
- Цена: $ 9.97
- Перейти в магазин
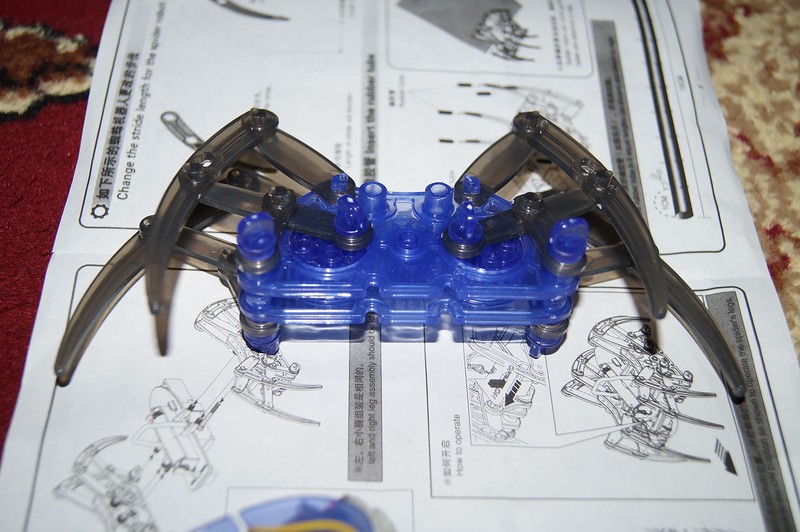
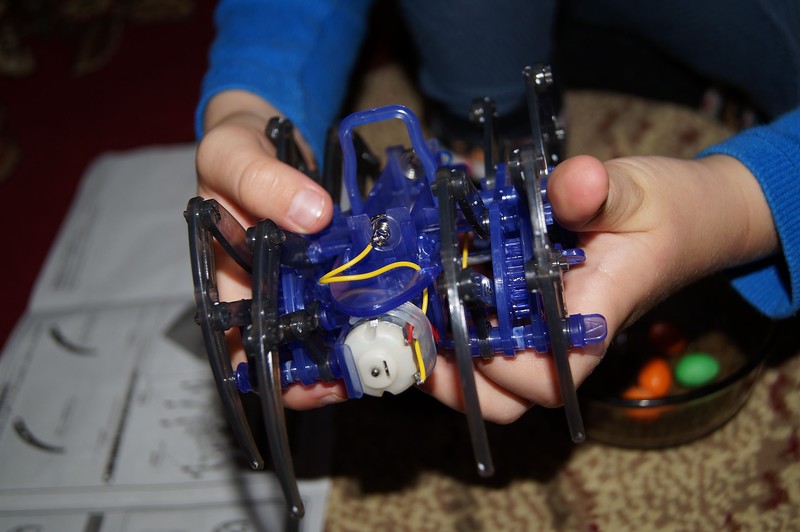
Приветствую! Представляю обзор конструктора для сборки простенького робота паука. Кратко: прикольная игрушка, ребенку будет интересно, причем он вполне может самостоятельно справиться со сборкой. Подробности далее.
Начнем как всегда с упаковки.


Вроде как от 10 лет. Имхо, возраст завышен.
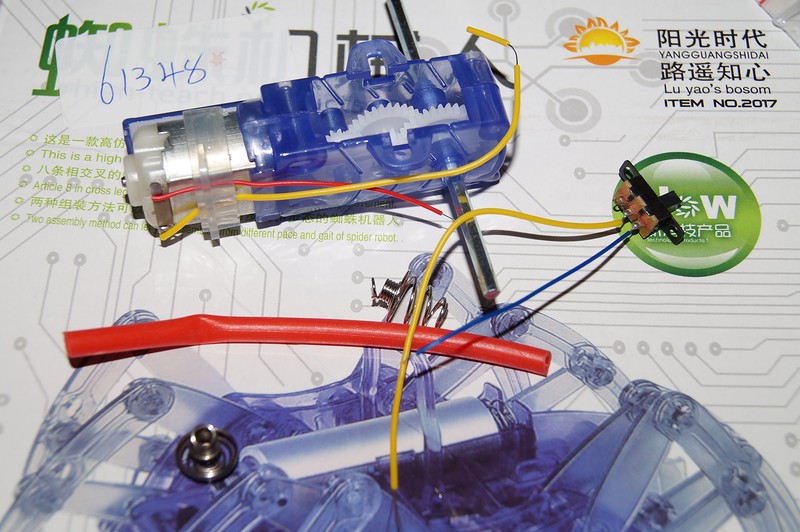
Содержимое


Силиконовая трубка. Для лучшего сцепления ног паука с поверхностью.
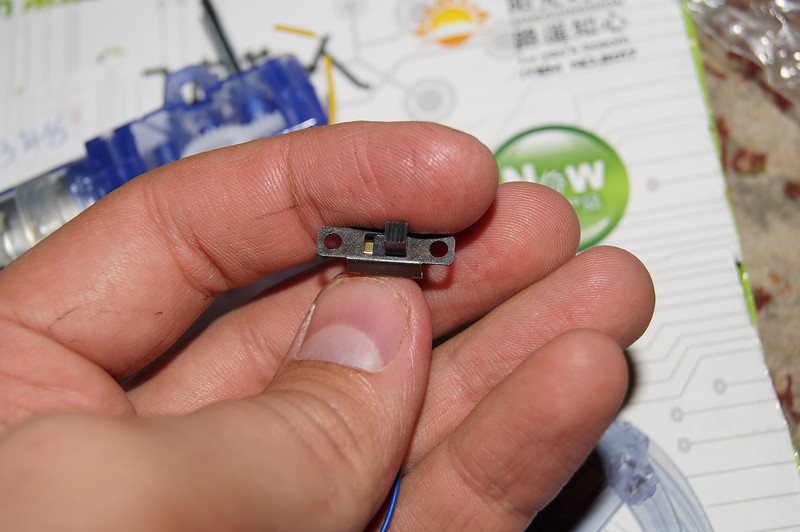
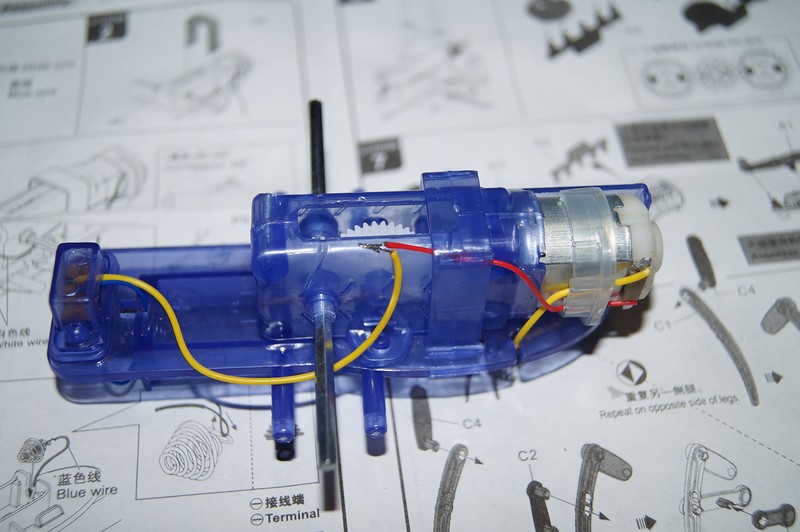
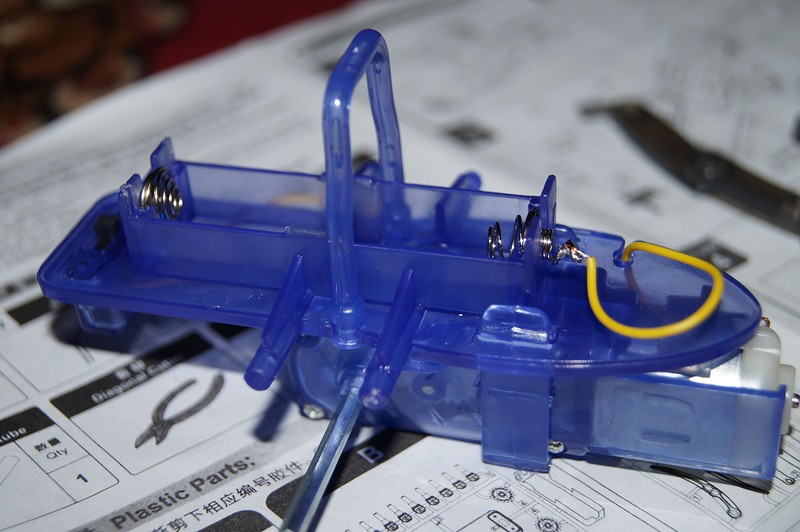
Переключатель вклвыкл. Провода везде уже припаяны.
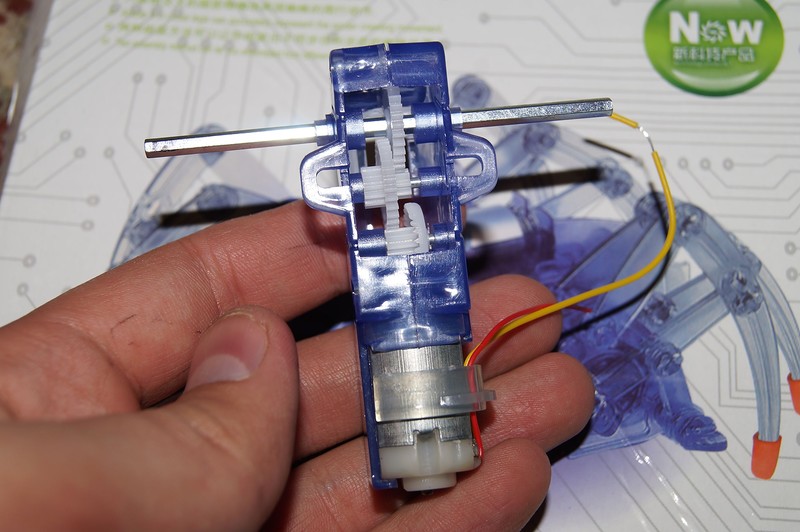
Движок был уже собранный
Пружинки для бат. блока

Литники с деталями





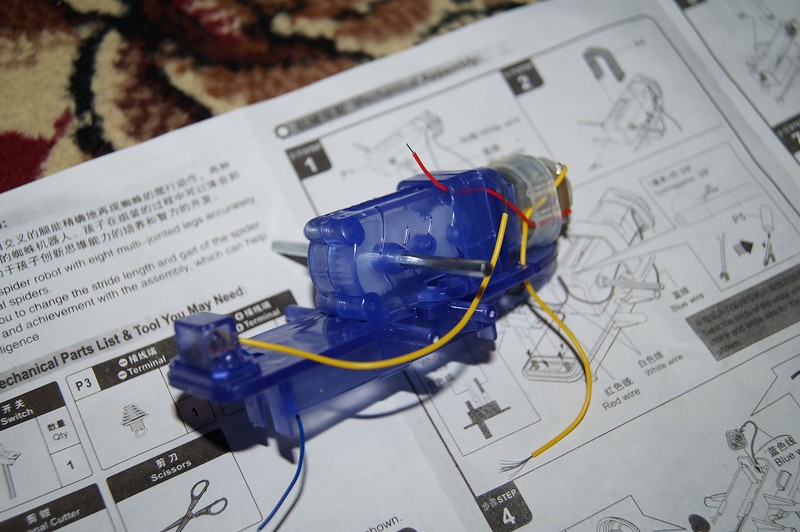
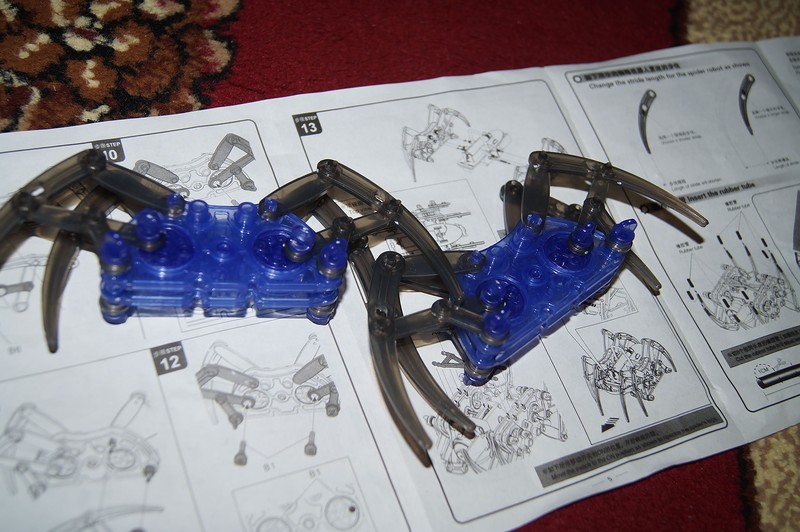
Приступим к сборке. Собирал все сын, я лишь объяснил разницу в сборке левого и правого набора лап.
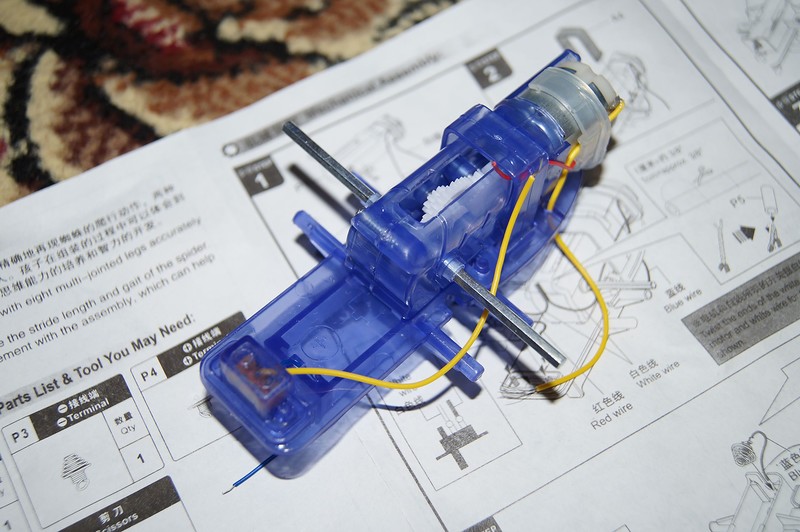
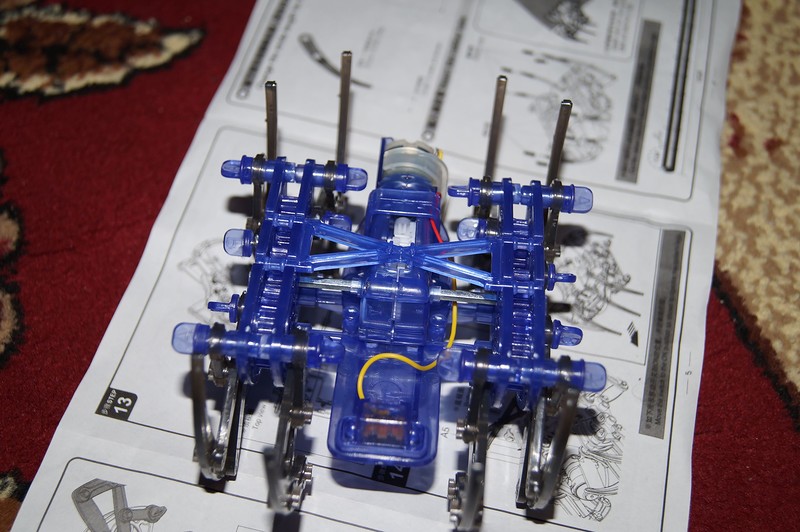
Нужно вставить переключатель и протянуть провода от моторчика
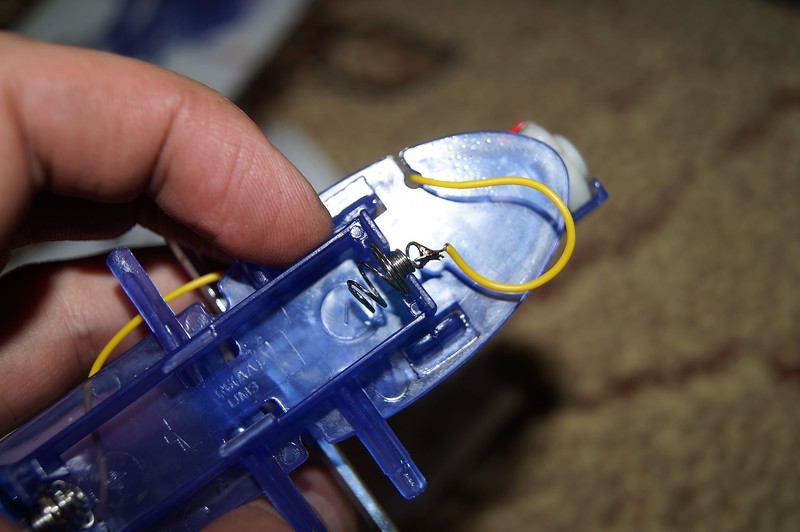
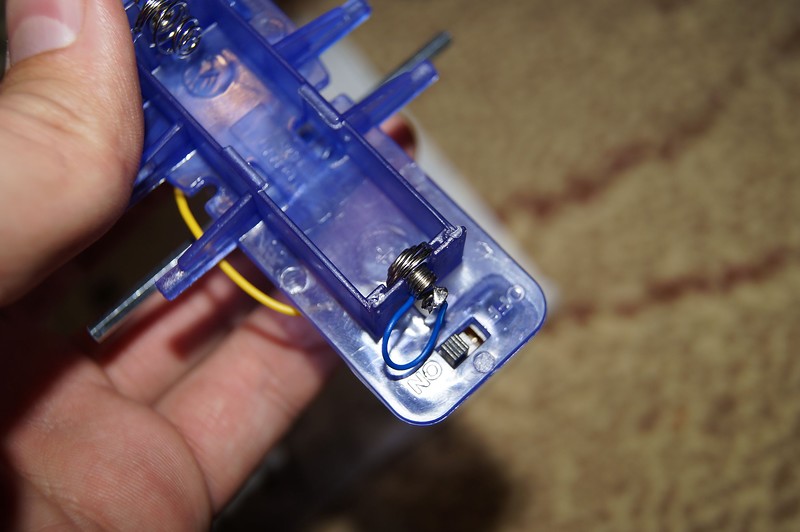
В инструкции предлагают сделать на скрутках, но я запаял. К пружинкам припаивал с аспирином, он воняет, поэтому сыну не дал.
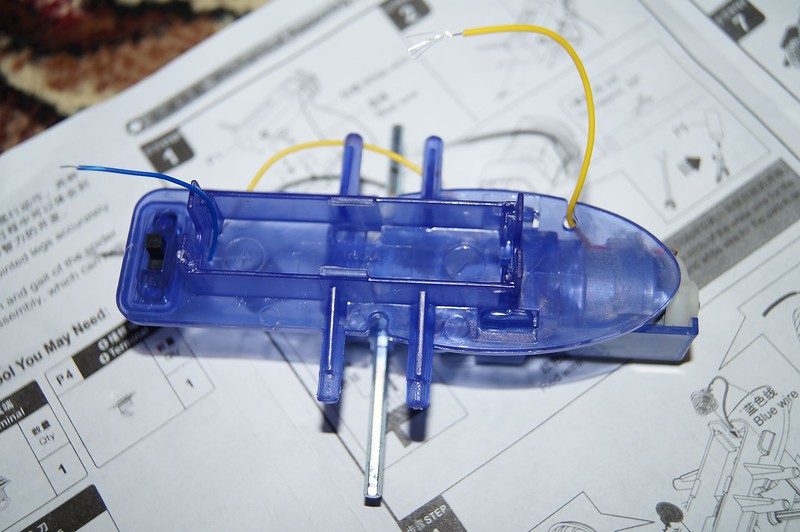
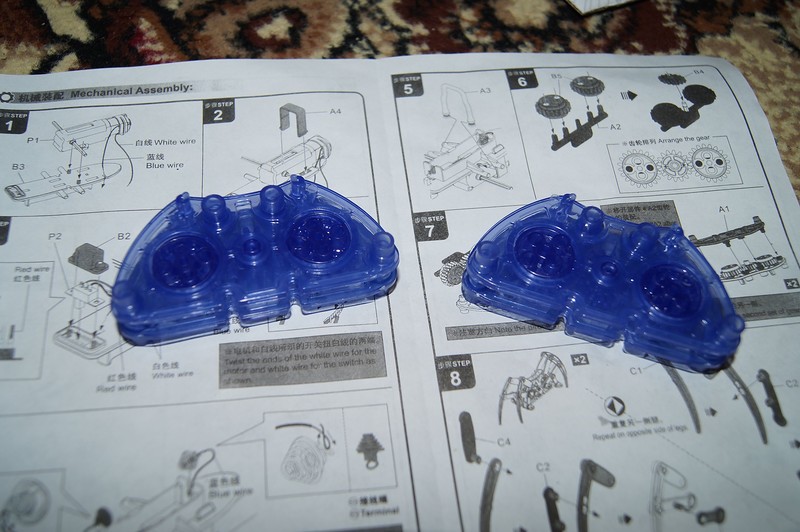
Две половинки тела, которые будут шевелить лапами.
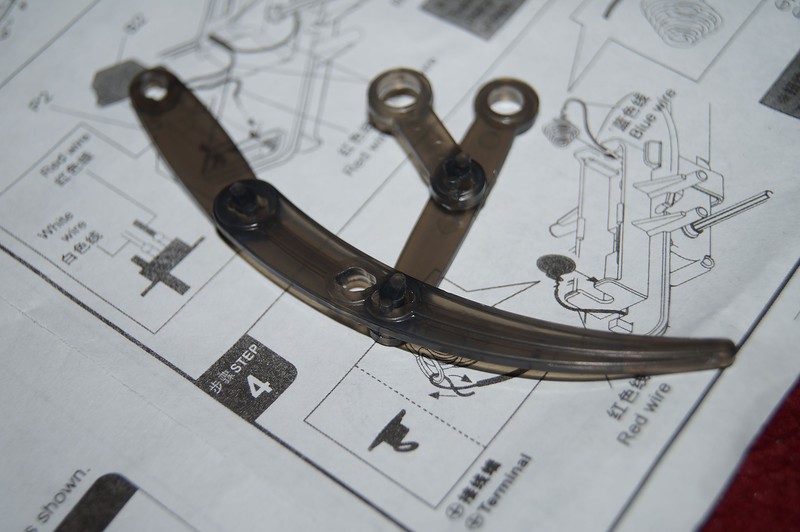
Собираем лапы

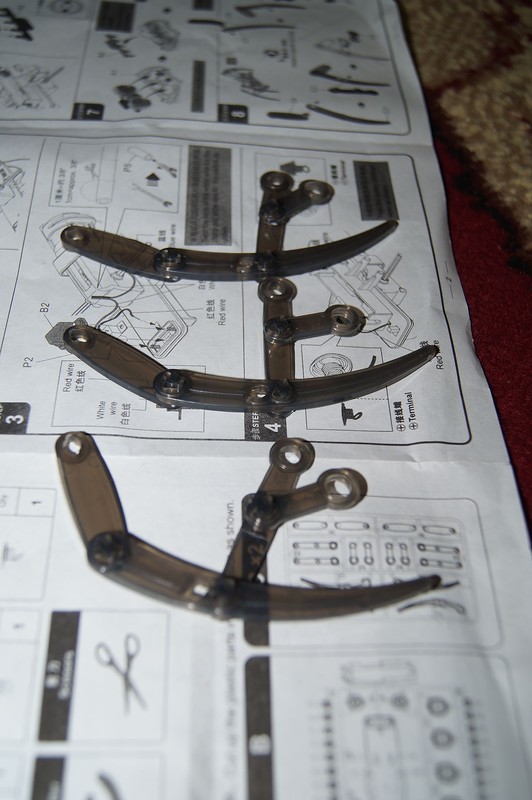

Крепим лапы
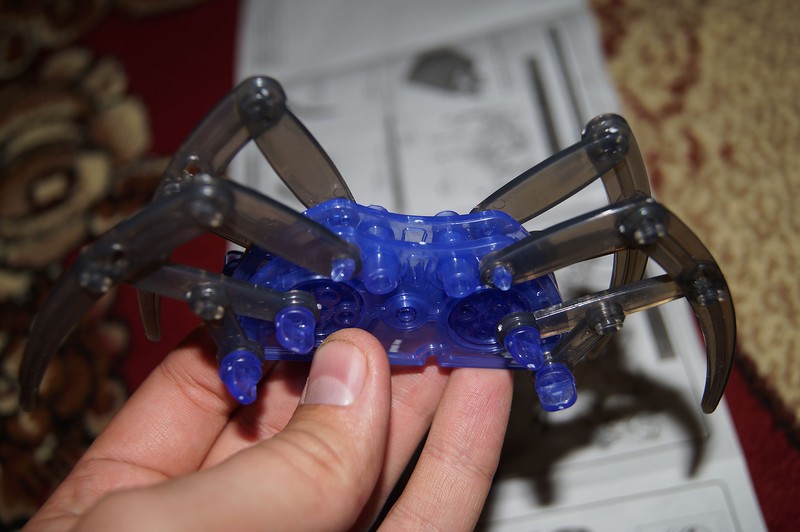

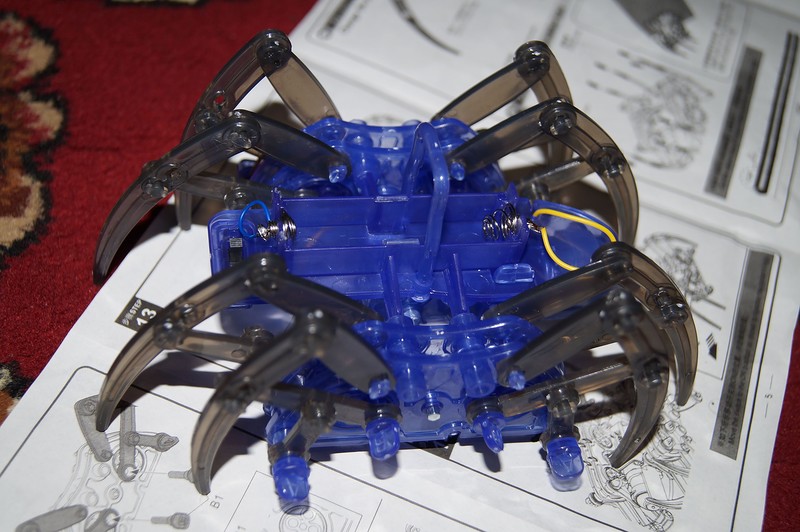
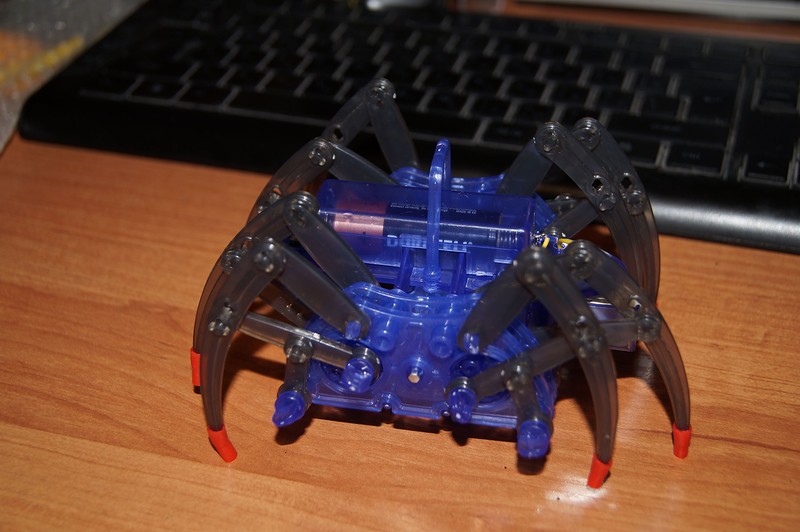
Все готово
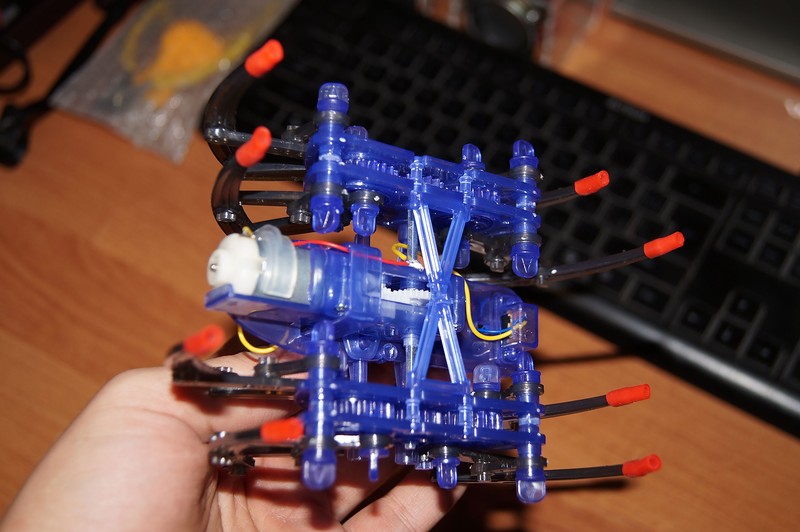
Режем трубку и одеваем кусочки на лапы
Видео в работе.
На фоне дочка возмущается)))
Итог: нормальная такая игрушка, пластик достаточно крепкий, сын не сломал)) Играл пару вечеров, потом интерес угас. Но ему собирать и что-то конструировать интереснее чем играть с результатом:) При цене, скажем, долларов 5 можно брать.
Спасибо за внимание!
Товар для написания обзора предоставлен магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить
+16
Добавить в избранное
Обзор понравился
+21
+59
Пошаговая инструкция по сборке и первоначальной настройке шасси шестиногого робота паука на Arduino (RKP-RCS-2013B-KIT). Часть первая.

На этом изображении (см. Рис. 1) показан пример собранного шестиногого робота паука с установленным на верхней плате дополнительным оборудованием в виде модуля Bluetooth для беспроводного внешнего управления.
Шаг первый это подготовка к сборке робота паука.
Организация питания для платы управления сервоприводами робота паука RKP-RCS-2013B-KIT.
Используйте медный провод (приобретается дополнительно, провод cиликоновый 20AWG (0,5 кв. мм) красный, 1м (артикул RCK049020) =>>) в изоляции красного цвета и два наконечника типа МАМА из комплекта поставки.

Аккуратно зачистив изоляционный слой на концах двух проводников (одинаковой длины примерно 5 см) и обжав наконечники, получаем первые необходимые детали для силовой цепи питания робота паука (см. Рис. 3).

Для создания следующего элемента силовой части цепи нам понадобится поставляемые в комплекте набора: тумблер переключатель и медный проводник в красной изоляции длинной примерно 12 см. Также необходимо приобрести отдельно ответную часть разъема с проводами питания для вашего аккумулятора, чтобы задействовать ее в создаваемой нами цепи питания. Мы будем использовать недорогой разъем типа JST с припаянными проводниками красного и черного цвета (длина проводников на разъеме примерно 10 см.).
Приобрести указанный разъем с проводниками можно тут =>>
Тип разъема JST нами выбран специально, так как это весьма распространенный и легкий разъем который предназначен для тока до 10A, что полностью удовлетворяет спецификации создаваемого нами робота паука RKP-RCS-2013B-KIT.
Для сборки воспользуемся паяльником! Необходимо припаять положительный контакт разъема от аккумулятора к среднему контакту тумблера переключателя (см. Рис. 4).

В результате по окончании сборки этого элемента силовой части питания шестиногого робота должна получится следующая деталь (см. Рис. 5).

Для подключения силовой части питания от аккумулятора через тумблер включения к плате управления сервомеханизмами необходимо воспользоваться поставляемым в комплекте блоком диодных выпрямителей.
Для одновременного управления восемнадцатью серво класса суб-микро (рулевая машинка 9 Gram GOTECK GS-9018) мы будем использовать весьма распространенный сервоконтроллер Servo Controller Board 32 Channel USB. Общая схема подключения силовой части питания робота паука к плате сервоконтроллера показана на изображении ниже (см. Рис. 6).

Внимание!
Перед установкой сервоприводов (18 штук GS-9018 Sub-Micro Servo) непосредственно на платформу шестиногого робота паука их необходимо отъюстировать через серво контроллер USB для Arduino RKP-SCB-32C, чтобы все сервоприводы заняли серединное центральное положение. В противном случае рулевые машинки (сервоприводы) будут работать НЕ правильно!
Подключив все 18 серво к сервоконтроллеру RKP-SCB-32C и правильно запитав его от батареи Li-Po, необходимо соединить его через порт USB с персональным компьютером на котором установлено специальное программное обеспечение (ПО) для настройки и регулировки сервоприводов.
Скачать программное обеспечение (софт) для программирования серво контроллера можно в статье «ПО для программирования сервоконтроллера на 16 и 32 сервопривода =>
Все 18 серво должны быть настроены на среднее положение ползунков как показано на расположенном ниже (см. Рис. 7).

Внимание!
После завершения этой операции по регулировке среднего положения ВСЕ сервомашинки необходимо отключить от платы сервоконтроллера Servo Controller Board 32 Channel USB (RKP-SCB-32C).
Следующий шаг это непосредственно начало сборки шасси шестиногого робота.
Начинаем, конечно, со сборки несущей платформы шагающего робота. Центральная несущая платформа робота паука предназначена для установки различных элементов управления роботом (плат управления, датчиков и сенсоров и т.д.), а также элементов силового питания робота (аккумуляторов, выпрямителей, выключателей и стабилизаторов).
Центральная несущая платформа шагающего робота паука на Arduino состоит из двух фрезерованных алюминиевых пластин скрепленных между собой латунными стойками. Это обеспечивает высокую точность и надежность для всей конструкции робота паука и является одновременно лучшим решением по соотношению веса для размещения полезной нагрузки.
Внимание!
Важным шагом является правильный выбор нижней пластины шасси робота. На первом этапе нам понадобится именно нижняя пластина для правильной сборки несущей платформы и установки на нее дополнительного оборудования и элементов питания шестиногого робота паука.
На изображении показана, для сравнения, визуальная разница между нижней и верхней платами из набора (см. Рис. 8).

Снимаем с алюминиевых деталей защитную пленку из полиэтилена. Обязательно определяем (по рисунку фрезерованных отверстий) НИЖНЮЮ плату шасси и устанавливаем латунные стойки M2 длинной 6 мм. всего 6 штук, закрепив их стальными винтами М2 длиной 5 мм (см. Рис. 9).

Места установки всех шести латунных стоек (M2x6) показаны на изображении (см. Рис. 10).
Примечание!
Все необходимые элементы находятся в комплекте поставки конструктора для самостоятельной сборки робота паука на Arduino.

Следующим шагом сборки несущей платформы будет установка диодного моста D25XB60 на специальное штатное отверстие (контактами вперед, плоской стороной к шасси).

Диодный мост D25XB60 — максимальный ток 25A, максимальное напряжение 600V.
 Посмотреть даташит диодного моста D25XB60 (формат PDF размер 430 КБ)
Посмотреть даташит диодного моста D25XB60 (формат PDF размер 430 КБ)
После установки на центральную пластину шасси робота паука диодного моста D25XB60, а также двух латунных стоек (M2x6) по одной с каждой стороны диодного моста D25XB60 собранная деталь несущей платформы шагающего робота должна выглядеть, как показано на изображении (см. Рис. 11).

Первые шесть установленных латунных стоек помимо обеспечения жесткости конструкции центральной платформы также предназначены, чтобы исключить всякие смещения аккумулятора LiPo 7,4V (2S) во время перемещений шагающего робота по пересеченной местности.
Силовой аккумулятор LiPo 7,4V (2S) должен иметь такие габариты, чтобы плотно прилегать к установленным шести латунным стойкам (M2x6) так как показано на изображении (см. Рис. 12)

Следующий шаг это установка четырех стоек из нейлона, предназначенных для крепления платы сервоконтроллера Servo Controller Board 32 Channel USB (RKP-SCB-32C).
Примечание!
Все необходимые элементы находятся в комплекте поставки конструктора для самостоятельной робота паука на Arduino (RKP-RCS-2013B-KIT).
Стойки для крепления сервоконтроллера выполнены из специального материала нейлон-66 (UL), имеют длину 18 мм, форму шестигранника и внутреннюю резьбу М3×0,5.
Необходимо закрепить четыре нейлоновые стойки через проделанные отверстия (только нижняя плата) при помощи винтов M3x6, как показано на рисунке (см. Рис. 13).
Примечание!
Отверстия для закрепления (при помощи нейлоновых стоек) выбранного самостоятельно контроллера управления и отличающегося по габаритам от рекомендуемого сервоконтроллера Servo Controller Board 32 Channel USB (RKP-SCB-32C) проделываются самостоятельно. Отверстия проделывают, исходя из габаритов и размеров отверстий выбранного сервоконтроллера для управления роботом пауком.

Следующим шагом по сборке будет подключение к плате сервоконтролера двухпозиционного переключателя USB/PS2. Для подключения необходимо воспользоваться тремя гибкими проводниками для макетирования, имеющими на концах проводника коннектор типа МАМА для подключения к штырькам находящимся на плате сервоконтроллера Servo Controller Board 32 Channel USB (RKP-SCB-32C). Необходимо воспользоваться паяльником, чтобы припаять обратные концы от трех гибких проводников для макетирования к трем контактам двухпозиционного переключателя. На схеме показано, к каким штырькам на плате сервоконтроллера RKP-SCB-32C подключать двухпозиционный переключатель (см. Рис. 14).
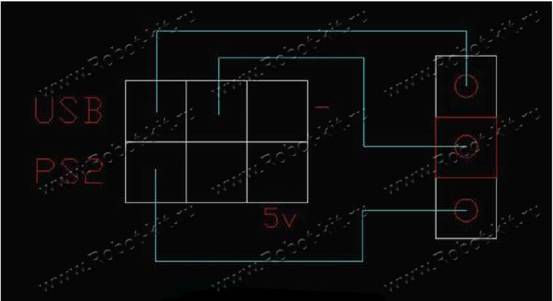
Длина используемых гибких проводников для макетирования должна быть достаточной, чтобы не создавался натяг проводника, и не изгибались штырьки на плате сервоконтроллера, к которым они подключены. Устанавливаемые гибкие проводники для макетирования могут иметь разные цвета.
Наборы проводников для макетных плат приобретаются отдельно =>>
На изображении ниже показана длинна проводников и место расположения двухпозиционного переключателя (см. Рис. 15).

Далее необходимо воспользоваться латунными стойками из комплекта поставки, 4 штуки M2x20 (тип мама-мама) и 4 штуки M2x20+3 (тип мама-папа) (см. Рис. 16).

Скрутив их между собой, получаем 4 стойки имеющие длину 4 сантиметра.
Уделяйте внимание точным измерениям при выборе латунных стоек M2x20 (тип мама-мама), поскольку в комплекте поставки шасси шестиногого робота паука RKP-RCS-2013B-KIT присутствуют также латунные стойки длинной 21 мм и 23 мм, которые устанавливаются в лапках робота паука (вторая часть пошаговой инструкции).
Скручивать стойки 4 штуки M2x20 (тип мама-мама) и 4 штуки M2x20+3 (тип мама-папа) нужно попарно как показано на изображении (см. Рис. 17).

Собрав, таким образом, все четыре стойки длинной 4 сантиметра необходимо прикрепить их четырьмя винтами M2x5 к нижней плате робота паука в специальных отверстиях, так как показано на изображении (см. Рис. 18).

Продолжение пошаговой инструкции по сборке робота паука на Arduino (часть вторая) =>>
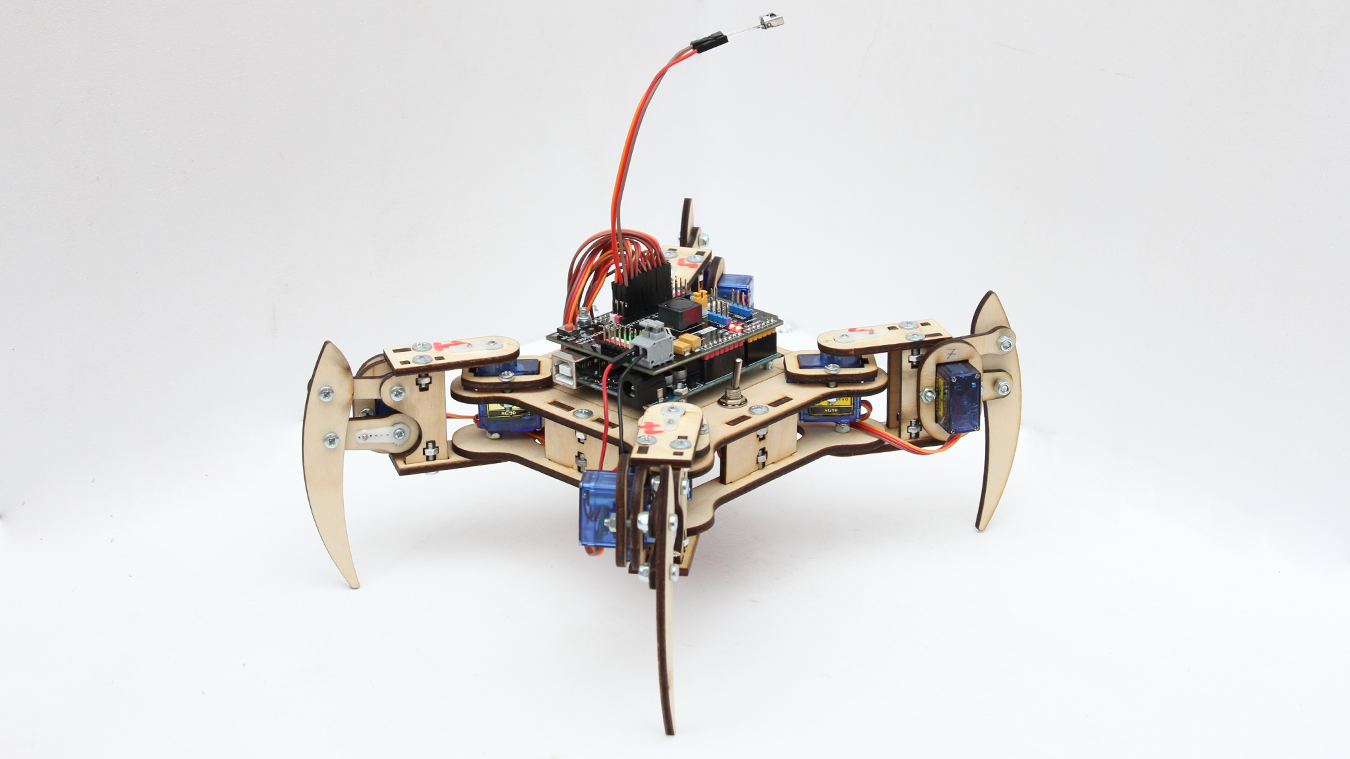
Инструкция по сборке и программированию робота — паука Quadruped на Arduino. Этот робот умеет перемещаться на 4 «ногах»: двигаться вперед, назад, влево , вправо, по диагонали. Управлять им будем с помощью ИК пульта и ИК датчика. К роботу можно присоединить датчик дальности или датчики линии для решения робототехнических задач, участия в соревнованиях.
Список комплектующих (Bill of materials)
| № | Название | Кол-во |
| 1 | Плата Arduino UNO | 1 |
| 2 | Плата расширения для подключения сервоприводов и питания iArduino Multi servo shield | 1 |
| 3 | Серво — моторы с металлическим редуктором SG90s | 8 |
| 4 | Батарейный отсек 18650×2 | 1 |
| 5 | Литиевые аккумуляторы 18650 | 2 |
| 6 | ИК пульт | 1 |
| 7 | ИК датчик | 1 |
| 8 | Джамперы Dupont разъем — разъем (female — female) 10 см | 3 |
| 9 | Провода | 1 м |
| 10 | Тумблер | 1 |
| 11 | Набор деревянных деталей для сборки | |
| 12 | Винты М3 x 10 потайные | 40 |
| 13 | Винты М3 x 12 | 16 |
| 14 | Винты М3 x 16 потайные | 4 |
| 15 | Винты м3х10 потайные | 2 |
| 16 | Гайки м3 самоконтрящиеся / Nylock | 17 |
| 17 | Гайки м3 | 45 |
Файлы для резки
Корпус робота вырезаем на лазерном гравере из фанеры 3мм. Чертежи в формате dxf скачиваем по ссылке.
Инструменты для сборки
- Отвертка крестовая или шлиц под винты М3
- Плоскогубцы (для закручивания самоконтрящихся гаек с усилием)
- Паяльник и расходники для пайки:
- флюс
- припой
- бокорезы или канцелярский нож для снятия изоляции
- Клеевой пистолет и клей для него
- Немного терпения и внимательности 🙂
Сборка робота
1. Выставляем сервоприводы на 90′
Перед сборкой выставляем все сервоприводы на угол 90′ . Сделать это можно c помощью простой программы:
#include <Servo.h>
Servo s; // cоздаем объект сервопривод под именем s, для управления 4 серво нужно создать 4 объекта
void setup() {
s.attach(8); // управляем серво на пине D8, таким образом нужно подключить все серво
}
void loop() {
s.write(90);// поворачиваем выбранный серво на угол 90 градусов
}2. Сборка конечностей
Далее собираем 4 конечности паука — ноги. Здесь подробно описываем инструкцию для одной ноги, остальные собираем аналогично.
| № | Название детали |
| 1 | Поворотная пластина верхней части ноги |
| 2 | Поворотная пластина нижней части ноги |
| 3 | Крепление сервопривода для ноги |
| 4 | Винтик сервопривода |
| 5 | Одинарная качалка сервопривода |
| 6 | Сервопривод |
| 7 | Ножка сервопривода |
| 8 | Ножная параллельная связующая |
| 9 | Ножная параллельная пластина |
| 10 | M3 x 10mm Винт (с шапочкой) |
| 11 | Гайка М3 |
| 12 | Гайка М3 самоконтрящаяся (нулок) |
| 13 | M3 x 12mm Винт |
| 14 | Фиксатор сервопривода |
| 15 | Шуруп сервопривода |
| 16 | Нога |
- Вставьте одинарный сервопривод в поворотную пластину верхней части ноги и вкрутите винт крепления сервопривода в одинарный рычаг сервопривода с задней стороны верхней поворотной пластины стойки(как на картинке выше).
- Вставьте одиночный рычаг сервопривода в рычаг сервопривода ноги и вкрутите винт крепления сервопривода в одиночный рычаг сервопривода с задней стороны рычага сервопривода ноги.
- Прикрепите одну параллельную тягу к ноге с помощью винта M3 x 10 мм и гайки M3 Nyloc.
- Прикрепите ногу к сервомеханизму ноги с помощью винта M3 x 10 мм и гайки M3 Nyloc. ВАЖНО! Не перетягивайте винты в шагах 2 и 3. Суставы ног должны двигаться свободно, НО НЕ БОЛТАТЬСЯ, чтобы предотвратить чрезмерное трение, которое может привести к отказу сервоприводов.
Часть 1 — Робот-паук

Это мой первый проект четырёхногого робота. Разработка первой версии длилась около года, последняя модификация уже четвёртая. Есть два варианта исполнения — под сервоприводы sg90 и mg90. Если интересна история развития проекта, можете посмотреть её в блоге.
Ещё два проекта, связанных с пауком – это симулятор на vPython и дистанционное управление с использованием Bluetooth. Они будут рассмотрены во второй и третьей части.
Делать такого паука весело, однако для его реализации Вам потребуется время и терпение.
Скачать все необходимые файлы можно по
этой ссылке.
Шаг 1: электроника
Список основных деталей:
-
1 x Arduino Pro Mini;
-
1 x 3А понижающий DC-DC преобразователь;
-
1 x модуль Bluetooth HC-06 или HC-05 (не обязательно);
-
12 x сервоприводов SG90 или MG90;
-
1 x 3000мАч литиевый аккумулятор (DC12300, 90x43x17мм);
-
1 x разъём питания;
-
1 x 680 Ом 1/4 Вт 5% резистор;
-
1 x 3мм светодиод;
-
1 x выключатель;
-
1 x макетная плата 5×7см;
-
Немного штыревых разъёмов PLS и PBS;
-
Немного одножильного или многожильного провода.
Шаг 2: делаем основную плату



Несколько советов по сборке печатной платы:
-
До установки на плату, убедитесь, что подстроечный резистор на модуле понижающего DC-DC преобразователя настроен правильно и на выходе модуля 5В;
-
Сервоприводы потребляют почти 3А в режиме полной нагрузки, используйте достаточно толстый провод;
-
Когда закончите пайку, с помощью мультиметра проверьте что бы не были соединены соседние выводы, которые не должны быть соединены;
-
Вместо пайки модулей непосредственно на макетную плату, запаяйте PLS и PBS разъёмы, в которые уже будут устанавливаться Arduino, модуль DC-DC, Bluetooth и сервоприводы;
-
Светодиод будет светиться, пока выключатель выключен. Так было сделано для проверки, исправен ли источник питания.
Шаг 3: проверка основной платы

Не подключайте модуль DC-DC и Arduino Pro Mini к основной плате.
Подключите аккумулятор к разъему основной платы.
Проверьте светодиод, если он светиться, это хорошее начало.
Нажмите выключатель питания, светодиод должен погаснуть.
С помощью мультиметра проверьте правильность всех выводов +5В и GND.
Нажмите выключатель питания, чтобы выключить питание, светодиод опять должен светиться.
Подключите DC-DC и Arduino Pro Mini к основной плате.
Нажмите выключатель питания, светодиод выключится, но светодиод Arduino Pro Mini включится.
Отключите питание и подключите сервопривод к первому ряду разъемов Leg1 основной платы (вывод 2 Arduino).
Загрузите скетч servo_test.ino в Arduino, сервопривод должен начать вращать вал от 0 до 180 градусов.
Шаг 4: механические детали


Моделирование производилось в программе в Sketchup Make. Кроме STL файлов, исходный файл моделей в Sketchup так же в открытом доступе.
Файлы для SG90 находятся в архиве Spider_robotquad_robot_quadruped-SG90.zip (папка «Spider3D parts»).
Список деталей и их количество:
-
1x body_d.stl
-
1x body_u.stl
-
2x coxa_l.stl
-
2x coxa_r.stl
-
2x tibia_l.stl
-
2x tibia_r.stl
-
4x femur_1.stl
-
8x s_hold.stl
Файлы для MG90 находятся в архиве Spider_robotquad_robot_quadruped-MG90.zip.
Список деталей и их количество:
-
2x tibia-f.stl
-
2x tibia-b.stl
-
2x coxa-f.stl
-
2x coxa-b.stl
-
4x femur.stl
-
8x hinge.stl
-
1x body-u.stl
-
1x body-m.stl
-
1x body-d.stl
Шаг 5: печать




Перед печатью проверьте настройки, печать займет много времени.
Мои настройки:
— плотность заполнения — 15%
— сопло — 0.3мм
— скорость печати — 65
Шаг 6: подготовка к сборке

Снимаем детали, проверяем качество печати объектов, удаляем бримы и затем наждачной бумагой полируем поверхность, чтобы она выглядела хорошо.
Шаг 7: начинаем собирать

Размещаем аккумулятор между верхней и нижней частью корпуса и соединяем с помощью четырёх винтов M3x25мм.
Шаг 8: сборка ног

Сервоприводы прикручиваем винтами M1.6×3мм.
Примечания:
1. Соедините все детали, но не устанавливайте качалку сервопривода на этом этапе;
2. Ориентируйтесь по фотографии и убедитесь, что все детали сориентированы правильно.
Шаг 9: собираем все 4 ноги

Соединяем все ноги с корпусом и проверяем, что все суставы двигаются гладко.
Шаг 10: подключение сервоприводов к основной плате


Размещаем основную плату на корпусе фиксируя её клеем или двусторонней липкой лентой. Ориентируясь по изображениям (цифрами помечено какие сервоприводы куда подключаются), подключаем все сервоприводы.
При подключении сервоприводов нужно не перепутать как подключать штекеры. На изображении основной платы вверху справа над разъёмами зелёным цветом указано где какие выводы («S», «+» и «-«).

Распиновка:
-
коричневый — земля («-«)
-
красный — плюс питания («+»)
-
сигнальный («S»)
Шаг 11: установка качалок

Для нормальной работы это важная процедура:
-
Загружаем скетч legs_init.ino в Arduino, чтобы сервоприводы провернули вал в начальное положение;
-
Выставляем ноги, как показано на изображении выше;
-
Устанавливаем на валы качалки и фиксируем их, вкручивая винты.
Шаг 12: провода

Что бы провода не мешались, и паук нормально выглядел, организуем провода. На этом сборка завершена.
Шаг 13: демонстрационный код
Устанавливаем библиотеку FlexiTimer2 (архив в файле flexitimer2_lib.zip).
Загружаем скетч spider_open_v1.ino в Arduino.
Вы увидите следующую демонстрационную последовательность движений:
1. встать, подождать 2сек
2. вперед на 5 шагов, подождать 2 секунды
3. назад на 5 шагов, подождать 2 секунды
4. поворот направо, подождать 2 секунды
5. поворот налево, подождать 2 секунды
6. движение «помахать рукой», подождать 2 сек
7. движение «пожать руку», подождать 2 сек
8. сесть, подождать 2 сек
9. вернуться к первому шагу
В скетче spider_open_v3.ino добавлено движение «танец».
Шаг 14: дальнейшее развитие проекта
Это хороший проект для старта и его можно адаптировать под себя. Можно добавить больше функций, например, динамическое изменение скорости движения. Реализовать дистанционное управление. Использовать другие аккумуляторы (18650 li-ion или пальчиковые Ni-Mh), добавить датчиков и т.д.
Перед аккумулятором нет платы защиты, и нужно следить что бы аккумулятор не разрядился слишком сильно. В противном случае это может привести к значительному снижению ресурса аккумулятора или выходу его из строя. В своём проекте Вы можете добавить плату защиты (как минимум с функцией защиты от глубокого разряда).
Кому больше нравиться собирать из модулей, а не паять, можно использовать другие детали. Вы можете сделать свой ремикс корпуса или использовать ремиксы, сделанные другими людьми:
https://www.thingiverse.com/thing:1009659/remixes
https://www.thingiverse.com/thing:2825097
https://www.thingiverse.com/thing:2901132










Часть 2 — Симулятор

Я использую vPython для симуляции движений моего робота-паука. Это упрощает проработку движений, которые затем реализуются на Arduino.
VPython — это язык программирования Python плюс модуль трехмерной графики. VPython позволяет легко создавать трехмерные интерфейсы и анимацию даже для тех, кто имеет ограниченный опыт программирования. Поскольку он основан на Python, он также может многое предложить опытным программистам.
Шаг 1: установка
Установить Python. Я рекомендую использовать версию 2.7.x
https://www.python.org/
потом vPython
https://vpython.org/contents/overview.html
и редактор PyCharm
https://www.jetbrains.com/pycharm/
Шаг 2: загрузка кода и запуск
В редакторе PyCharm откройте файл Spider_robot_vpython.py и запустите код. Вы увидите на экране причудливого трехмерного робота-паука.
Для управления используйте мышь. Зажав (нажать и держать) правую кнопку и перемещая мышь — вращение. Зажав среднюю (или одновременно правую и левую) и перемещая мышь — зум.
Создавайте свои движения в этом симуляторе.



Часть 3 — Управление по Bluetooth



Модули Bluetooth HC-06 и HC-05 очень популярные для Arduino. Оба модуля сделаны на одном чипе, но есть и отличия. Основное отличие заключается в том, что HC-06 может работать только в режиме ведомого. А HC-05 работает и в режиме ведомого и в режиме ведущего. В данном проекте используется HC-06.
При включении питания модуль HC-06 находится в режиме ожидания подключения. В этом режиме будет мигать светодиод. После подключения светодиод постоянно светиться.
Шаг 2: загрузка кода
Установите библиотеку из архива Arduino-serialcommand.zip.
Загрузите spider_open_v3.ino (из папки RemoteControl) в Arduino робота-паука.
Замечания:
Убедитесь, что HC-06 настроен корректно. Значения по умолчанию: 9600 бод, N, 8, 1. Pin-код «1234».
Если хотите изменить настройки, смотрите документацию. Документация на модули серии HC находится в файле «HC BT Module.pdf» (папка RemoteControl).
Я изменил скорость передачи данных на 57600. Для Arduino и модуля Bluetooth скорость должна быть настроена одинаково. Если модуль настроен на скорость 9600, 57600 или ещё сколько, в скетче spider_open_v3.ino должна быть такая же скорость.
void setup() {
//start serial for debug
Serial.begin(57600);
Шаг 3: подключение
1. Выполните процесс сопряжения перед подключением к роботу-пауку. Пин-код по умолчанию «1234»;
2. В Arduino IDE установите порт для блютуза, подключенного к компьютеру;
3. Откройте «монитор порта» (находится в меню «Инструменты»);
4. Проверьте настройки последовательного порта.

Теперь мы можем отправлять команды для управления.
Набор команд:
- w 0 1 — подняться;
- w 0 0 — опуститься;
- w 1 x — вперёд на x шагов;
- w 2 x — назад на x шагов;
- w 3 x — повернуть на право на x шагов;
- w 4 x — повернуть на лево на x шагов;
- w 5 x — движение » рукопожатие» x раз;
- w 6 x — движение «помахать лапой» x раз
Например, «w 0 1» это команда встать, а «w 1 5» это пройти на 5 шагов вперед.
С компьютера или ноутбука управлять можно не только через «монитор порта» в Arduino Ide или другом терминале, Вы можете создать свою программу. Ещё можно реализовать управление со смартфона, планшета или другой платы Arduino. Для телефонов и планшетов под управлением ОС Android в Google Play много программ терминалов, их можно использовать для тестового подключения. Очень легко создать свой пульт управления, используя MIT App Inventor.

Я все еще не закончил работу над пультом, все наработки можете посмотреть в моем блоге по ссылке http://regishsu.blogspot.tw/2015/09/robot-quadruped-robot-remoter.html
Автор: 許英豪 (RegisHsu)
Перевод и адаптация: RobotoTehnika.ru