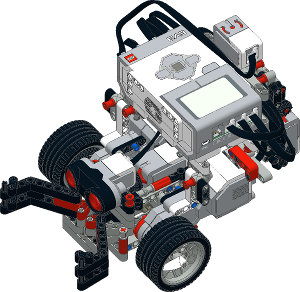
 Одним из видов соревнований по робототехнике является прохождение роботом лабиринта. Сегодня мы представляем простую модель, собранную на базе домашней версии EV3. Эту модель и программу вы можете использовать как пример для собственной модели робота. Это даст вам возможность принять участие в соревнованиях, которые проходят во многих крупных городах Украины.
Одним из видов соревнований по робототехнике является прохождение роботом лабиринта. Сегодня мы представляем простую модель, собранную на базе домашней версии EV3. Эту модель и программу вы можете использовать как пример для собственной модели робота. Это даст вам возможность принять участие в соревнованиях, которые проходят во многих крупных городах Украины.
Итак, начнем.
1) Скачайте архив с инструкцией по сборке
2) Распакуйте его в любую папку.
3) Запустите файл «Building Instructions [MazeSolver].html»
4) В бровзере откроется инструкция для сборки конструкции.
5) Скачайте программу для робота
6) Запустите среду программирования Lego Ev3 и загрузите файл «MazeSolver.ev3″
7) Подключите робота к ПК и загрузите программу в робота.
 Робот готов. Поставьте его рядом со стеной (датчик расстояния должен смотреть в стену).
Робот готов. Поставьте его рядом со стеной (датчик расстояния должен смотреть в стену).
9) Выберите на блоке управления загруженную программу с названием «index» и запустите ее.


Описание принципа работы
Робот использует два датчика:
— датчик касания (кнопка) для определения препятствия спереди
— датчик расстояния (в нашем случае удьтразвуковой, который можно заменить на инфракрасный) для определения препятствия справа.
После старта программы робот начинает двигаться вперед вдоль препятствия справа. Если препятсвие далеко (более 4 см), то он поворачивает вправо, приближаясь к препятствию. Если препятствие близко (менее 4 см), то робот поворачивает влево, удалясь от препятствия. Таким образом робот все время движется вдоль препятствия справа на одном расстоянии. Если препятсвие справа отсутсвует (поворот), то робот старается найти его и поворачивает вправо, пока не обнаружит его.
Если же препятствие будет спереди, то при его достижении сработает датчик касания (кнопка). В этом случае робот отъезжает назад, поворачивается влево на 90 градусов и включает алгоритм движения вдоль препятствия. И так по циклу.
Если переставить датчик расстояния на другую сторону, то робот будет двигаться вдоль препятствия слева.
Мы собрали два примера лабиринта для демонстрации.
Это базовая модель, которую вы можете улучшить, изменив некоторые параметры программы или усовершенстовав конструкцию.
До встречи в роболабиринтах!
Обновлено: 29 нояб. 2020 г.

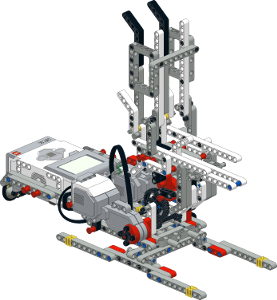
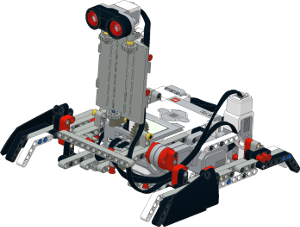
На этот раз я расскажу о роботе LEGO EV3, проходящем лабиринт ТУДА-ОБРАТНО.
Инструкцию по его сборке можно скачать по ссылке в описании. И хотя последовательность сборки, которую генерирует программа Lego Digital Disigner можно назвать странной, но, как видно, робот не очень сложный и даже с такой инструкцией собрать его не вызовет проблем.
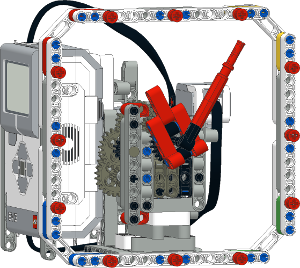
Чтоб ещё было понятней ниже 2 фото с видом сверху и снизу.
Вид сверху с откинутым блоком EV3:

Вид снизу:

Задачу прохождения лабиринта ТУДА-ОБРАТНО можно разбить на три этапа:
-
Прохождение роботом лабиринта ТУДА, то есть от клетки «старт» до клетки «финиш».
-
Анализ пройденного пути и вычисление оптимального (кратчайшего) пути ОБРАТНО.
-
По вычисленному пути ОБРАТНО возвращение робота в клетку «старт».
Прохождение роботом лабиринта ТУДА
Для прохождения роботом лабиринта ТУДА воспользуемся известным правилом правой руки.
Смысл этого правила – робот всегда должен держаться правой стены.
-
Если справа стена, а впереди свободно – делаем шаг вперёд (в нашем случае шаг равен длине стороны клетки лабиринта, то есть 30 см).
-
Если справа стены нет – поворачиваем направо и делаем шаг вперёд.
-
Если справа стена и впереди стена – поворачиваем налево и делаем шаг вперёд. При этом полного шага вперёд может и не получиться, и робот наткнётся впереди на стену. Это случится, если робот дошёл до конца тупика. Тогда ещё раз поворачиваем налево и делаем шаг вперёд.
Следуя этому правилу, мы обязательно достигнем конца лабиринта, пройдя при этом все тупиковые ответвления на своём пути.
Но в реальности получается не всё так гладко.
Мы должны держаться правой стены – то есть всё время контролировать расстояние до стены. При этом робот делает неизбежные небольшие отклонения по курсу. Пройти шаг ровно 30 см тоже не всегда удаётся из-за того, что правое и левое колёса хотя немного, но отличаются и по трению, и по размещению на оси и т.д. По этой же причине мы не можем повернуть ровно на 90 градусов при повороте налево или направо. То есть постоянно имеет место небольшая ошибка, которая с течением времени накапливается, и в конце концов наш робот неизбежно собьётся с пути – или наедет на стену, или сделает лишние повороты и т.д.
Чтобы избежать этого мы должны обязательно как-то позиционировать робот посередине клетки и как-то подправлять его угловое положение.
Во-первых, при движении прямо вдоль стены мы должны контролировать расстояние до правой стены в 7 см – этим мы всегда придерживаемся линии, проходящей примерно посередине клеток.
Во вторых, встретив стену прямо, мы упираемся в неё и не сразу отключаем моторы, а через пол секунды. Тем самым мы выравниваем робота перпендикулярно стене, то есть выравниваем его угловое положение. Далее отъезжаем назад на середину клетки и поворачиваем налево. При этом происходит сброс длины шага. Тем самым исключаем нарастающую ошибку по длине шага.
В третьих, если в результате поворотов мы всё же отклонимся от стены более чем на 10 см, то поворачиваемся направо к этой стене, упираемся в неё, выравниваем робота перпендикулярно этой стене, отъезжаем назад на середину клетки и поворачиваем налево.
Благодаря этим трём приёмам, нашему роботу всё же удаётся добраться до клетки финиша.
Анализ пройденного пути и вычисление оптимального (кратчайшего) пути ОБРАТНО.
При прохождении лабиринта ТУДА, робот движется по клеткам, делая всего три типа движения:
-
Налево
-
Прямо
-
Направо
Движения назад при корректировке положения не считаются информативными и в зачёт не идут.
Разворот робота – это два поворота налево подряд.
И каждое такое движение мы должны записывать в массив на всём пути ТУДА:
-
При повороте налево в массив записывается значение (-1).
-
При движении прямо на один шаг в массив записывается значение 0.
-
При повороте направо в массив записывается значение 1.
Пройдя до конца лабиринта, в массиве будут записаны все ходы нашего робота.
Итак, пройдя до конца этот лабиринт, робот записал в массив следующую последовательность ходов:
0, 0, 0, -1, -1, 0, 0, 1, 0, 0, 1, 0, 0, 1, 0, 1, 0, -1, -1, 0, -1, 0, -1, 0, 0, 1, 0, 1, 0, 0, -1, -1, 0, 0, 1, 0, 1, 0

В этом лабиринте три тупика в клетках A5, B4 и A2.
В массиве, который записал робот, мы видим три пары (-1)(-1).
0, 0, 0, -1, -1, 0, 0, 1, 0, 0, 1, 0, 0, 1, 0, 1, 0, -1, -1, 0, -1, 0, -1, 0, 0, 1, 0, 1, 0, 0, -1, -1, 0, 0, 1, 0, 1, 0
Именно здесь робот делал два подряд поворота налево. Это и есть разворот в конце тупика.
Рассмотрим ходы робота при прохождении тупика №1:
0, 0, 0, -1, -1, 0, 0, 1
Пара -1, -1 соответствует тупику в клетке А5.

Смотрим команды слева и справа от этой пары и попарно их складываем. Видно, что на всём протяжении тупика сумма равноудалённых от тупика ходов равна нулю:

Пара, сумма значений ходов которой > 0, и является выходом из тупика и соответствует клетке С5.
В данном случае на выходе из тупика сумма Σ = 1.

Давайте рассмотрим ходы робота при прохождении тупика №2:
1, 0, 0, 1, 0, 1, 0, -1, -1, 0, -1, 0, -1, 0, 0, 1

Этот тупик гораздо длиннее, но и для него попарная сумма значений ходов на всём протяжении тупика =0.

И пара, сумма значений ходов которой > 0, и является выходом из тупика и соответствует клетке С3.
В данном случае на выходе из тупика сумма Σ = 2.
В результате видно, что тупики бывают двух видов:
1. Тупик остаётся прямо, нам же перед тупиком надо повернуть налево. Сумма на выходе из тупика Σ = 1.

2. Заход в тупик с поворотом направо, нам же надо двигаться прямо, оставив тупик справа. Сумма на выходе из тупика Σ = 2.

Исходя из этого, сформулируем два правила сокращения тупиковых веток.
-
Если на выходе из тупика попарная сумма ходов Σ = 1, то есть для этого случая крайняя пара может быть вида (1+0) или (0+1). Тогда правило для этого случая:
Все пары ходов, сумма которых Σ < 1, из массива удаляются.
В крайней паре (1+0) или (0+1) значение 1 заменяется на -1.
Сама изменённая крайняя пара не удаляется.

2. Если на выходе из тупика попарная сумма ходов Σ = 2, то есть для этого случая крайняя пара может быть вида только (1+1). Тогда правило для этого случая:
Все пары ходов, сумма которых Σ < 1, из массива удаляются.
Сама крайняя пара (1+1) также удаляется.

По этим правилам теперь можно составить алгоритм программы оптимизации пути «ОБРАТНО», или удаления тупиковых ответвлений, и по этому алгоритму написать программу для нашего LEGO-робота.

Тут может возникнуть вопрос, а почему после удаления тупика программа начинает проверять путь опять с начала массива (index = 1), а не продолжает с того места, до которого уже дошла. Тогда вроде как можно бы было за один проход удалить все тупики.
Это было бы справедливо, если бы все тупики шли последовательно один за другим.

Но даже в таком простом лабиринте 5х4 можно разместить тупик в тупике, то есть разветвляющиеся тупики.

В таком тупике розовые клетки остаются несокращёнными. То есть путь до разветвления тупиков не удаляется.
Если же после удаления тупика 1,

мы начнём проверять массив с первого (правильнее нулевого) индекса, то ко второму проходу программы после удаления тупика 1 розовые клетки станут частью тупика 2 и поэтому удалятся при оптимизации пути.

А ведь вложенность тупиков может быть и больше двух, то есть тупик в тупике в тупике и т.д.
Поэтому проверку пути после каждого удаления тупика надо обязательно начинать с начала массива и количество проходов программы будет равно числу тупиков на пути до финиша.
Путь ОБРАТНО: возвращение робота в клетку «старт».
На пути «ОБРАТНО» правило правой руки отменяется.
Полученный массив после оптимизации является последовательностью ходов, которую должен выполнить робот, чтобы вернуться в клетку «старт».
Робот считывает этот массив, начиная с последнего элемента и до нулевого, и выполняет записанные в нём команды.
Ход (-1) теперь это поворот направо, ход 1 – поворот налево, ход 0 – остаётся ходом прямо.
При движении «ОБРАТНО» робот также контролирует расстояние до правой стены, и также если это расстояние превысит 10см поворачивается направо, упирается в стену, отъезжает на середину клетки и поворачивается налево.
▼Инструкция по сборке робота ▼
▼Программа labirint.ev3▼
▼Блок-схема алгоритма оптимизации массива пройденного пути▼
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.

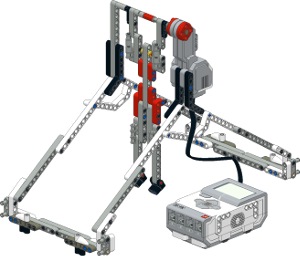
Пушка EV3
Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.
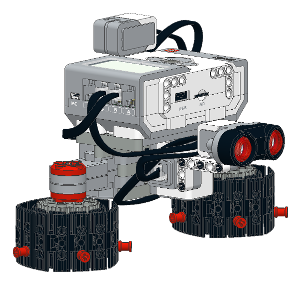
Робот с большими картонными колёсами
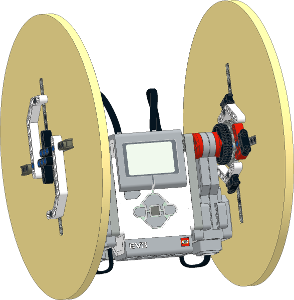
Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Робот-художник EV3 Print3rbot
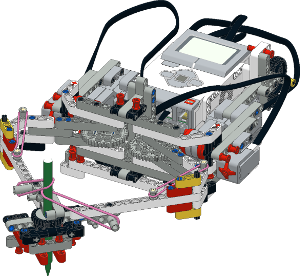
Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
Управление роботом LEGO Mindstorms EV3 от первого лица
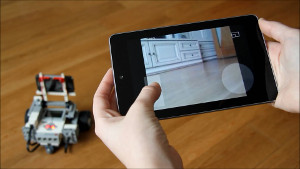
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
Обнаружение лица на EV3

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
Слежение за объектом на EV3
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.
Гимнаст EV3
Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
Гоночная машина формула 1 EV3

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.
Мойщик пола LEGO EV3
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
Робот с клешнёй LEGO EV3
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Селеноход из конструктора LEGO EV3
Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».
Собираем часы со стрелками из конструктора LEGO EV3
В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.
Приводная платформа EV3 на гусеничном ходу

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.
Комплектация 45544 Mindstorms EV3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Комплектация 45560 Mindstorms EV3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Владелец скрыт
4 мар. 2019 г.
1,3 МБ
Владелец скрыт
4 мар. 2019 г.
9 МБ
ev3-cuboid-dc93b2e60bed2981e76b3bac9ea04558.pdf
Владелец скрыт
4 мар. 2019 г.
780 КБ
ev3-rem-color-sensor-down-driving-base-d30ed30610c3d6647d56e17bc64cf6e2.pdf
Владелец скрыт
4 мар. 2019 г.
1,3 МБ
ev3-rem-driving-base-79bebfc16bd491186ea9c9069842155e.pdf
Владелец скрыт
4 мар. 2019 г.
7,4 МБ
ev3-ultrasonic-sensor-driving-base-61ffdfa461aee2470b8ddbeab16e2070.pdf
Владелец скрыт
4 мар. 2019 г.
1,6 МБ
Владелец скрыт
4 мар. 2019 г.
11,6 МБ
Владелец скрыт
4 мар. 2019 г.
2,5 МБ
Владелец скрыт
4 мар. 2019 г.
18,8 МБ
Lego mindstorms EV3 45544 инструкция по сборке Гироскоп.pdf
Владелец скрыт
4 мар. 2019 г.
4,6 МБ
Lego mindstorms EV3 45544 инструкция по сборке Роборука.pdf
Владелец скрыт
4 мар. 2019 г.
4,3 МБ
Lego mindstorms EV3 45544 инструкция по сборке Сортировщик.pdf
Владелец скрыт
4 мар. 2019 г.
4,4 МБ
Lego mindstorms EV3 45544 инструкция по сборке Транспортировщик.pdf
Владелец скрыт
4 мар. 2019 г.
5,4 МБ
Lego mindstorms EV3 45544 инструкция по сборке Щенок.pdf
Владелец скрыт
4 мар. 2019 г.
4,9 МБ
Lego mindstorms EV3 45560 инструкция по сборке Покоритель лестниц.pdf
Владелец скрыт
4 мар. 2019 г.
6,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 1.pdf
Владелец скрыт
4 мар. 2019 г.
5,9 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 2.pdf
Владелец скрыт
4 мар. 2019 г.
5,2 МБ
Lego mindstorms EV3 45560 инструкция по сборке Производитель волчков_часть 3.pdf
Владелец скрыт
4 мар. 2019 г.
4,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Робот-монстр.pdf
Владелец скрыт
4 мар. 2019 г.
5,1 МБ
Lego mindstorms EV3 45560 инструкция по сборке Слон.pdf
Владелец скрыт
4 мар. 2019 г.
8,7 МБ
Lego mindstorms EV3 45560 инструкция по сборке Танкбот.pdf
Владелец скрыт
4 мар. 2019 г.
2,2 МБ
Владелец скрыт
4 мар. 2019 г.
31,9 МБ
lego-ev3-6-in-1 — копия.pdf
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
lego-mindstorms-ev3-home-manual-rus.pdf
Владелец скрыт
4 мар. 2019 г.
7,8 МБ
Владелец скрыт
4 мар. 2019 г.
3,2 МБ
Владелец скрыт
4 мар. 2019 г.
9,1 МБ
Владелец скрыт
4 мар. 2019 г.
13 МБ
toddle bot-3dcad146d7f5deac4753f93e9dcc0739.pdf
Владелец скрыт
4 мар. 2019 г.
4,4 МБ
В этой папке нет файлов.Чтобы добавить файлы, войдите в аккаунт