Dep-courses
- РЕГИСТРАЦИЯ
- ВОЙТИ
- НОВОСТИ
- ЭКСПЕРТЫ
- НАПРАВЛЕНИЯ
- СОРЕВНОВАНИЯ
- РЕЕСТР
- ГЛАВНАЯ
- — РЕГИСТРАЦИЯ
- — ВОЙТИ
- — НОВОСТИ
- — 3D-МОДЕЛИРОВАНИЕ
- — ГРАФИЧЕСКИЙ ДИЗАЙН
- — ПРОГРАММИРОВАНИЕ
- — ЭЛЕКТРОНИКА
- — РОБОТОТЕХНИКА
- СОРЕВНОВАНИЯ
- РЕЕСТР
E-mail
Dep-courses@ya.ru
LEGO MINDSTORMS EV3 семь инструкций по сборке.
Конвеер-сортировщик шариков
Робот сортирует шарики по двум корзинам.
СКАЧАТЬ ИНСТРУКЦИЮ
Вездеход
Робот на гусеницах
СКАЧАТЬ ИНСТРУКЦИЮ
Машина с пониженной передачей
В конструкции используется передача для увеличения силы
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-чертежник
Робот рисует разметку
СКАЧАТЬ ИНСТРУКЦИЮ
Робот манипулятор
Робот позволяет перемещать объекты в ограниченном пространстве.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-бот
Простой бот для программирования передвижения.
СКАЧАТЬ ИНСТРУКЦИЮ
Робот-сортировщик
Робот программируется при помощи цветных квадратиков
СКАЧАТЬ ИНСТРУКЦИЮ
Политика в отношении обработки персональных данных
Язык программирования: EV3-G
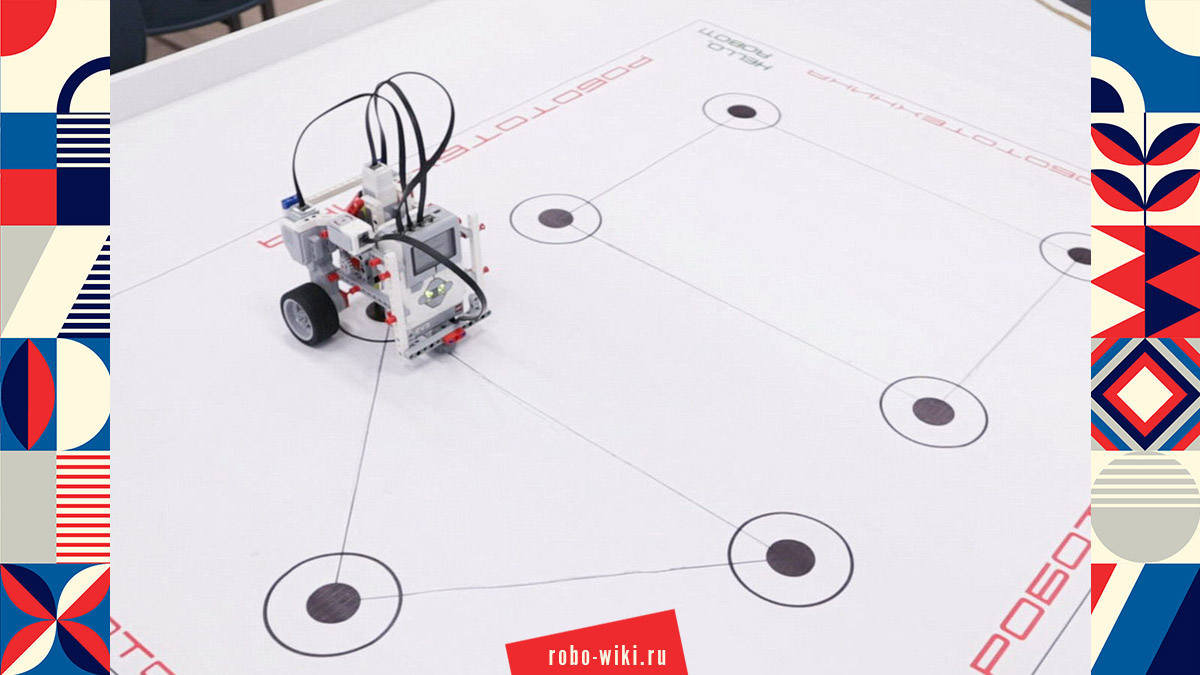
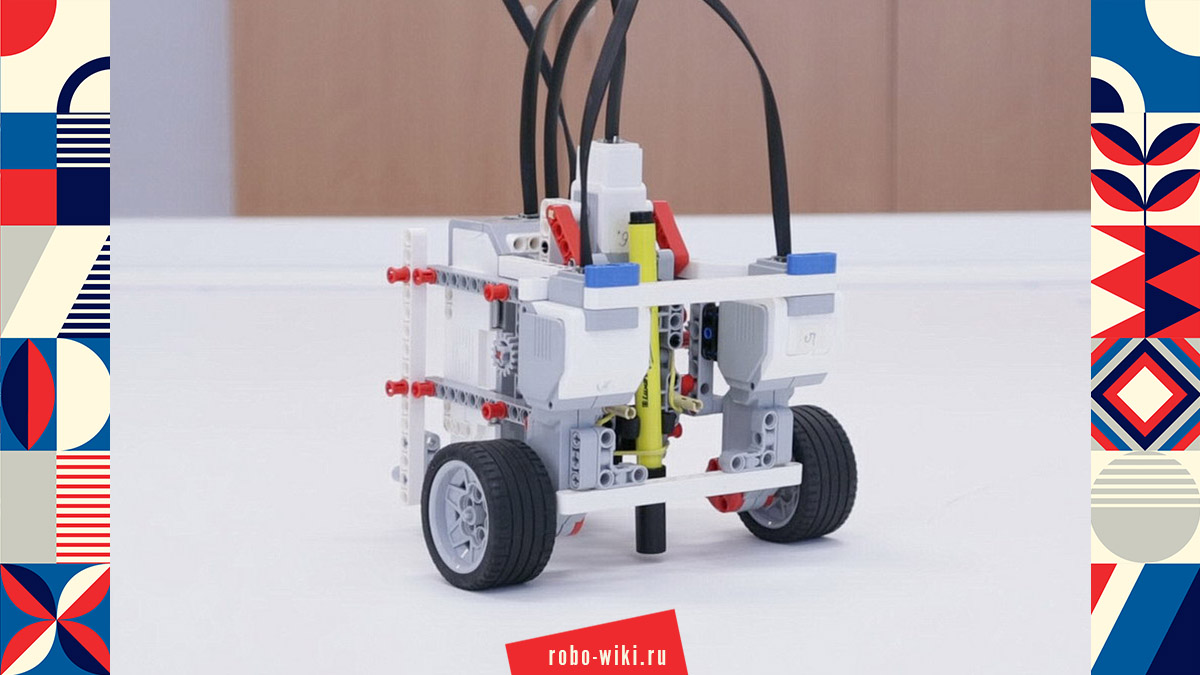
Робот — чертежник на базе Lego Mindstorms Education EV3 — популярный исполнитель алгоритмов, собранный из образовательного конструктора. С помощью чертежника можно подготовиться к соревнованию, изучить работу гироскопического датчика, научиться точным перемещениям и перемещениям по гироскопу. Можно нарисовать массу геометрических фигур, зашифровать текст азбукой Морзе и нарисовать звезду для новогодней елки.
Фото:


Оборудование: базовый набор Lego Mindstorms Education EV3, канцелярская резинка, фломастер (маркер) на водной основе, поле для чертежника из баннерной ткани, желателен ПЭТ-лист или лист из оргстекла поверх поля из баннерной ткани, влажная тряпка.
Механизмы: зубчатая передача.
Модель: РЧ-В1– робот-чертежник, вариант 1.
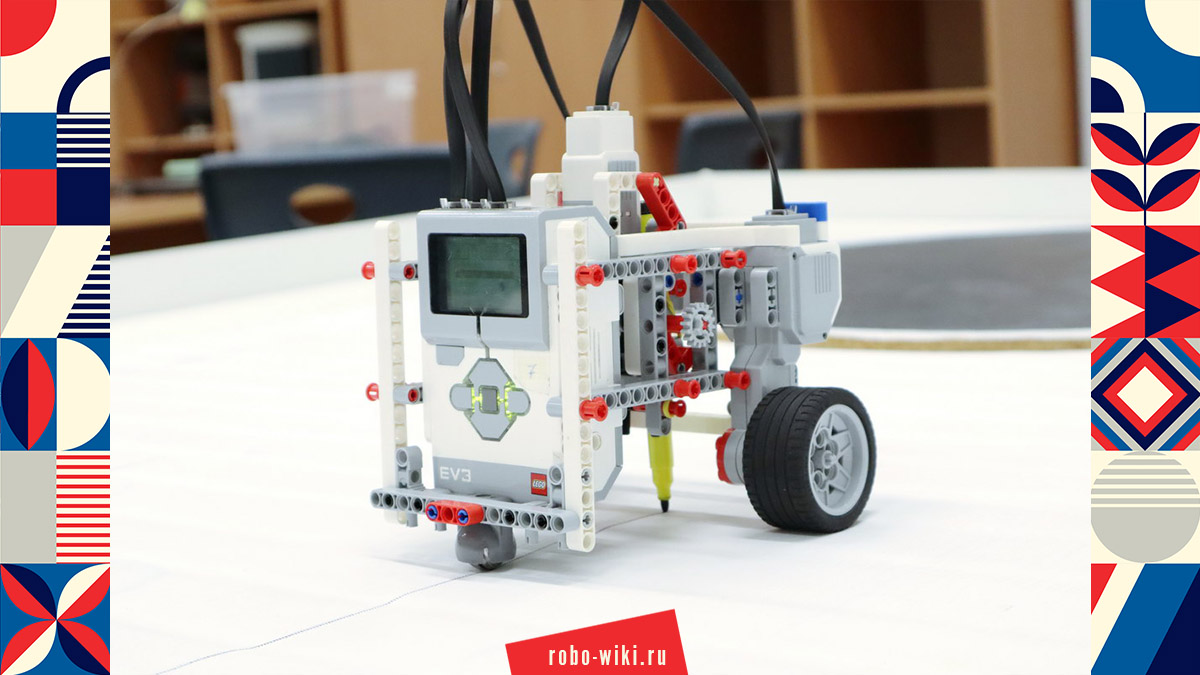
Описание. Робот-чертежник построен на базе конструктора Lego EV3 и предназначен для построения разных рисунков и чертежей на ровной поверхности с помощью маркера (фломастера).
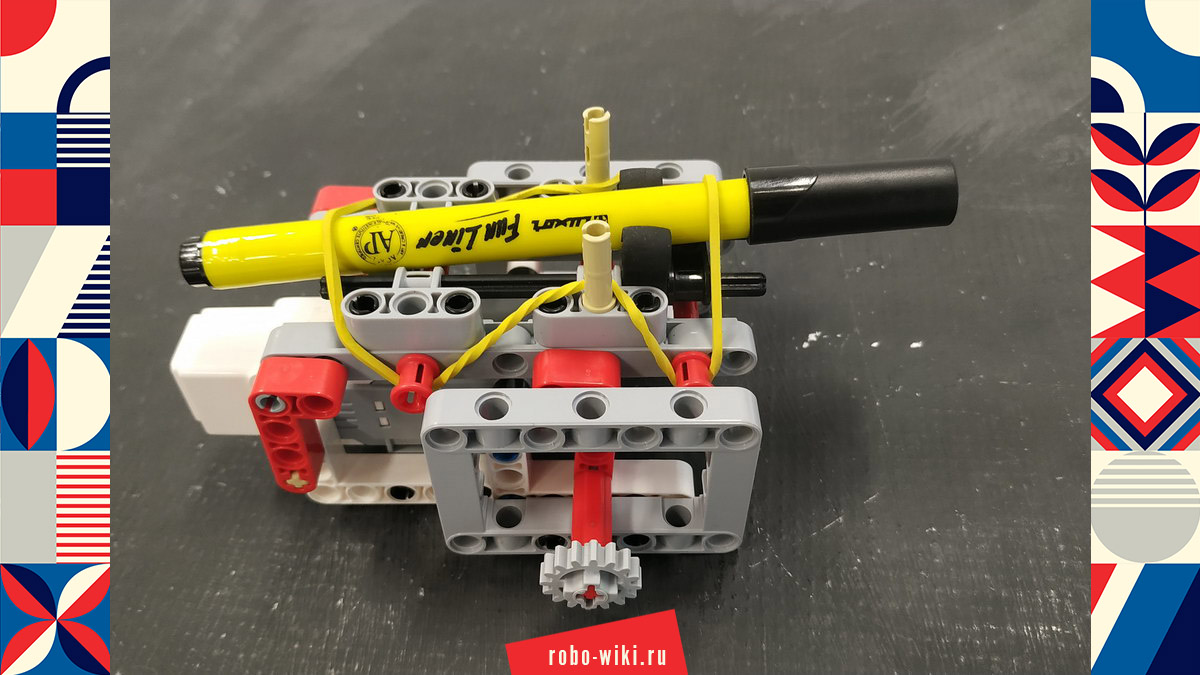
Чертежник имеет механизм опускания/подъема маркера на среднем моторе EV3. Маркер надежно фиксируется в механизме с помощью канцелярской резинки. Положение наконечника маркера можно настроить так, чтобы его кончик в нижнем положении совпадал с осью вращения робота.
Можно использовать два способа программирования поворотов. Первый – указать точное значение в градусах или оборотах в соответствующем блоке для поворота на заданный угол. Второй – подключить гироскопический датчик (гироскоп) и производить поворот по его показаниям.
Задачи:
- Собери модель робота-чертежника по инструкции.
- Подключи гироскоп, если требуется выполнить задания с помощью гироскопического датчика.
- Выполни предложенные задания.
Примеры страниц:

Для подписчиков (старый способ)
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Аккаунт доступа «Lego EV3 (архивный способ оплаты)»
LegoEV3 12 мес.
1301
Архивный способ оплаты. Скачать инструкции можно на сайте market.robo-wiki.ru
( 2 оценки, среднее 5 из 5 )
Лего- конструирование
Кириллов Роман Александрович

Роботы в нашей жизни
Промышленные роботы
Космические роботы
Военные роботы
Нанороботы
Роботы-хирурги
Роботы -охранники
Экзоскелеты
Роботы для игр

robo-wiki.ru
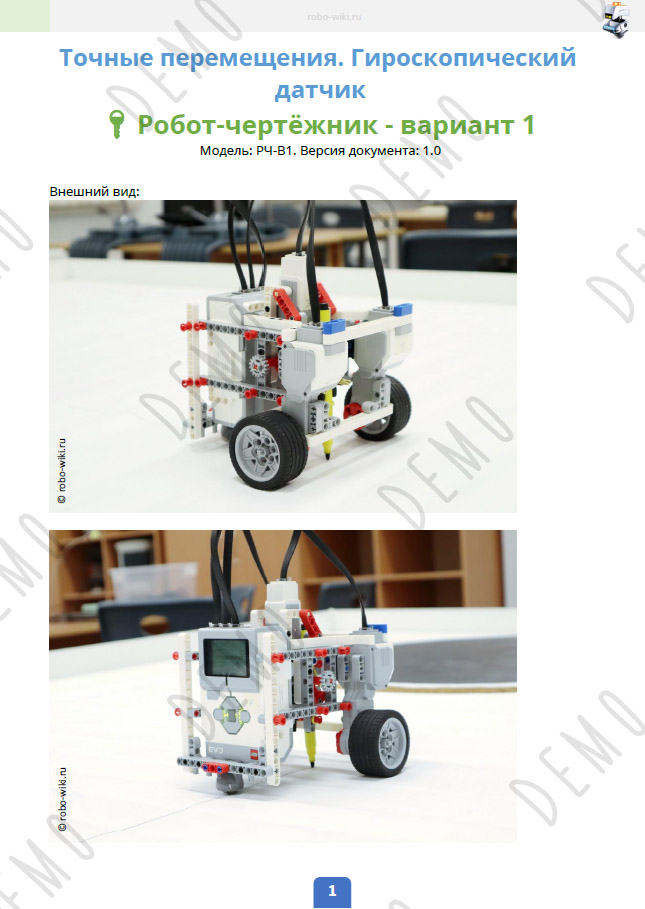
Точные перемещения. Гироскопический датчик
Робот-чертёжник

Оборудование: базовый набор Lego Mindstorms Education EV3, канцелярская
резинка, фломастер (маркер) на водной основе, поле для чертежника из баннерной ткани, желателен ПЭТ-лист или лист из оргстекла поверх поля из баннерной ткани, влажная тряпка.
Механизмы: зубчатая передача.
Модель: РЧ-В1– робот-чертежник.
Описание.
Робот-чертежник построен на базе конструктора Lego EV3 и предназначен для построения разных рисунков и чертежей на ровной поверхности с помощью маркера (фломастера).
Чертежник имеет механизм опускания/подъема маркера на среднем моторе EV3. Маркер надежно фиксируется в механизме с помощью канцелярской резинки. Положение наконечника маркера можно настроить так, чтобы его кончик в нижнем положении совпадал с осью вращения робота.
Можно использовать два способа программирования поворотов чертежника. Первый – указать точное значение в градусах или оборотах в соответствующем блоке для поворота на заданный угол. Второй – подключить гироскопический датчик (гироскоп) и производить поворот по его показаниям.

robo-wiki.ru
Часть 1. Сборка механизма для опускания/подъема маркера
1
Для опускания и подъема маркера будем использовать средний мотор EV3
Закрепи две Т-балки
2
x1
x2
x1 z12
x4
x1
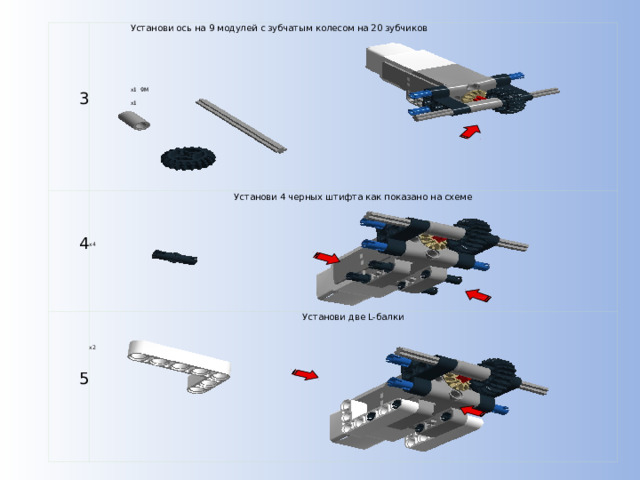
Установи ось на 9 модулей с зубчатым колесом на 20 зубчиков
3
Установи 4 черных штифта как показано на схеме
4
5
Установи две L-балки
x1 9M
x1
x4
x1 z20
x2
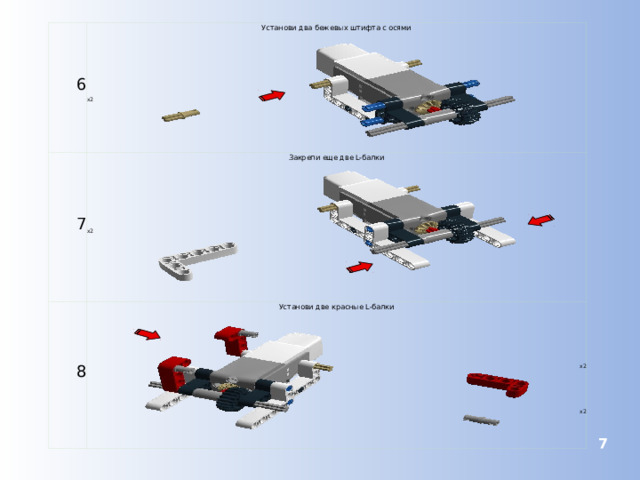
6
Установи два бежевых штифта с осями
7
Закрепи еще две L-балки
8
Установи две красные L-балки
x2
x2
x2
x2
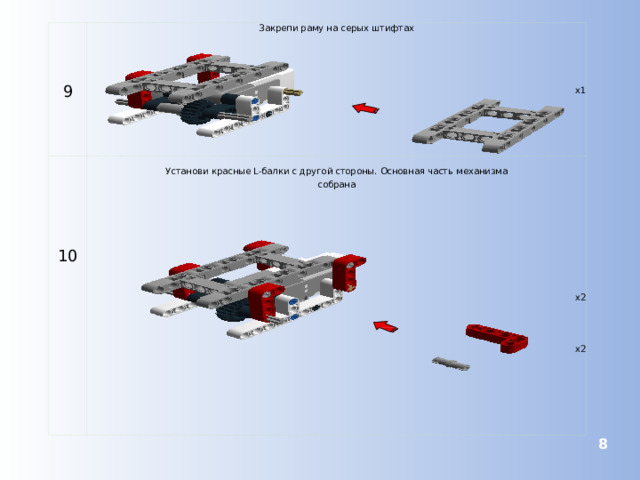
9
Закрепи раму на серых штифтах
10
Установи красные L-балки с другой стороны. Основная часть механизма
собрана
x1
x2
x2
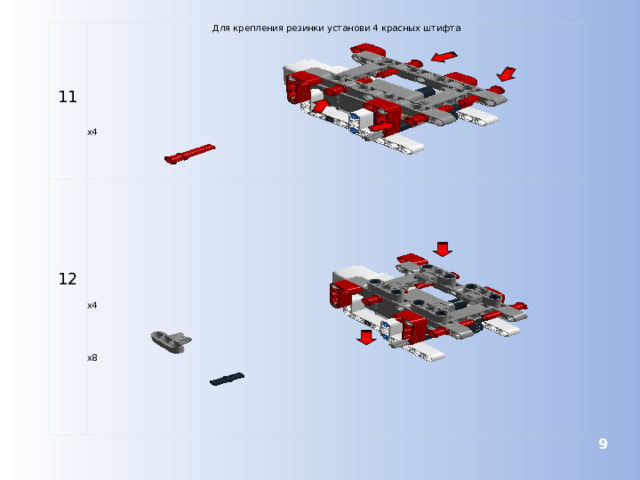
Для крепления резинки установи 4 красных штифта
11
12
x4
x4
x8
robo-wiki.ru
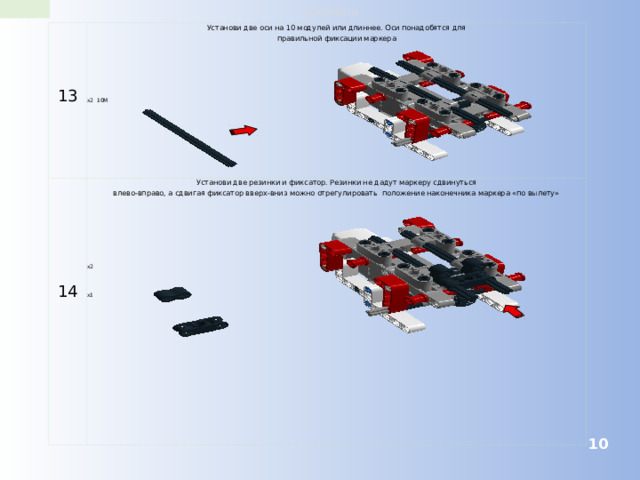
13
Установи две оси на 10 модулей или длиннее. Оси понадобятся для
правильной фиксации маркера
Установи две резинки и фиксатор. Резинки не дадут маркеру сдвинуться
влево-вправо, а сдвигая фиксатор вверх-вниз можно отрегулировать положение наконечника маркера «по вылету»
14
x2 10M
x2
x1
robo-wiki.ru
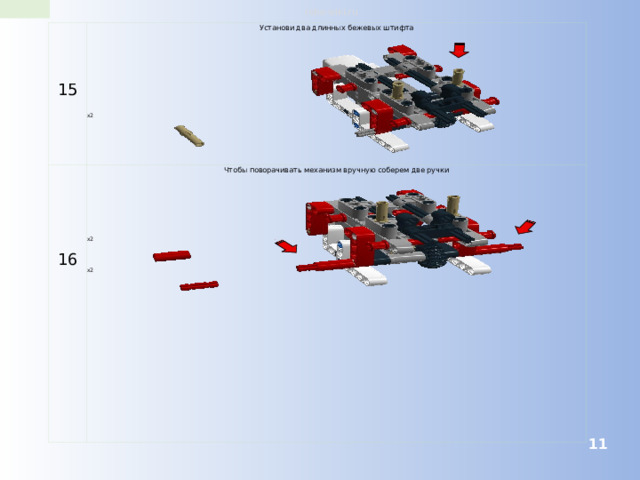
15
Установи два длинных бежевых штифта
16
Чтобы поворачивать механизм вручную соберем две ручки
x2
x2
x2
robo-wiki.ru
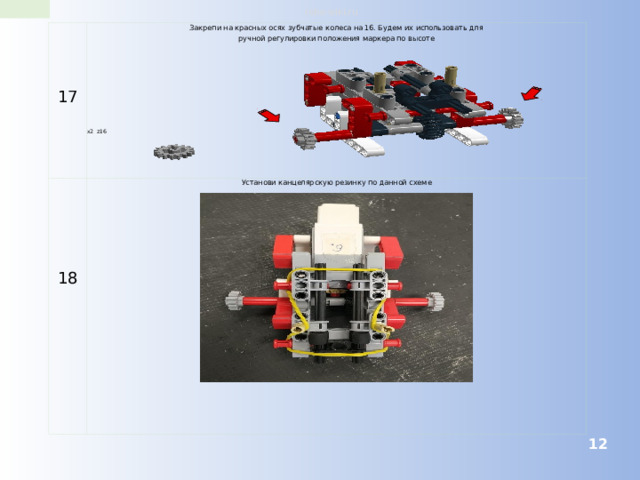
17
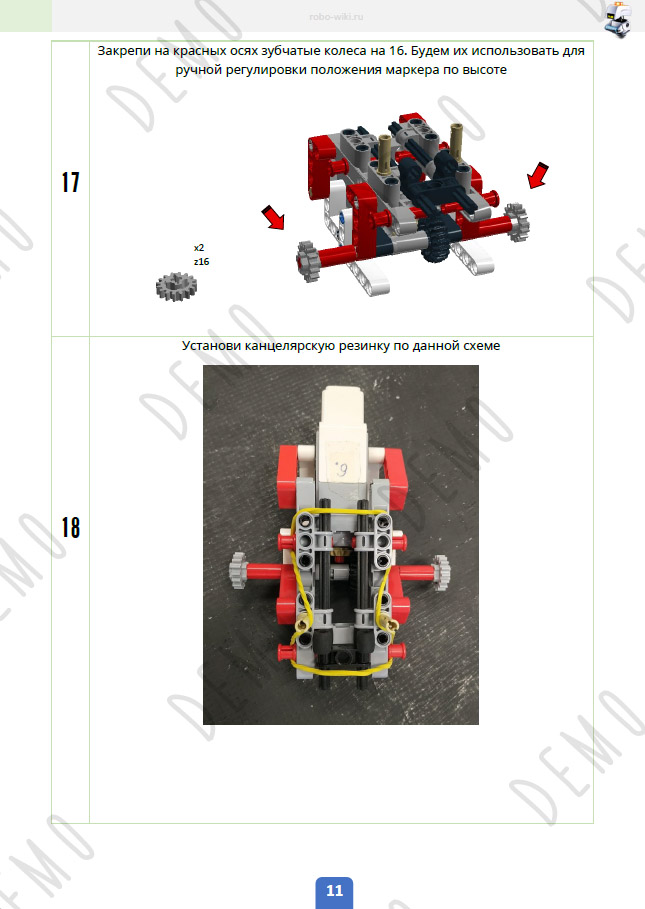
Закрепи на красных осях зубчатые колеса на 16. Будем их использовать для
ручной регулировки положения маркера по высоте
18
Установи канцелярскую резинку по данной схеме
x2 z16
robo-wiki.ru
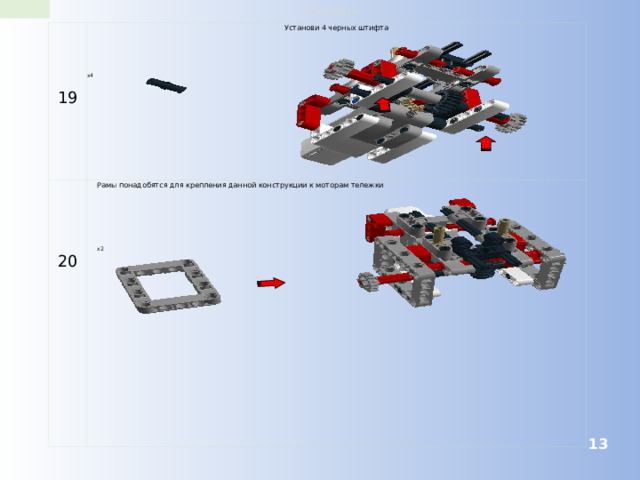
19
Установи 4 черных штифта
Рамы понадобятся для крепления данной конструкции к моторам тележки
20
x4
x2

robo-wiki.ru
21
Закрепи маркер (фломастер) на водной основе, используя эту схему.
Перманентные маркеры использовать нельзя!
Колпачок пока не снимай!
robo-wiki.ru
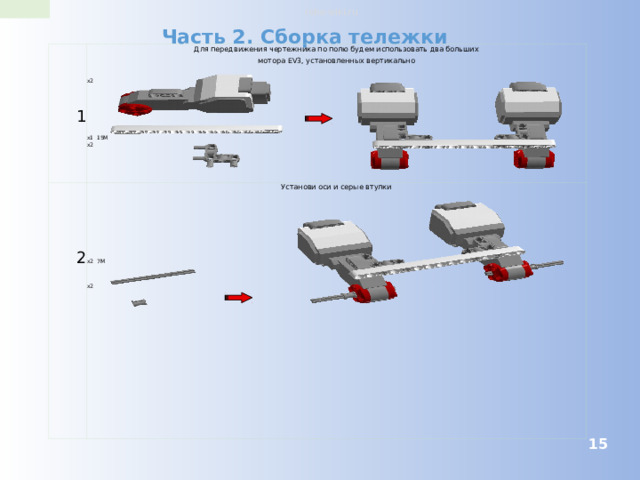
Часть 2. Сборка тележки
1
Для передвижения чертежника по полю будем использовать два больших
мотора EV3, установленных вертикально
Установи оси и серые втулки
2
x2
x2 7M
x1 15M
x2
x2
robo-wiki.ru
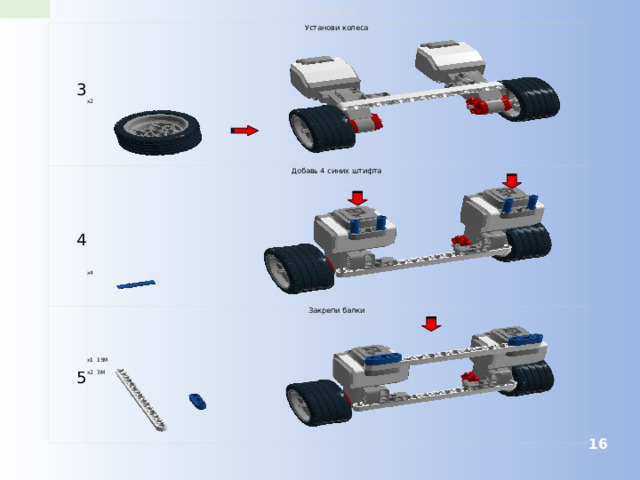
3
Установи колеса
4
Добавь 4 синих штифта
5
Закрепи балки
x2
x4
x1 15M
x2 3M
robo-wiki.ru
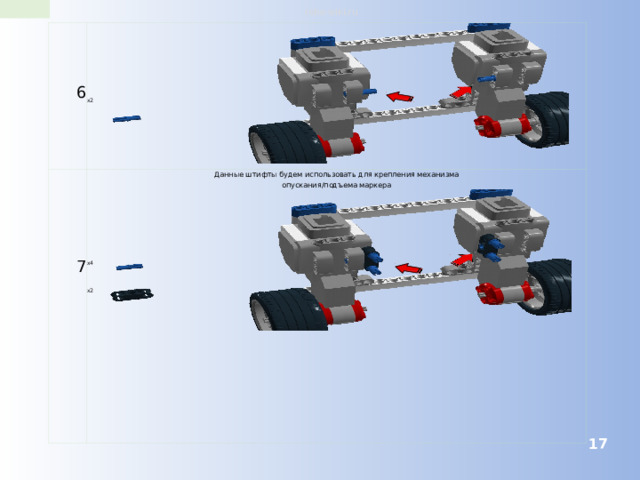
6
x2
7
Данные штифты будем использовать для крепления механизма
опускания/подъема маркера
x4
x2
robo-wiki.ru
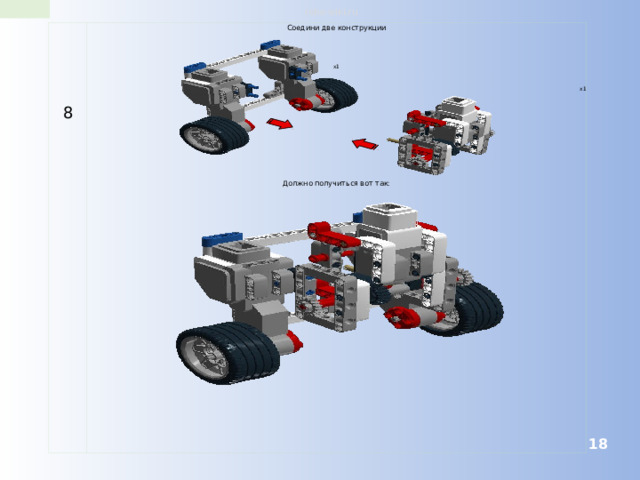
8
Соедини две конструкции
x1
x1
Должно получиться вот так:
robo-wiki.ru
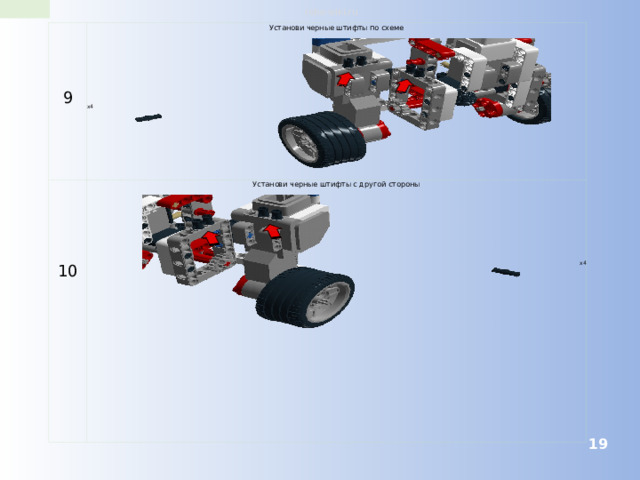
9
Установи черные штифты по схеме
10
Установи черные штифты с другой стороны
x4
x4
robo-wiki.ru
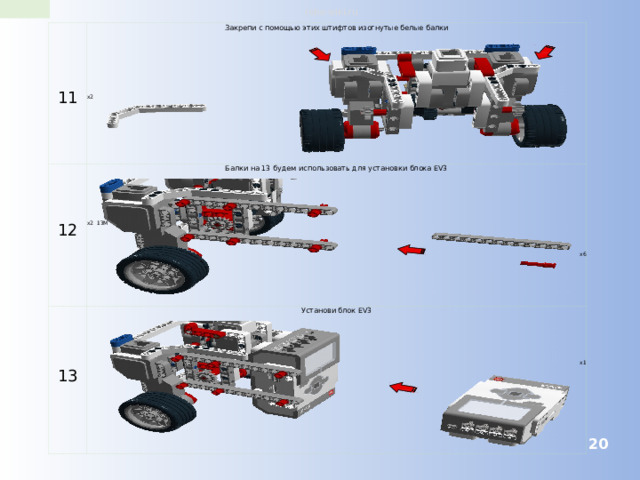
11
Закрепи с помощью этих штифтов изогнутые белые балки
12
Балки на 13 будем использовать для установки блока EV3
13
Установи блок EV3
x2
x2 13M
x1
x6
robo-wiki.ru
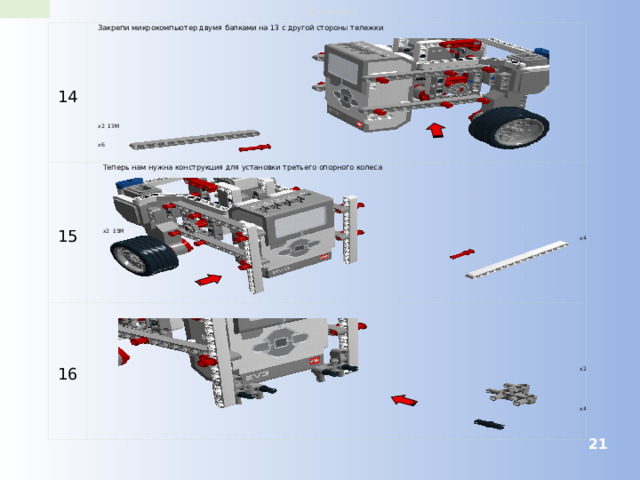
14
Закрепи микрокомпьютер двумя балками на 13 с другой стороны тележки
Теперь нам нужна конструкция для установки третьего опорного колеса
15
16
x2 13M
x2
x2 15M
x4
x6
x4
robo-wiki.ru
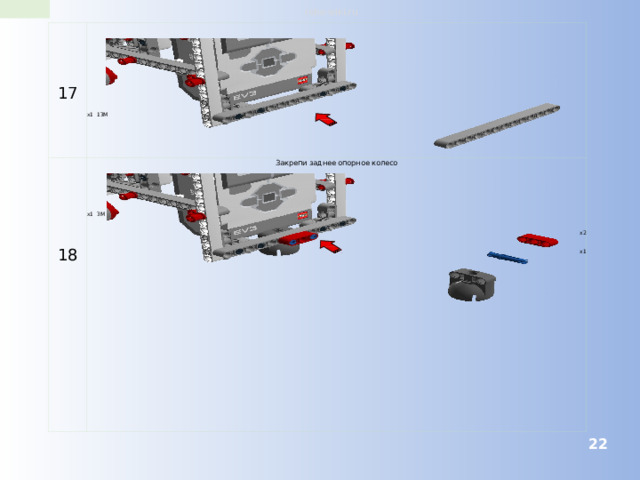
17
x1 13M
18
Закрепи заднее опорное колесо
x1 3M
x2
x1
robo-wiki.ru
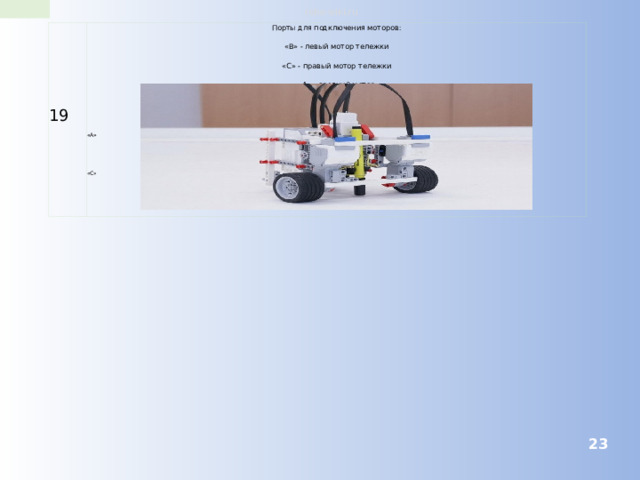
19
Порты для подключения моторов:
«B» — левый мотор тележки
«С» — правый мотор тележки
«А» — средний мотор
«A»
«C» «B»

robo-wiki.ru
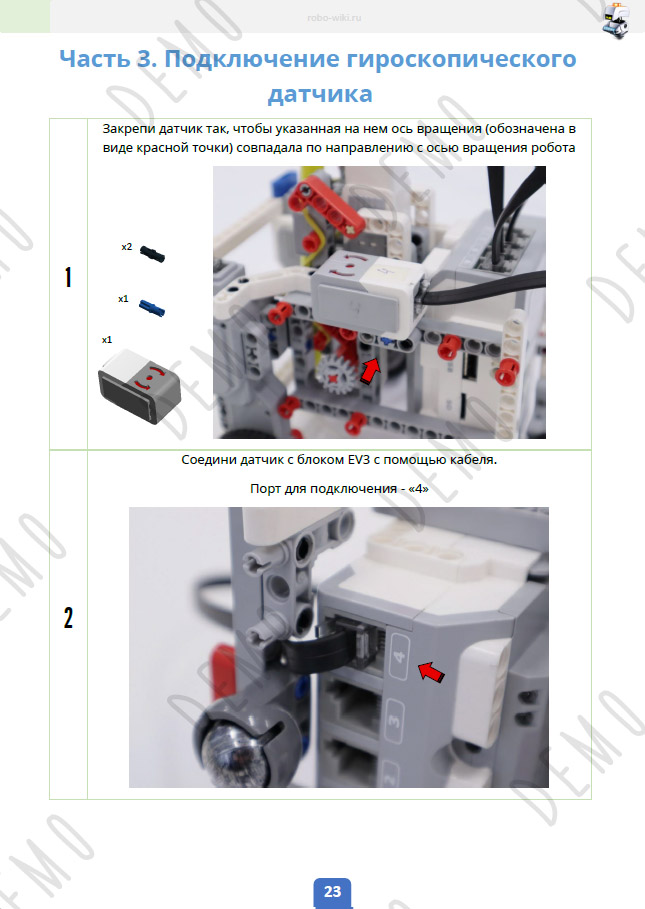
Часть 3. Подключение гироскопического датчика
Закрепи датчик так, чтобы указанная на нем ось вращения (обозначена в
виде красной точки) совпадала по направлению с осью вращения робота
1
2
Соедини датчик с блоком EV3 с помощью кабеля.
Порт для подключения — «4»
x2
x1
x1

robo-wiki.ru
Часть 4. Задачи
Задача №1. Начерти квадрат, используя цикл. После запуска программы и перед началом движения робот ждет 1 секунду. Побеждает та команда, чья фигура ближе к идеальному квадрату.
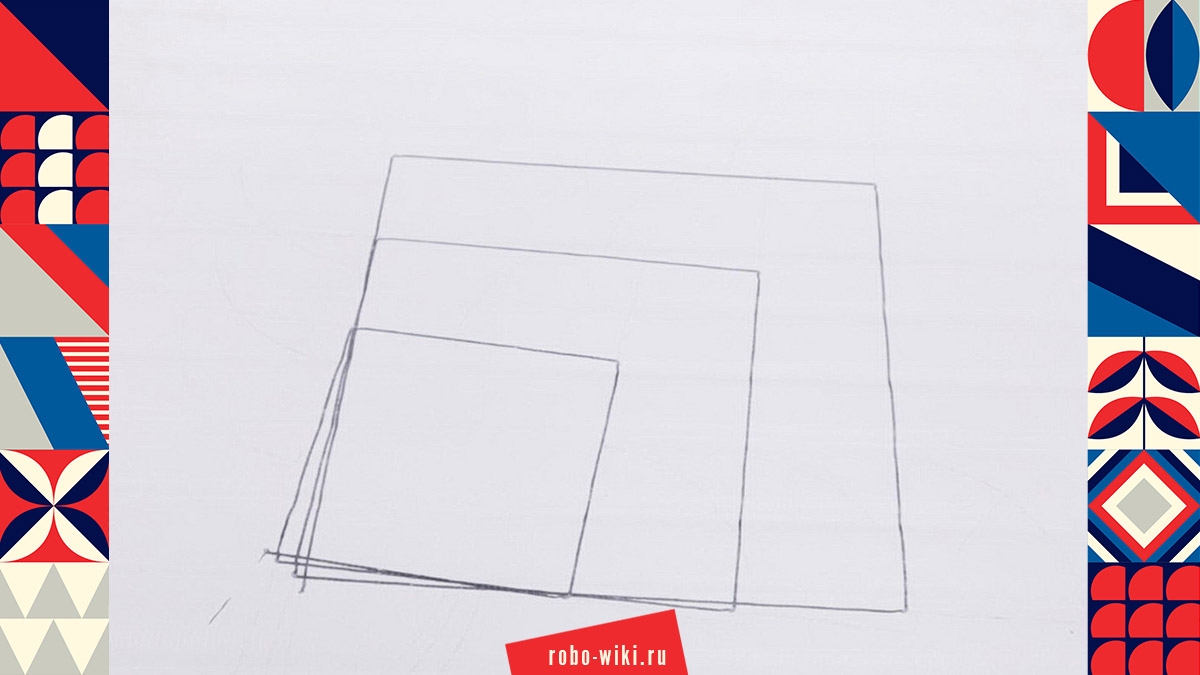
Задача №2. Начерти три вложенных квадрата по данной схеме. После запуска программы и перед началом движения робот ждет 1 секунду.
Изменить алгоритм на свое усмотрение (изменяя параметры движения вперед и изменяя угол поворота, и зациклив робота на бесконечное число повторений тела цикла) и посмотреть какие фигуры будет рисовать робот
robo-wiki.ru
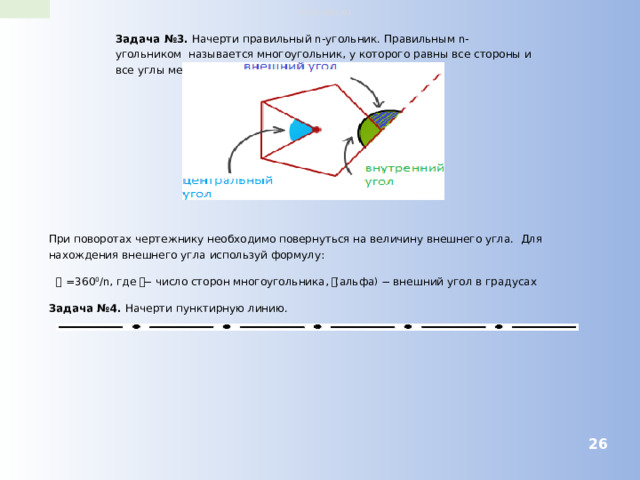
Задача №3. Начерти правильный n-угольник. Правильным n-угольником называется многоугольник, у которого равны все стороны и все углы между смежными сторонами.
При поворотах чертежнику необходимо повернуться на величину внешнего угла. Для нахождения внешнего угла используй формулу:
𝜶 =360 0 /n , где 𝒏 − число сторон многоугольника, 𝜶 ( альфа ) − внешний угол в градусах
Задача №4. Начерти пунктирную линию.
robo-wiki.ru
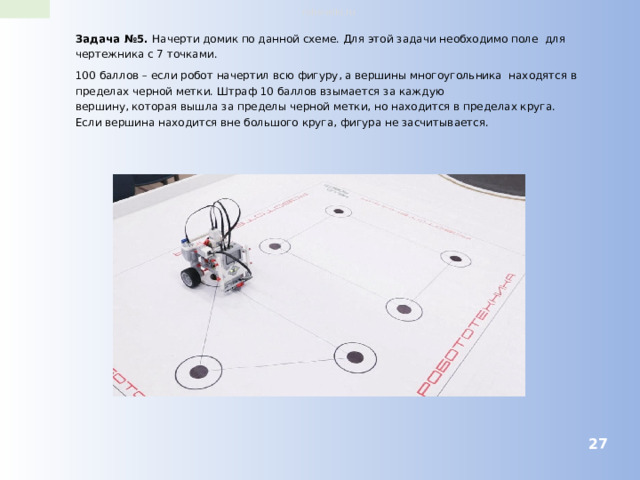
Задача №5. Начерти домик по данной схеме. Для этой задачи необходимо поле для чертежника с 7 точками.
100 баллов – если робот начертил всю фигуру, а вершины многоугольника находятся в пределах черной метки. Штраф 10 баллов взымается за каждую
вершину, которая вышла за пределы черной метки, но находится в пределах круга. Если вершина находится вне большого круга, фигура не засчитывается.
 = 90 (угол подбирается экспериментально). Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания. Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием . » width=»640″
= 90 (угол подбирается экспериментально). Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания. Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием . » width=»640″
robo-wiki.ru
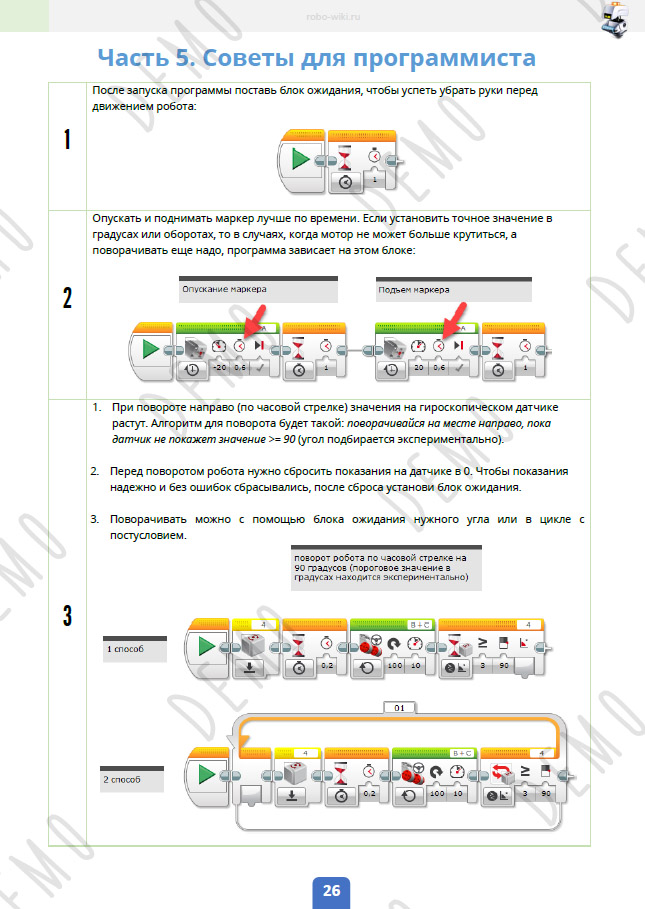
Часть 5. Советы программисту
1
После запуска программы установи блок ожидания, чтобы успеть убрать руку перед
началом движения робота:
2
Опускать и поднимать маркер лучше по времени. Если установить точное значение в
градусах или оборотах, то в случаях, когда мотор не может больше крутиться, а поворачивать еще надо, программа зависает на этом блоке.
3
- При повороте направо (по часовой стрелке) значения на гироскопическом датчике
растут. Алгоритм для поворота будет такой: поворачивайся на месте направо, пока датчик не покажет значение = 90 (угол подбирается экспериментально).
- Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания.
- Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием .
robo-wiki.ru
4
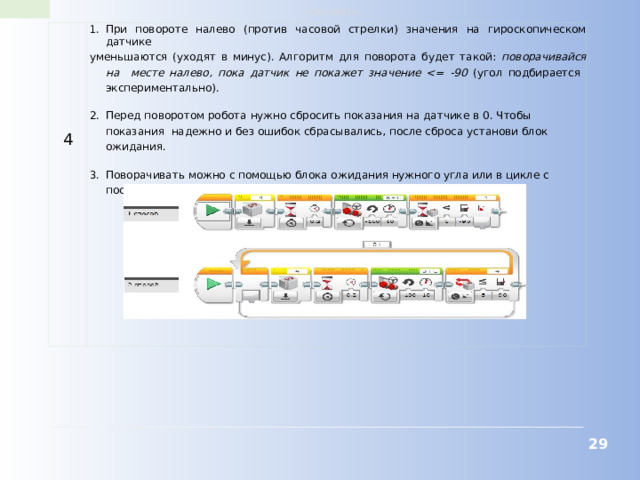
- При повороте налево (против часовой стрелки) значения на гироскопическом датчике
уменьшаются (уходят в минус). Алгоритм для поворота будет такой: поворачивайся на месте налево, пока датчик не покажет значение (угол подбирается экспериментально).
- Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания.
- Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием.
Спасибо за внимание!
Улыбнитесь!
Комплектация 45544 Mindstorms EV3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Комплектация 45560 Mindstorms EV3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Владелец скрыт
4 мар. 2019 г.
1,3 МБ
Владелец скрыт
4 мар. 2019 г.
9 МБ
ev3-cuboid-dc93b2e60bed2981e76b3bac9ea04558.pdf
Владелец скрыт
4 мар. 2019 г.
780 КБ
ev3-rem-color-sensor-down-driving-base-d30ed30610c3d6647d56e17bc64cf6e2.pdf
Владелец скрыт
4 мар. 2019 г.
1,3 МБ
ev3-rem-driving-base-79bebfc16bd491186ea9c9069842155e.pdf
Владелец скрыт
4 мар. 2019 г.
7,4 МБ
ev3-ultrasonic-sensor-driving-base-61ffdfa461aee2470b8ddbeab16e2070.pdf
Владелец скрыт
4 мар. 2019 г.
1,6 МБ
Владелец скрыт
4 мар. 2019 г.
11,6 МБ
Владелец скрыт
4 мар. 2019 г.
2,5 МБ
Владелец скрыт
4 мар. 2019 г.
18,8 МБ
Lego mindstorms EV3 45544 инструкция по сборке Гироскоп.pdf
Владелец скрыт
4 мар. 2019 г.
4,6 МБ
Lego mindstorms EV3 45544 инструкция по сборке Роборука.pdf
Владелец скрыт
4 мар. 2019 г.
4,3 МБ
Lego mindstorms EV3 45544 инструкция по сборке Сортировщик.pdf
Владелец скрыт
4 мар. 2019 г.
4,4 МБ
Lego mindstorms EV3 45544 инструкция по сборке Транспортировщик.pdf
Владелец скрыт
4 мар. 2019 г.
5,4 МБ
Lego mindstorms EV3 45544 инструкция по сборке Щенок.pdf
Владелец скрыт
4 мар. 2019 г.
4,9 МБ
Lego mindstorms EV3 45560 инструкция по сборке Покоритель лестниц.pdf
Владелец скрыт
4 мар. 2019 г.
6,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 1.pdf
Владелец скрыт
4 мар. 2019 г.
5,9 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 2.pdf
Владелец скрыт
4 мар. 2019 г.
5,2 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Робот-монстр.pdf
Владелец скрыт
4 мар. 2019 г.
5,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Слон.pdf
Владелец скрыт
4 мар. 2019 г.
8,7 МБ
Lego mindstorms EV3 45560 инструкция по сборке Танкбот.pdf
Владелец скрыт
4 мар. 2019 г.
2,2 МБ
Владелец скрыт
4 мар. 2019 г.
31,9 МБ
lego-ev3-6-in-1 — копия.pdf
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
lego-mindstorms-ev3-home-manual-rus.pdf
Владелец скрыт
4 мар. 2019 г.
7,8 МБ
Владелец скрыт
4 мар. 2019 г.
3,2 МБ
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
Владелец скрыт
4 мар. 2019 г.
13 МБ
toddle bot-3dcad146d7f5deac4753f93e9dcc0739.pdf
Владелец скрыт
4 мар. 2019 г.
4,4 МБ
В этой папке нет файлов.Чтобы добавить файлы, войдите в аккаунт

Лего- конструирование
Кириллов Роман Александрович
Роботы в нашей жизни
Промышленные роботы
Космические роботы
Военные роботы
Нанороботы
Роботы-хирурги
Роботы -охранники
Экзоскелеты
Роботы для игр
robo-wiki.ru
Точные перемещения. Гироскопический датчик
Робот-чертёжник
Оборудование: базовый набор Lego Mindstorms Education EV3, канцелярская
резинка, фломастер (маркер) на водной основе, поле для чертежника из баннерной ткани, желателен ПЭТ-лист или лист из оргстекла поверх поля из баннерной ткани, влажная тряпка.
Механизмы: зубчатая передача.
Модель: РЧ-В1– робот-чертежник.
Описание.
Робот-чертежник построен на базе конструктора Lego EV3 и предназначен для построения разных рисунков и чертежей на ровной поверхности с помощью маркера (фломастера).
Чертежник имеет механизм опускания/подъема маркера на среднем моторе EV3. Маркер надежно фиксируется в механизме с помощью канцелярской резинки. Положение наконечника маркера можно настроить так, чтобы его кончик в нижнем положении совпадал с осью вращения робота.
Можно использовать два способа программирования поворотов чертежника. Первый – указать точное значение в градусах или оборотах в соответствующем блоке для поворота на заданный угол. Второй – подключить гироскопический датчик (гироскоп) и производить поворот по его показаниям.
robo-wiki.ru
Часть 1. Сборка механизма для опускания/подъема маркера
1
Для опускания и подъема маркера будем использовать средний мотор EV3
Закрепи две Т-балки
2
x1
x2
x1 z12
x4
x1
Установи ось на 9 модулей с зубчатым колесом на 20 зубчиков
3
Установи 4 черных штифта как показано на схеме
4
5
Установи две L-балки
x1 9M
x1
x4
x1 z20
x2
6
Установи два бежевых штифта с осями
7
Закрепи еще две L-балки
8
Установи две красные L-балки
x2
x2
x2
x2
9
Закрепи раму на серых штифтах
10
Установи красные L-балки с другой стороны. Основная часть механизма
собрана
x1
x2
x2
Для крепления резинки установи 4 красных штифта
11
12
x4
x4
x8
robo-wiki.ru
13
Установи две оси на 10 модулей или длиннее. Оси понадобятся для
правильной фиксации маркера
Установи две резинки и фиксатор. Резинки не дадут маркеру сдвинуться
влево-вправо, а сдвигая фиксатор вверх-вниз можно отрегулировать положение наконечника маркера «по вылету»
14
x2 10M
x2
x1
robo-wiki.ru
15
Установи два длинных бежевых штифта
16
Чтобы поворачивать механизм вручную соберем две ручки
x2
x2
x2
robo-wiki.ru
17
Закрепи на красных осях зубчатые колеса на 16. Будем их использовать для
ручной регулировки положения маркера по высоте
18
Установи канцелярскую резинку по данной схеме
x2 z16
robo-wiki.ru
19
Установи 4 черных штифта
Рамы понадобятся для крепления данной конструкции к моторам тележки
20
x4
x2
robo-wiki.ru
21
Закрепи маркер (фломастер) на водной основе, используя эту схему.
Перманентные маркеры использовать нельзя!
Колпачок пока не снимай!
robo-wiki.ru
Часть 2. Сборка тележки
1
Для передвижения чертежника по полю будем использовать два больших
мотора EV3, установленных вертикально
Установи оси и серые втулки
2
x2
x2 7M
x1 15M
x2
x2
robo-wiki.ru
3
Установи колеса
4
Добавь 4 синих штифта
5
Закрепи балки
x2
x4
x1 15M
x2 3M
robo-wiki.ru
6
x2
7
Данные штифты будем использовать для крепления механизма
опускания/подъема маркера
x4
x2
robo-wiki.ru
8
Соедини две конструкции
x1
x1
Должно получиться вот так:
robo-wiki.ru
9
Установи черные штифты по схеме
10
Установи черные штифты с другой стороны
x4
x4
robo-wiki.ru
11
Закрепи с помощью этих штифтов изогнутые белые балки
12
Балки на 13 будем использовать для установки блока EV3
13
Установи блок EV3
x2
x2 13M
x1
x6
robo-wiki.ru
14
Закрепи микрокомпьютер двумя балками на 13 с другой стороны тележки
Теперь нам нужна конструкция для установки третьего опорного колеса
15
16
x2 13M
x2
x2 15M
x4
x6
x4
robo-wiki.ru
17
x1 13M
18
Закрепи заднее опорное колесо
x1 3M
x2
x1
robo-wiki.ru
19
Порты для подключения моторов:
«B» — левый мотор тележки
«С» — правый мотор тележки
«А» — средний мотор
«A»
«C» «B»
robo-wiki.ru
Часть 3. Подключение гироскопического датчика
Закрепи датчик так, чтобы указанная на нем ось вращения (обозначена в
виде красной точки) совпадала по направлению с осью вращения робота
1
2
Соедини датчик с блоком EV3 с помощью кабеля.
Порт для подключения — «4»
x2
x1
x1
robo-wiki.ru
Часть 4. Задачи
Задача №1. Начерти квадрат, используя цикл. После запуска программы и перед началом движения робот ждет 1 секунду. Побеждает та команда, чья фигура ближе к идеальному квадрату.
Задача №2. Начерти три вложенных квадрата по данной схеме. После запуска программы и перед началом движения робот ждет 1 секунду.
Изменить алгоритм на свое усмотрение (изменяя параметры движения вперед и изменяя угол поворота, и зациклив робота на бесконечное число повторений тела цикла) и посмотреть какие фигуры будет рисовать робот
robo-wiki.ru
Задача №3. Начерти правильный n-угольник. Правильным n-угольником называется многоугольник, у которого равны все стороны и все углы между смежными сторонами.
При поворотах чертежнику необходимо повернуться на величину внешнего угла. Для нахождения внешнего угла используй формулу:
𝜶 =360 0 /n , где 𝒏 − число сторон многоугольника, 𝜶 ( альфа ) − внешний угол в градусах
Задача №4. Начерти пунктирную линию.
robo-wiki.ru
Задача №5. Начерти домик по данной схеме. Для этой задачи необходимо поле для чертежника с 7 точками.
100 баллов – если робот начертил всю фигуру, а вершины многоугольника находятся в пределах черной метки. Штраф 10 баллов взымается за каждую
вершину, которая вышла за пределы черной метки, но находится в пределах круга. Если вершина находится вне большого круга, фигура не засчитывается.
= 90 (угол подбирается экспериментально). Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания. Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием . » width=»640″
robo-wiki.ru
Часть 5. Советы программисту
1
После запуска программы установи блок ожидания, чтобы успеть убрать руку перед
началом движения робота:
2
Опускать и поднимать маркер лучше по времени. Если установить точное значение в
градусах или оборотах, то в случаях, когда мотор не может больше крутиться, а поворачивать еще надо, программа зависает на этом блоке.
3
- При повороте направо (по часовой стрелке) значения на гироскопическом датчике
растут. Алгоритм для поворота будет такой: поворачивайся на месте направо, пока датчик не покажет значение = 90 (угол подбирается экспериментально).
- Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания.
- Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием .
robo-wiki.ru
4
- При повороте налево (против часовой стрелки) значения на гироскопическом датчике
уменьшаются (уходят в минус). Алгоритм для поворота будет такой: поворачивайся на месте налево, пока датчик не покажет значение (угол подбирается экспериментально).
- Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания.
- Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием.
Спасибо за внимание!
Улыбнитесь!
Комплектация 45544 Mindstorms EV3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Комплектация 45560 Mindstorms EV3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Владелец скрыт
4 мар. 2019 г.
1,3 МБ
Владелец скрыт
4 мар. 2019 г.
9 МБ
ev3-cuboid-dc93b2e60bed2981e76b3bac9ea04558.pdf
Владелец скрыт
4 мар. 2019 г.
780 КБ
ev3-rem-color-sensor-down-driving-base-d30ed30610c3d6647d56e17bc64cf6e2.pdf
Владелец скрыт
4 мар. 2019 г.
1,3 МБ
ev3-rem-driving-base-79bebfc16bd491186ea9c9069842155e.pdf
Владелец скрыт
4 мар. 2019 г.
7,4 МБ
ev3-ultrasonic-sensor-driving-base-61ffdfa461aee2470b8ddbeab16e2070.pdf
Владелец скрыт
4 мар. 2019 г.
1,6 МБ
Владелец скрыт
4 мар. 2019 г.
11,6 МБ
Владелец скрыт
4 мар. 2019 г.
2,5 МБ
Владелец скрыт
4 мар. 2019 г.
18,8 МБ
Lego mindstorms EV3 45544 инструкция по сборке Гироскоп.pdf
Владелец скрыт
4 мар. 2019 г.
4,6 МБ
Lego mindstorms EV3 45544 инструкция по сборке Роборука.pdf
Владелец скрыт
4 мар. 2019 г.
4,3 МБ
Lego mindstorms EV3 45544 инструкция по сборке Сортировщик.pdf
Владелец скрыт
4 мар. 2019 г.
4,4 МБ
Lego mindstorms EV3 45544 инструкция по сборке Транспортировщик.pdf
Владелец скрыт
4 мар. 2019 г.
5,4 МБ
Lego mindstorms EV3 45544 инструкция по сборке Щенок.pdf
Владелец скрыт
4 мар. 2019 г.
4,9 МБ
Lego mindstorms EV3 45560 инструкция по сборке Покоритель лестниц.pdf
Владелец скрыт
4 мар. 2019 г.
6,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 1.pdf
Владелец скрыт
4 мар. 2019 г.
5,9 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 2.pdf
Владелец скрыт
4 мар. 2019 г.
5,2 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Робот-монстр.pdf
Владелец скрыт
4 мар. 2019 г.
5,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Слон.pdf
Владелец скрыт
4 мар. 2019 г.
8,7 МБ
Lego mindstorms EV3 45560 инструкция по сборке Танкбот.pdf
Владелец скрыт
4 мар. 2019 г.
2,2 МБ
Владелец скрыт
4 мар. 2019 г.
31,9 МБ
lego-ev3-6-in-1 — копия.pdf
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
lego-mindstorms-ev3-home-manual-rus.pdf
Владелец скрыт
4 мар. 2019 г.
7,8 МБ
Владелец скрыт
4 мар. 2019 г.
3,2 МБ
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
Владелец скрыт
4 мар. 2019 г.
13 МБ
toddle bot-3dcad146d7f5deac4753f93e9dcc0739.pdf
Владелец скрыт
4 мар. 2019 г.
4,4 МБ
В этой папке нет файлов.Чтобы добавить файлы, войдите в аккаунт
Робот чертёжник lego ev3 РобототехникаПодробнее

Drawer robot Lego EV3. Робот-чертежникПодробнее

Robot Drawer ev3 Mindstorms. Робот чертёжникПодробнее

Робот Чертёжник || Инструкция по сборке || Lego Mindstorms EV3 MOC || 3D Модель РоботаПодробнее
Робот Чертёжник || Новые геометрические фигуры || Lego Mindstorms Ev3Подробнее

Собрали роботов-чертежников || Конструктор Lego Mindstorms EV3Подробнее

3D Модель Робота || Робот Чертёжник || Инструкция по сборкеПодробнее

Робот — Чертёжник | lego mindstorms ev3Подробнее

Промробоквантум. Урок 33. Соревнование «Робот-чертёжник» (младшая категория)Подробнее

Робот-чертежник из Lego Mindstorms Education EV3Подробнее

Промробоквантум. Урок 8. Соревнование «Робот-чертёжник»Подробнее

Чертежник EV3 Прокат программы часть 1Подробнее

Чертежник EV3 Прокат программы часть 2Подробнее

Чертежник EV3. Прокат программы (часть 2)Подробнее

Чертежник EV3. Прокат программы (часть 1)Подробнее
