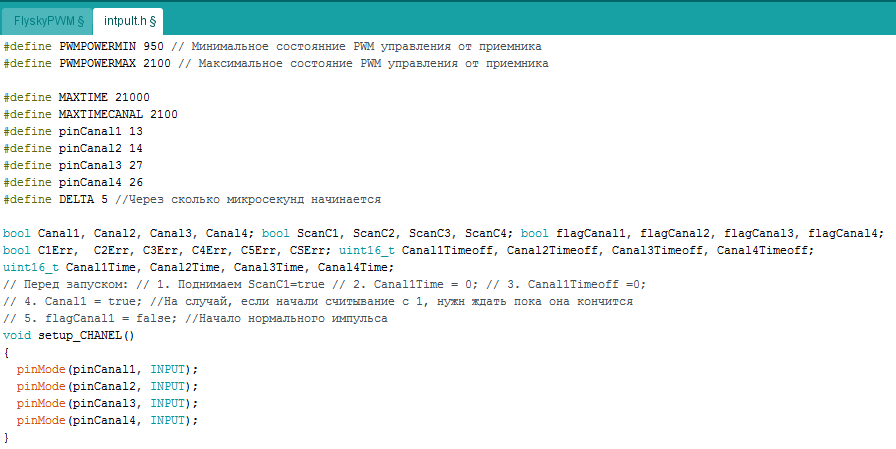
Рисунок 7
Листинг 1. Модуль intpult.h
#define PWMPOWERMIN 950 // Минимальное состоянние PWM управления от приемника
#define PWMPOWERMAX 2100 // Максимальное состояние PWM управления от приемника
#define MAXTIME 21000
#define MAXTIMECANAL 2100
#define pinCanal1 13
#define pinCanal2 14
#define pinCanal3 27
#define pinCanal4 26
#define DELTA 5 //Через сколько микросекунд начинается
bool Canal1, Canal2, Canal3, Canal4; bool ScanC1, ScanC2, ScanC3, ScanC4; bool flagCanal1, flagCanal2, flagCanal3, flagCanal4;
bool C1Err, C2Err, C3Err, C4Err, C5Err, CSErr; uint16_t Canal1Timeoff, Canal2Timeoff, Canal3Timeoff, Canal4Timeoff;
uint16_t Canal1Time, Canal2Time, Canal3Time, Canal4Time;
// Перед запуском: // 1. Поднимаем ScanC1=true // 2. Canal1Time = 0; // 3. Canal1Timeoff =0;
// 4. Canal1 = true; //На случай, если начали считывание с 1, нужн ждать пока она кончится
// 5. flagCanal1 = false; //Начало нормального импульса
void setup_CHANEL()
{
pinMode(pinCanal1, INPUT);
pinMode(pinCanal2, INPUT);
pinMode(pinCanal3, INPUT);
pinMode(pinCanal4, INPUT);
}
void ScanCHANEL()
{
uint32_t LERRUA;
ScanC1 = true; ScanC2 = true; ScanC3 = true; ScanC4 = true; Canal1Time = 0; Canal2Time = 0; Canal3Time = 0; Canal4Time = 0;
Canal1Timeoff = 0; Canal2Timeoff = 0; Canal3Timeoff = 0; Canal4Timeoff = 0; Canal1 = true; Canal2 = true; Canal3 = true; Canal4 = true;
flagCanal1 = false; flagCanal2 = false; flagCanal3 = false; flagCanal4 = false; C1Err = false; C2Err = false; C3Err = false; C4Err = false;
unsigned long tt, tectime, end_time;
tectime = micros();
end_time = tectime + MAXTIME + DELTA;
while ((tectime < end_time) && (ScanC1 || ScanC2 || ScanC3 || ScanC4 ))
{
//====== C1
if (ScanC1) //Если поднято считывание с канала
{
if (flagCanal1) // Если поднят расчет длины импульса
{
Canal1 = digitalRead(pinCanal1);
if (Canal1) {
Canal1Time += DELTA;
if (Canal1Time > MAXTIMECANAL) {
C1Err = true;
ScanC1 = false;
}
}
else {
ScanC1 = false;
}
}
else //Если не поднят флаг расчет длины импульса
{
if (Canal1) //Если в канале 1, то мы в начале
{
Canal1 = digitalRead(pinCanal1);
}
else
{
Canal1 = digitalRead(pinCanal1);
if (Canal1)
{
Canal1Time = DELTA;
flagCanal1 = true;
}
else
{
Canal1Timeoff += DELTA; if (Canal1Timeoff > MAXTIME) ScanC1 = false; //Завершили
}
}
}
}
//============= C2
if (ScanC2) //Если поднято считывание с канала
{
if (flagCanal2) // Если поднят расчет длины импульса
{
Canal2 = digitalRead(pinCanal2);
if (Canal2) {
Canal2Time += DELTA;
if (Canal2Time > MAXTIMECANAL)
{
C2Err = true;
ScanC2 = false;
}
}
else
{
ScanC2 = false;
}
}
else //Если не поднят флаг расчет длины импульса
{
if (Canal2) //Если в канале 1, то мы в начале
{
Canal2 = digitalRead(pinCanal2);
}
else
{
Canal2 = digitalRead(pinCanal2);
if (Canal2)
{
Canal2Time = DELTA;
flagCanal2 = true;
}
else
{
Canal2Timeoff += DELTA; if (Canal2Timeoff > MAXTIME) ScanC2 = false; //Завершили
}
}
}
}
//===== C3
if (ScanC3) //Если поднято считывание с канала
{
if (flagCanal3) // Если поднят расчет длины импульса
{
Canal3 = digitalRead(pinCanal3);
if (Canal3) {
Canal3Time += DELTA;
if (Canal3Time > MAXTIMECANAL)
{
C3Err = true;
ScanC3 = false;
}
}
else
{
ScanC3 = false;
}
}
else //Если не поднят флаг расчет длины импульса
{
if (Canal3) //Если в канале 1, то мы в начале
{
Canal3 = digitalRead(pinCanal3);
}
else
{
Canal3 = digitalRead(pinCanal3);
if (Canal3)
{
Canal3Time = DELTA;
flagCanal3 = true;
}
else
{
Canal3Timeoff += DELTA; if (Canal3Timeoff > MAXTIME) ScanC3 = false; //Завершили
}
}
}
}
//===== C4
if (ScanC4) //Если поднято считывание с канала
{
if (flagCanal4) // Если поднят расчет длины импульса
{
Canal4 = digitalRead(pinCanal4);
if (Canal4) {
Canal4Time += DELTA;
if (Canal4Time > MAXTIMECANAL)
{
C4Err = true;
ScanC4 = false;
}
}
else
{
ScanC4 = false;
}
}
else //Если не поднят флаг расчет длины импульса
{
if (Canal4) //Если в канале 1, то мы в начале
{
Canal4 = digitalRead(pinCanal4);
}
else
{
Canal4 = digitalRead(pinCanal4);
if (Canal4)
{
Canal4Time = DELTA;
flagCanal4 = true;
}
else
{
Canal4Timeoff += DELTA; if (Canal4Timeoff > MAXTIME) ScanC4 = false; //Завершили
}
}
}
}
tt = micros();
while (tt < tectime) tt = micros();
tectime = tt + DELTA;
}
}
Теперь блок сканирования будет выполняться за время равное длине одного такта, 21 миллисекунд в нашем случае. Время уменьшено в 4 раза для 4х каналов, для 6 каналов, будет 6 раз соответственно.
Но, по-моему, все равно время велико!
Тратить 21 миллисекунду впустую тогда, когда наш контроллер мог бы производить полезные вычисления траектории робота или сканировать датчики, поэтому перейдем к рассмотрению приемника FS-iA6B.
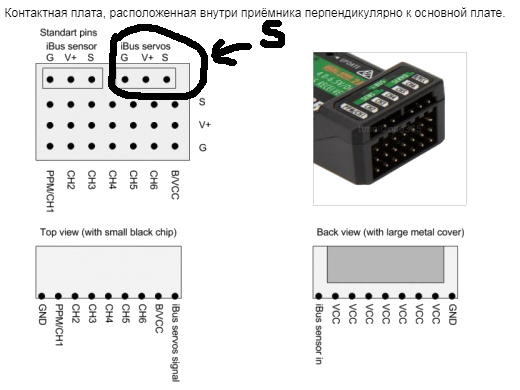
Рисунок 8
Все дело в том, что он имеет последовательный порт передачи данных на скорости 115200
И тут нам на помощь приходит одна замечательная библиотека flyskyIBus (https://github.com/aanon4/FlySkyIBus ).
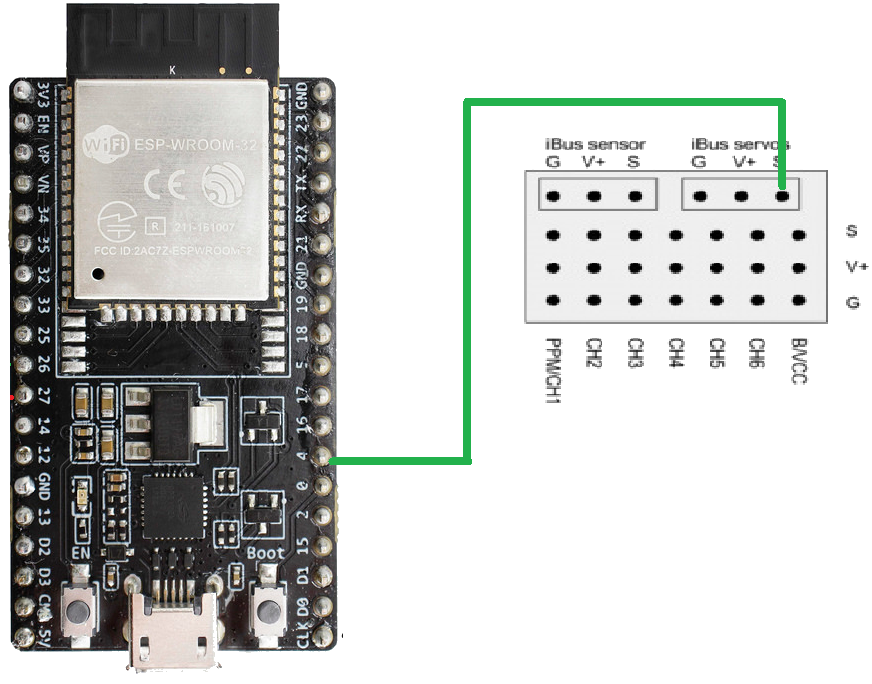
Скачиваем, подключаем GPIO4 подключаем к iBus Servos контакт S, настраиваем под особенности ESP32 см.ниже:
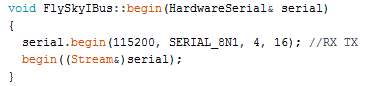
А именно – добавляем адресные GPIO
Вот ка выглядит теперь основная программа:
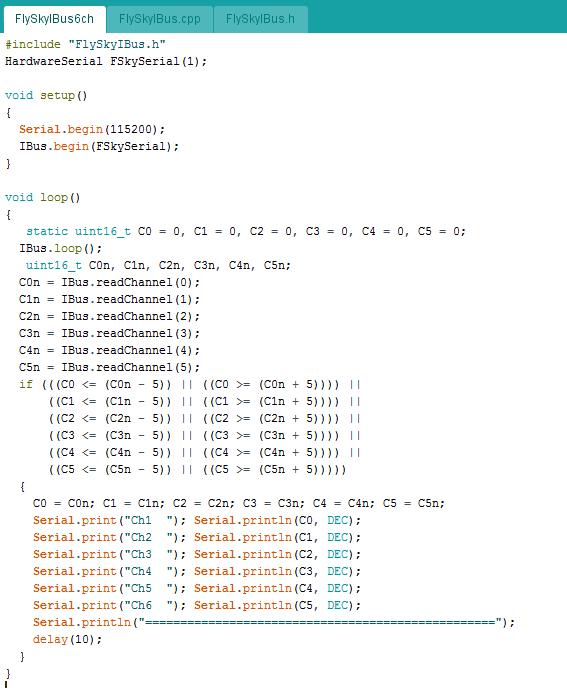
Рисунок 9
Обрабатываем входной буфер порта ввода/вывода IBus.loop() , записываем данные о состоянии рычажков передатчика в переменные и всё. Соединение использует только один GPIO (вывод нами не используется), прием данных в буфер порта проходит на аппаратном уровне и может не задерживать выполнение программы.
Вот так, затратив только одну GPIO контроллера ESP32, мы подключили приемник, причем у меня он передает на контроллер 10 значений состояния рычажков управления, а может 14, где взять еще 4 рычажка?
Все примеры прикреплены к статье.
X